一种户外蝎状机器人
本技术涉及仿生机器人,具体的,涉及一种户外蝎状机器人。
背景技术:
1、近年来地震发生越来越频繁,许多受灾地区又地处偏僻,当灾难发生时,救援过程中会经常遇到一些问题:被困者一般处于狭小的空间,导致救援者无法进入;发生灾难后,很多高楼都处于危险中,导致救援者不敢贸然进入,通常情况下,灾区的视野不是特别好,这也给救援者造成了不小的困难。
2、特别是救援的速度和定位准确性,因无法精准锁定被困人员位置导致错过最佳救援时间;因狭小空间救援者无法第一时间发现并快速进入而导致救援效率低下,所以十分有必要引入机器人进入灾难区救援,进行灵活的信息搜集,及时发现并准确定位被困人员,现有的仿生蝎子机器人,在设计上还是存在一定的缺陷,第一,无足够越障能力,自身高度或大小设计,对狭小空间无法进行搜寻;第二;腿部的力臂设计长而易形变,造成局部损坏而无法行动;第三;仅采用图像传感器做侦查,视野收集不灵活。因此,提供一种户外蝎状机器人,解决上述问题。
技术实现思路
1、本实用新型提出一种户外蝎状机器人,解决了相关技术中无足够越障能力,自身高度或大小设计,对狭小空间无法进行搜寻;腿部的力臂设计长而易形变,造成局部损坏而无法行动;仅采用图像传感器做侦查,视野收集不灵活等方面的问题。
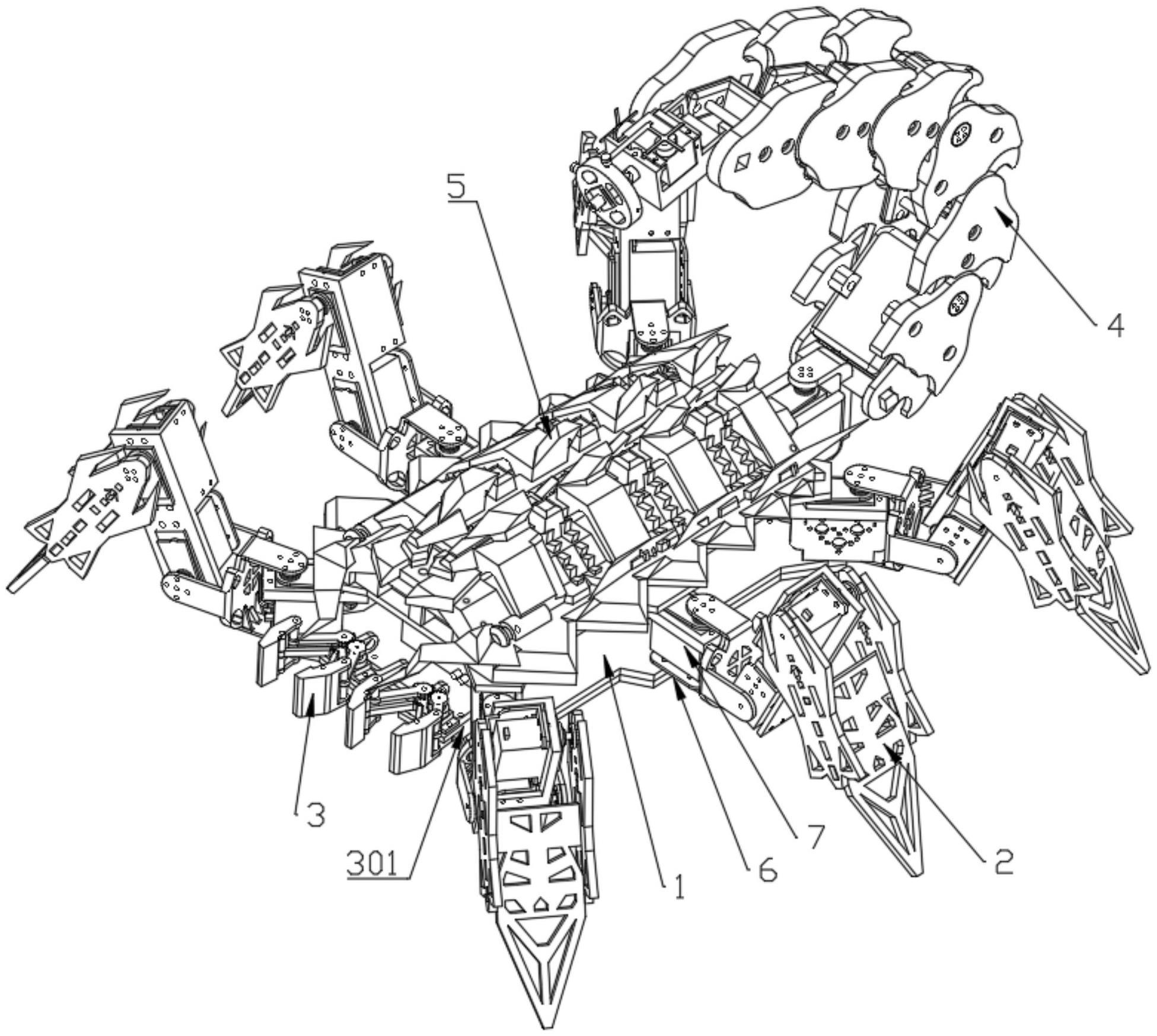
2、本实用新型的技术方案如下:包括呈中空结构的躯干主体、驱动腿组件、钳部组件以及尾部组件,其特征在于,所述躯干主体内置控制器,所述躯干主体的上表面固定设有防护外壳,所述躯干主体的两侧均设有对称的三个舵机架一,六个所述舵机架一呈对称设置,且其的内侧均固定安装有舵机一,所述舵机一与对应所述驱动腿组件传动连接,所述舵机一带动所述驱动腿组件沿水平方向转动,所述躯干主体的前端固定安装有用于清理障碍物的两个钳部组件,所述躯干主体后端固定安装有用于识别环境的尾部组件,所述驱动腿组件、钳部组件、尾部组件以及舵机一均分别与所述控制器电性连接。
3、作为本实用新型的一种优选技术方案,所述驱动腿组件包括错位连接件、二段连接块、舵机二、舵机三、左挡板、右挡板以及支撑腿,所述舵机一的输出端竖直设置并与所述错位连接件的一端连接,所述舵机二的输出端水平设置并与所述错位连接件的另一端连接,所述舵机二固定安装于二段连接块底壁上,所述二段连接块的顶壁上固定安装有舵机三,所述舵机三的输出端水平设置并与右挡板连接,支撑腿的两端分别与所述右挡板与左挡板固定连接,所述舵机二、所述舵机三均分别与所述控制器电性连接。
4、作为本实用新型的一种优选技术方案,所述钳部组件包括舵机架二、舵机四、主动半齿连杆、从动半齿连杆、连杆一、连杆二、左钳头以及右钳头,所述舵机架二固定安装于所述躯干主体前端,所述舵机架二的内部固定安装有舵机四,所述舵机四的输出端穿过所述舵机架二的上表面并与主动半齿连杆的一端同轴连接,所述主动半齿连杆的外齿与所述从动半齿连杆的外齿相啮合,所述主动半齿连杆的一端与所述左钳头的一端铰接,所述从动半齿连杆的一端与所述右钳头的一端铰接,所述舵机架二的上表面转动连接有连杆一和连杆二,所述连杆一的一端与所述左钳头的中部铰接,所述连杆二的一端与所述右钳头的中部铰接,所述舵机四与所述控制器电性连接。
5、作为本实用新型的一种优选技术方案,所述尾部组件包括固定安装于所述躯干主体后端的舵机五、连接板、第一关节、第二关节、第三关节、尾关节以及视觉识别组件,所述舵机五的输出端竖直设置并与连接板连接,所述连接板的一端固定连接有第一关节,所述第一关节的内部安装有舵机六,所述舵机六的输出端水平设置并与第二关节连接,所述第二关节的上端固定连接有第三关节,所述第二关节的内部安装有舵机七,所述舵机七的输出端水平设置并与所述尾关节连接,所述尾关节的一端安装有用于观察视野的视觉识别组件,所述视觉识别组件、所述舵机五、舵机六以及舵机七均分别与所述控制器电性连接。
6、作为本实用新型的一种优选技术方案,所述尾关节采用拼装插销式工字结构,且其关节数量为三节,且其对应关节首尾固定连接。
7、作为本实用新型的一种优选技术方案,所述视觉识别组件包括摄像头和视觉传感器,所述摄像头安装于所述尾关节的一端,所述摄像头的内部设有视觉传感器,所述摄像头的两侧还设有led灯,所述摄像头及led灯均与所述控制器电性连接。
8、本实用新型的工作原理及有益效果为:
9、1、通过舵机一、舵机二以及舵机三的设计,使六个驱动腿组件可自由独立调节,通过支撑腿在地面上支撑及行走,其立足点离散与地面接触面积较小,通过舵机一调整驱动腿组件水平角度,可实现0-180度旋转角,通过舵机二以及舵机三的组合调整驱动腿组件的开合,实现肢体抬升功能的同时,既能调整躯干主体的高度,也可在不同地形各自选择最好的支撑点,保证机身的相对平稳。
10、2、通过舵机四带动主动半齿连杆和从动半齿连杆运动,带动连杆一和连杆二运动,采用了齿轮连杆传动及两组平行连杆控制原理,从而使左钳头和右钳头夹紧或打开,使其具备抓取功能,通过两组连杆控制,以此来达到两边抓取面始终保持平行且角度不会发生变化的目的,使得抓取物体时更加的稳定,主动半齿连杆和从动半齿连杆采用了半齿齿轮设计来保证钳部组件在张开一定角度后不再继续张开,从而达到精确控制其张角的目的。
11、3、通过舵机六和舵机七来调整尾部组件的同时可以调整视觉识别组件的高度和位置,使在一定范围内更加灵活且运动范围广阔,尾关节采用拼装插销式工字结构,内部留有空间,在减轻尾部组件的同时,还可以大大提高结构的稳定性,通过连接在尾部组件使摄像头视野广阔,方向灵活,摄像头的两侧还配备了led灯,提供夜间照明的同时,可深入黑暗的缝隙中进行探查。
技术特征:
1.一种户外蝎状机器人,包括呈中空结构的躯干主体(1)、驱动腿组件(2)、钳部组件(3)以及尾部组件(4),其特征在于,所述躯干主体(1)内置控制器,所述躯干主体(1)的上表面固定设有防护外壳(5),所述躯干主体(1)的两侧均设有对称的三个舵机架一(6),六个所述舵机架一(6)呈对称设置,且其的内侧均固定安装有舵机一(7),所述舵机一(7)与对应所述驱动腿组件(2)传动连接,所述舵机一(7)带动所述驱动腿组件(2)沿水平方向转动,所述躯干主体(1)的前端固定安装有用于清理障碍物的两个钳部组件(3),所述躯干主体(1)后端固定安装有用于识别环境的尾部组件(4),所述驱动腿组件(2)、钳部组件(3)、尾部组件(4)以及舵机一(7)均分别与所述控制器电性连接。
2.根据权利要求1所述的一种户外蝎状机器人,其特征在于,所述驱动腿组件(2)包括错位连接件(201)、二段连接块(202)、舵机二(203)、舵机三(204)、左挡板(205)、右挡板(206)以及支撑腿(207),所述舵机一(7)的输出端竖直设置并与所述错位连接件(201)的一端连接,所述舵机二(203)的输出端水平设置并与所述错位连接件(201)的另一端连接,所述舵机二(203)固定安装于二段连接块(202)底壁上,所述二段连接块(202)的顶壁上固定安装有舵机三(204),所述舵机三(204)的输出端水平设置并与右挡板(206)连接,支撑腿(207)的两端分别与所述右挡板(206)与左挡板(205)固定连接,所述舵机二(203)、所述舵机三(204)均分别与所述控制器电性连接。
3.根据权利要求1所述的一种户外蝎状机器人,其特征在于,所述钳部组件(3)包括舵机架二(301)、舵机四(302)、主动半齿连杆(303)、从动半齿连杆(304)、连杆一(305)、连杆二(306)、左钳头(307)以及右钳头(308),所述舵机架二(301)固定安装于所述躯干主体(1)前端,所述舵机架二(301)的内部固定安装有舵机四(302),所述舵机四(302)的输出端穿过所述舵机架二(301)的上表面并与主动半齿连杆(303)的一端同轴连接,所述主动半齿连杆(303)的外齿与所述从动半齿连杆(304)的外齿相啮合,所述主动半齿连杆(303)的一端与所述左钳头(307)的一端铰接,所述从动半齿连杆(304)的一端与所述右钳头(308)的一端铰接,所述舵机架二(301)的上表面转动连接有连杆一(305)和连杆二(306),所述连杆一(305)的一端与所述左钳头(307)的中部铰接,所述连杆二(306)的一端与所述右钳头(308)的中部铰接,所述舵机四(302)与所述控制器电性连接。
4.根据权利要求1所述的一种户外蝎状机器人,其特征在于,所述尾部组件(4)包括固定安装于所述躯干主体(1)后端的舵机五(401)、连接板(402)、第一关节(403)、第二关节(404)、第三关节(405)、尾关节(406)以及视觉识别组件(407),所述舵机五(401)的输出端竖直设置并与连接板(402)连接,所述连接板(402)的一端固定连接有第一关节(403),所述第一关节(403)的内部安装有舵机六(408),所述舵机六(408)的输出端水平设置并与第二关节(404)连接,所述第二关节(404)的上端固定连接有第三关节(405),所述第二关节(404)的内部安装有舵机七(409),所述舵机七(409)的输出端水平设置并与所述尾关节(406)连接,所述尾关节(406)的一端安装有用于观察视野的视觉识别组件(407),所述视觉识别组件(407)、所述舵机五(401)、舵机六(408)以及舵机七(409)均分别与所述控制器电性连接。
5.根据权利要求4所述的一种户外蝎状机器人,其特征在于,所述尾关节(406)采用拼装插销式工字结构,且其关节数量为三节,且其对应关节首尾固定连接。
6.根据权利要求4所述的一种户外蝎状机器人,其特征在于,所述视觉识别组件(407)包括摄像头(8)和视觉传感器,所述摄像头(8)安装于所述尾关节(406)的一端,所述摄像头(8)的内部设有视觉传感器,所述摄像头(8)的两侧还设有led灯,所述摄像头(8)及led等均与所述控制器电性连接。
技术总结
本技术涉及仿生机器人技术领域,提出了一种户外蝎状机器人,包括呈中空结构的躯干主体、驱动腿组件、钳部组件以及尾部组件,所述躯干主体内置控制器,所述躯干主体的上表面固定设有防护外壳,所述躯干主体的两侧均设有对称的三个舵机架一,六个所述舵机架一呈对称设置,且其的内侧均固定安装有舵机一,所述舵机一与对应所述驱动腿组件传动连接。该机器人通过舵机二以及舵机三的组合调整驱动腿组件的开合,实现肢体抬升功能的同时,既能调整躯干主体的高度,也可在不同地形各自选择支撑点,保证机身的相对平稳,通过连接在尾部组件使摄像头视野广阔,方向灵活,摄像头的两侧还配备了LED灯,提供夜间照明的同时,可深入黑暗的缝隙中进行探查。
技术研发人员:肖新华,张庭俊,贺琰,游灿,陈加奇,尹阿宸
受保护的技术使用者:湖北理工学院
技术研发日:20230407
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!