跳跃机器人
本发明涉及机器人领域,具体涉及一种跳跃机器人。
背景技术:
1、跳跃机器人可以执行跳跃动作越过障碍物(例如水中跳跃、陆地跳跃或水陆两栖跳跃),从而高效地通过复杂地形,在太空探索、战场侦察、生命救援等领域有着广阔的应用前景。
2、机器人可重复弹跳问题一直是技术难点,也是国内外科研人员关注的焦点,机器人如果只是实现单次弹跳,再靠人为扶正姿态,进行下次弹跳,那么它的实际应用价值十分有限。
3、现有技术中的跳跃机器人需要借助扶正机构来进行主动扶正姿态,才能进行下一阶段的跳跃。例如中国专利文献cn202211337221.9所公开的一种跳跃机器人的扶正装置,其通过传动连杆驱动扶正腿相较于下跳跃板产生转动,以扶正支撑板,完成主动扶正操作。
4、然而,诸如上述现有技术中的跳跃机器人在落地时无缓冲(落地碰撞弹走)或采用加翅膀进行滑翔减速缓冲(空中轨迹易受外界环境干扰),导致跳跃落点不精确;此外,落地后跳跃机器人会倾倒,需要扶正装置进行机身扶正,操作较为繁琐、结构较为复杂。
技术实现思路
1、为至少部分解决现有技术的不足,本发明的主要目的是提供一种可进行落地缓冲的跳跃机器人。
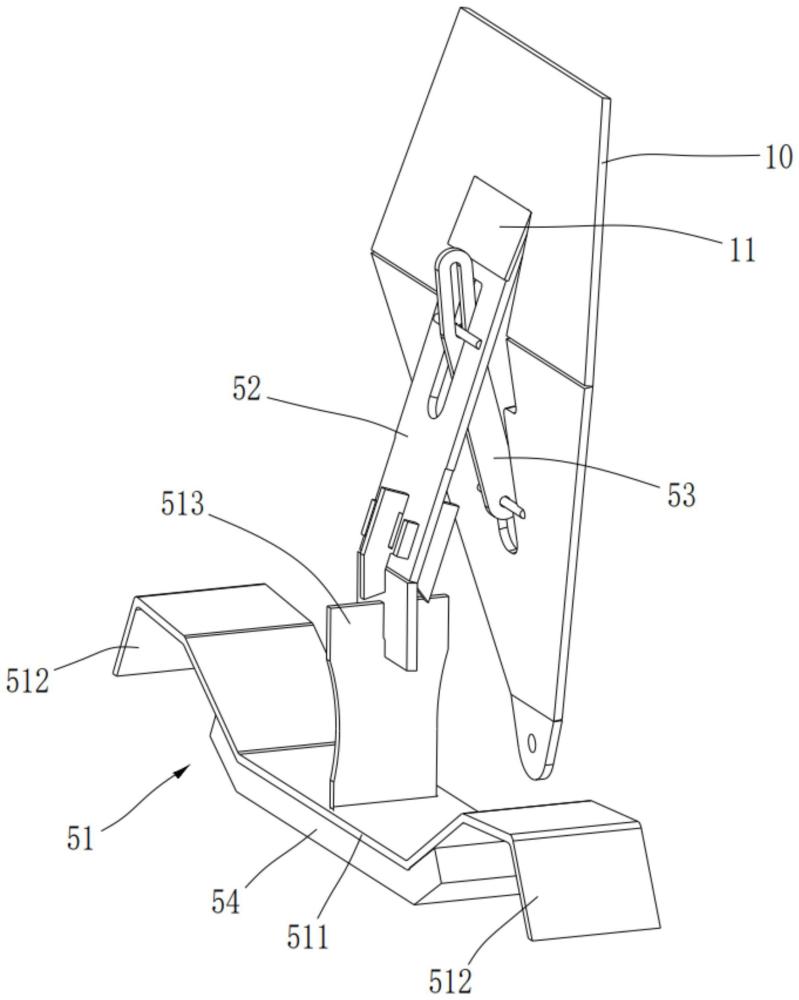
2、为了实现上述主要目的,本发明提供了一种跳跃机器人,包括跳跃主体,跳跃主体可产生跳跃前的折叠并在储能机构的驱动下产生跳跃动作;还包括用于在跳跃主体落地时进行缓冲的缓冲机构;
3、缓冲机构包括缓冲腿、连接构件和支撑构件;
4、连接构件的下端与缓冲腿在前后方向上转动连接,连接构件的上端与跳跃主体在前后方向上转动连接;
5、支撑构件的下端设置在跳跃主体上,支撑构件的上端与连接构件转动连接,以对连接构件形成随动支撑;
6、其中,跳跃主体上设有对应于连接构件的弹性部;跳跃主体落地过程中,连接构件会挤压弹性部并进行受迫旋转,以允许缓冲腿先与地面进行接触并可相对跳跃主体进行抬升,进而实现对跳跃主体的落地缓冲。
7、根据本发明的一种具体实施方式,弹性部为板簧,板簧与跳跃主体连接在一起或预制为一体。
8、根据本发明的一种具体实施方式,缓冲腿上设有附接结构,附接结构包括粘性材料层和吸盘组件的至少一种。
9、根据本发明的一种具体实施方式,缓冲腿包括缓冲腿本体以及设置在缓冲腿本体上的第一弹片,第一弹片可在跳跃主体落地过程中与地面接触并产生弹性变形。
10、进一步地,缓冲腿呈沿前后方向设置的板状结构;第一弹片设置在缓冲腿的前侧。
11、进一步地,缓冲腿还包括第二弹片,连接构件的下端通过第二弹片与缓冲腿本体相连接。
12、根据本发明的一种具体实施方式,支撑构件的上端与连接构件之间移动配合。
13、根据本发明的一种具体实施方式,缓冲腿可在跳跃主体折叠时自动进行抬升并与地面脱离接触。
14、进一步地,支撑构件的下端与跳跃主体之间转动连接,使得支撑构件与连接构件之间形成类曲柄滑块机构;其中,跳跃主体折叠时,支撑构件的下端与连接构件的上端之间的距离缩短,以通过支撑构件撑起连接构件并抬升缓冲腿。
15、根据本发明的一种具体实施方式,缓冲机构的数目为两组,两组缓冲机构设置在跳跃主体的左右两侧。
16、本发明具备以下有益效果:
17、本发明中的缓冲机构能够在跳跃主体落地时进行缓冲,使得跳跃机器人在跳跃落地后具有确切的位置,进而使得跳跃机器人整个轨迹都是可以准确可控的;保证落地的可靠性,在无需扶正装置的情况下便可实现跳跃机器人的连续跳跃,具有结构紧凑、稳定性好及实用性强的优点。
18、另外,本发明中的缓冲腿上设有附接结构,落地时可与地面间形成吸附而实现定位;相对于现有技术中仅关注起跳控制实现空中精确轨迹,本发明可有效避免跳跃机器人落地后被弹走,尤其是可通过附接结构实现跳跃机器人落地时直接附接在落点处,使得跳跃机器人落地后具有精确的、唯一的落点位置,进而可实现跳跃机器人连续的精确跳跃轨迹,即实现跳跃机器人在整个连续跳跃过程中的轨迹都是准确可控的。同时,再次起跳前无需额外驱动器便可实现缓冲腿的自动脱附(与地面脱离接触),不会影响跳跃机器人的连续跳跃性能。
19、为了更清楚地说明本发明的目的、技术方案和优点,下面结合附图和具体实施方式对本发明作进一步的详细说明。
技术特征:
1.跳跃机器人,包括跳跃主体,所述跳跃主体可产生跳跃前的折叠并在储能机构的驱动下产生跳跃动作;其特征在于:还包括用于在所述跳跃主体落地时进行缓冲的缓冲机构;
2.如权利要求1所述的跳跃机器人,其特征在于:所述弹性部为板簧,所述板簧与所述跳跃主体连接在一起或预制为一体。
3.如权利要求1所述的跳跃机器人,其特征在于:所述缓冲腿上设有附接结构,所述附接结构包括粘性材料层和吸盘组件的至少一种。
4.如权利要求1所述的跳跃机器人,其特征在于:所述缓冲腿包括缓冲腿本体以及设置在所述缓冲腿本体上的第一弹片,所述第一弹片可在所述跳跃主体落地过程中与地面接触并产生弹性变形。
5.如权利要求4所述的跳跃机器人,其特征在于:所述缓冲腿呈沿前后方向设置的板状结构;所述第一弹片设置在所述缓冲腿的前侧。
6.如权利要求4所述的跳跃机器人,其特征在于:所述缓冲腿还包括第二弹片,所述连接构件的下端通过所述第二弹片与所述缓冲腿本体相连接。
7.如权利要求1所述的跳跃机器人,其特征在于:所述支撑构件的上端与所述连接构件之间移动配合。
8.如权利要求1所述的跳跃机器人,其特征在于:所述缓冲腿可在所述跳跃主体折叠时自动进行抬升并与地面脱离接触。
9.如权利要求8所述的跳跃机器人,其特征在于:所述支撑构件的下端与所述跳跃主体之间转动连接,使得所述支撑构件与所述连接构件之间形成类曲柄滑块机构;其中,所述跳跃主体折叠时,所述支撑构件的下端与所述连接构件的上端之间的距离缩短,以通过所述支撑构件撑起所述连接构件并抬升所述缓冲腿。
10.如权利要求1所述的跳跃机器人,其特征在于:所述缓冲机构的数目为两组,两组所述缓冲机构设置在所述跳跃主体的左右两侧。
技术总结
本发明公开了一种跳跃机器人,包括跳跃主体,跳跃主体可产生跳跃前的折叠并在储能机构的驱动下产生跳跃动作;还包括用于在跳跃主体落地时进行缓冲的缓冲机构;缓冲机构包括缓冲腿、连接构件和支撑构件;连接构件的下端与缓冲腿在前后方向上转动连接,连接构件的上端与跳跃主体在前后方向上转动连接;支撑构件的下端设置在跳跃主体上,支撑构件的上端与连接构件转动连接,以对连接构件形成随动支撑;其中,跳跃主体上设有对应于连接构件的弹性部;跳跃主体落地过程中,连接构件会挤压弹性部并进行受迫旋转,以允许缓冲腿先与地面进行接触并可相对跳跃主体进行抬升,进而实现对跳跃主体的落地缓冲。本发明具有结构紧凑、稳定性好及实用性强的优点。
技术研发人员:李曜,李兵,胡龙龙,王诚昊
受保护的技术使用者:哈尔滨工业大学(深圳)(哈尔滨工业大学深圳科技创新研究院)
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!