一种水下机器人推进器
1.本发明涉及水下机器人技术领域,特别涉及一种水下机器人推进器。
背景技术:
2.水下机器人,也称无人遥控潜水器,是一种工作于水下的极限作业机器人,水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具,水下机器人的潜行驱动力依靠推进器实现。
3.然而,就目前传统的水下机器人推进器,多以螺旋桨推进器为主,但是采用传统的筒式结构推进器致使下潜或观测过程中,难以令机身保持位置静态以便观测,现有技术的推进器难以灵活实现机身的旋转,转矩较大不便于调整潜行方向;在下潜或水下探测累作业不需要进行观测时,不需要使用到旋转角度调整潜行方向的功能,推进器难以满足多种使用需求;传统的推进器难以保持机身的平衡,导致难以提供平视的水下观测视角;调整前行速度时,单纯依靠螺旋桨实现速度调控,对螺旋桨的损耗较大,难以通过其他方式配合螺旋桨实现前行速度调整的问题。
技术实现要素:
4.有鉴于此,本发明提供一种水下机器人推进器,其具有推进件和补充推件,可以令机体保持位置静态,使得机体到达观测或水下作业位置后可以辅助水下机器人稳定位置。
5.本发明提供了一种水下机器人推进器,具体包括机体;所述机体的前端固定连接有补充推件,机体的后端固定连接有推进件,机体共设有两组,两组机体之间固定连接有安装组件;所述推进件与机体之间连接处安装密封组件;所述安装组件包括有连轴和连杆,连轴和连杆之间固定焊接有两组连接杆;所述连接杆两组之间固定焊接有固定杆,连接杆的顶面垂直焊接有支杆;所述支杆上活动卡接有摆动板;所述固定杆上固定焊接有驱动盒;所述驱动盒的内部安装有摇摆组件;所述摇摆组件包括有下拉架,下拉架的两端为圆杆结构,圆杆的顶端之间固定设有拉条,且圆杆贯穿摆动板,拉条位于摆动板的顶面。
6.可选地,所述机体上设有内控制器和密封圈,内控制器通过无线连接至水上遥控和监测设备,且内控制器与推进件电性相连,密封圈处于机体与补充推件连接的接缝处。
7.可选地,所述推进件的内部设有推进螺旋桨和连接螺杆,推进螺旋桨的驱动转轴位于推进件的内部,连接螺杆贯穿机体的两端和推进件的外部,连接螺杆通过配合螺母固定连接机体和推进件。
8.可选地,所述密封组件包括有第一密封环、第二密封环、第三密封环和第四密封环,第一密封环位于机体与推进件连接的接缝处,第二密封环位于第一密封环的内侧,第三密封环位于推进螺旋桨的驱动转轴与推进件的接缝处,第四密封环位于机体与内控制器的接缝处。
9.可选的,所述补充推件上设有补充螺旋桨和连接环,补充螺旋桨电性连接至补充推件内部的独立控制模块和驱动电机,补充推件的内部设有独立无线连接模块且通过无线
连接至水上遥控和监测设备,连接环通过螺栓组件固定连接到机体的前侧。
10.可选的,所述连轴的两端固定连接到机体的外壁后侧,连杆的两端固定连接到机体的外壁前侧。
11.可选的,所述驱动盒上还设有安装杆,安装杆固定焊接在驱动盒的内部,且安装杆上固定安装有电机。
12.可选的,所述摇摆组件还包括驱动轴和上推架,驱动轴与驱动盒内部的电机转轴同轴连接,且驱动轴的末端活动卡接在安装杆的内部,驱动轴上固定焊接有两组凸轮,凸轮的一侧安装下拉架,凸轮的另一侧安装上推架,且下拉架和上推架的外壁分别固定粘接有密封套,且下拉架的高度高于上推架,上推架的顶面抵在摆动板的底面。
13.有益效果
14.根据本发明的各实施例的推进器,与传统推进器相比,水下作业下潜或观测过程中,利用补充螺旋桨可以平衡机体的前进或后退运动状态,从而可以通过控制推进螺旋桨和补充螺旋桨的转速令机体处于前后方向的位置静态,使得机体到达观测或水下作业位置后可以辅助水下机器人稳定位置。
15.此外,利用补充螺旋桨与推进螺旋桨相互配合,还可以完成机体的方向调整,使得水下作业推进时,令机体可以调整前进方向,当下潜或水下探测作业不需要水下机器人保持位置静态时,补充推件可以选择性不安装,从而利用推进件即可完成下潜作业,令装置拥有多种不同的使用方式,适用于水下作业不同的使用需求。
16.此外,利用连轴和连杆将两组机体固定连接为一个整体,使得机体水下推进时平稳移动,与传统筒式推进器相比,可以令机体的机身保持相对平衡,可以提供相对平视的视角,更适合于水下观测作业。
17.此外,当启动电机后同轴带动驱动轴旋转,进而带动两组凸轮旋转,凸轮每旋转一周,将上推架上推一次,而后将下拉架下拨一次,上推架被上推的同时推动摆动板上转,下拉架被下拨的同时拉动摆动板下转,如此往复,使得摆动板往复摆动,进而可以配合推进件调整进行前后方向的移动速度。
附图说明
18.为了更清楚地说明本发明的实施例的技术方案,下面将对实施例的附图作简单地介绍。
19.下面描述中的附图仅仅涉及本发明的一些实施例,而非对本发明的限制。
20.在附图中:
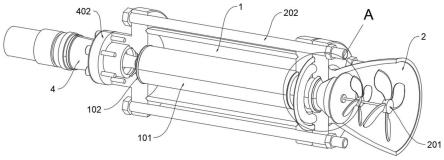
21.图1示出了根据本发明机体前侧视角的结构示意图;
22.图2示出了根据本发明图1的右侧仰视视角的结构示意图;
23.图3示出了根据本发明机体的剖面结构示意图;
24.图4示出了根据本发明安装组件的结构示意图;
25.图5示出了根据本发明驱动盒的剖面结构示意图;
26.图6示出了根据本发明摇摆组件的结构示意图;
27.图7示出了根据本发明图3中a处的放大结构示意图。
28.附图标记列表
29.1、机体;101、内控制器;102、密封圈;2、推进件;201、推进螺旋桨;202、连接螺杆;3、密封组件;31、第一密封环;32、第二密封环;33、第三密封环;34、第四密封环;4、补充推件;401、补充螺旋桨;402、连接环;5、安装组件;51、连轴;52、连杆;501、连接杆;6、摆动板;601、支杆;7、驱动盒;701、固定杆;702、安装杆;8、摇摆组件;81、驱动轴;82、下拉架;83、上推架;801、密封套。
具体实施方式
30.为了使得本发明的技术方案的目的、方案和优点更加清楚,下文中将结合本发明的具体实施例的附图,对本发明实施例的技术方案进行清楚、完整的描述。除非另有说明,否则本文所使用的术语具有本领域通常的含义。附图中相同的附图标记代表相同的部件。
31.实施例:请参考图1至图7:
32.本发明提出了一种水下机器人推进器,包括机体1;机体1的前端固定连接有补充推件4,机体1的后端固定连接有推进件2,机体1共设有两组,两组机体1之间固定连接有安装组件5;推进件2与机体1之间连接处安装密封组件3;安装组件5包括有连轴51和连杆52,连轴51和连杆52之间固定焊接有两组连接杆501;连接杆501两组之间固定焊接有固定杆701,连接杆501的顶面垂直焊接有支杆601;支杆601上活动卡接有摆动板6;固定杆701上固定焊接有驱动盒7;驱动盒7的内部安装有摇摆组件8;摇摆组件8包括有下拉架82,下拉架82的两端为圆杆结构,圆杆的顶端之间固定设有拉条,且圆杆贯穿摆动板6,拉条位于摆动板6的顶面。
33.此外,如附图1和附图3所示,补充推件4上设有补充螺旋桨401和连接环402,补充螺旋桨401电性连接至补充推件4内部的独立控制模块和驱动电机,补充推件4的内部设有独立无线连接模块且通过无线连接至水上遥控和监测设备,连接环402通过螺栓组件固定连接到机体1的前侧,水下作业下潜或观测过程中,利用补充螺旋桨401可以平衡机体1的前进或后退运动状态,从而可以通过控制推进螺旋桨201和补充螺旋桨401的转速令机体1处于前后方向的位置静态,使得机体1到达观测或水下作业位置后可以辅助水下机器人稳定位置,且利用补充螺旋桨401与推进螺旋桨201相互配合,还可以完成机体1的方向调整,使得水下作业推进时,令机体1可以调整前进方向,当下潜或水下探测作业不需要水下机器人保持位置静态时,补充推件4可以选择性不安装,从而利用推进件2即可完成下潜作业,令装置拥有多种不同的使用方式,适用于水下作业不同的使用需求。
34.此外,如附图3所示,机体1上设有内控制器101和密封圈102,内控制器101通过无线连接至水上遥控和监测设备,且内控制器101与推进件2电性相连,密封圈102处于机体1与补充推件4连接的接缝处,利用内控制器101使得机体1可以水上遥控,在机体1连接补充推件4时,密封圈102可以起到连接处的密封作用,在不连接补充推件4时,密封圈102起到阻水作用。
35.此外,如附图4所示,连轴51的两端固定连接到机体1的外壁后侧,连杆52的两端固定连接到机体1的外壁前侧,利用连轴51和连杆52将两组机体1固定连接为一个整体,使得机体1水下推进时平稳移动,与传统筒式推进器相比,可以令机体1的机身保持相对平衡,可以提供相对平视的视角,更适合于水下观测作业。
36.此外,如附图3所示,推进件2的内部设有推进螺旋桨201和连接螺杆202,推进螺旋
桨201的驱动转轴位于推进件2的内部,连接螺杆202贯穿机体1的两端和推进件2的外部,连接螺杆202通过配合螺母固定连接机体1和推进件2,利用推进螺旋桨201提供机体1的水下推进驱动力,利用连接螺杆202连接机体1和推进件2,可以一定程度上提高机体1的抗压能力,同时在机体1下潜的过程中,连接螺杆202可以保护机体1外壳免受撞击,起到保护作用。
37.此外,如附图5所示,驱动盒7上还设有安装杆702,安装杆702固定焊接在驱动盒7的内部,且安装杆702上固定安装有电机,利用固定杆701为驱动盒7提供安装和稳定,利用安装杆702为电机和摇摆组件8提供安装基础,且驱动盒7低于摆动板6,使得摆动板6在摇摆过程中拥有摇摆空间,不影响摆动板6。
38.此外,如附图6所示,摇摆组件8还包括驱动轴81和上推架83,驱动轴81与驱动盒7内部的电机转轴同轴连接,且驱动轴81的末端活动卡接在安装杆702的内部,驱动轴81上固定焊接有两组凸轮,凸轮的一侧安装下拉架82,凸轮的另一侧安装上推架83,且下拉架82和上推架83的外壁分别固定粘接有密封套801,且下拉架82的高度高于上推架83,上推架83的顶面抵在摆动板6的底面,当启动电机后同轴带动驱动轴81旋转,进而带动两组凸轮旋转,凸轮每旋转一周,将上推架83上推一次,而后将下拉架82下拨一次,上推架83被上推的同时推动摆动板6上转,下拉架82被下拨的同时拉动摆动板6下转,如此往复,使得摆动板6往复摆动,进而可以配合推进件2调整进行前后方向的移动速度。
39.此外,如附图7所示,密封组件3包括有第一密封环31、第二密封环32、第三密封环33和第四密封环34,第一密封环31位于机体1与推进件2连接的接缝处,第二密封环32位于第一密封环31的内侧,第三密封环33位于推进螺旋桨201的驱动转轴与推进件2的接缝处,第四密封环34位于机体1与内控制器101的接缝处,利用密封组件3使得机体1与推进件2之间形成双动态密封,且通过连接螺杆202减少第一密封环31和第二密封环32所受径向力,提高密封保护强度。
40.本实施例的具体使用方式与作用:本发明中,利用连接螺杆202连接机体1和推进件2,第一密封环31位于机体1与推进件2连接的接缝处,第二密封环32位于第一密封环31的内侧,使得机体1与推进件2之间形成双动态密封,连接螺杆可以一定程度上提高机体1的抗压能力,同时在机体1下潜的过程中,连接螺杆202可以保护机体1外壳免受撞击,起到保护作用;
41.水下作业下潜或观测过程中,利用补充螺旋桨401可以平衡机体1的前进或后退运动状态,从而可以通过控制推进螺旋桨201和补充螺旋桨401的转速令机体1处于前后方向的位置静态,使得机体1到达观测或水下作业位置后可以辅助水下机器人稳定位置;
42.当启动电机后同轴带动驱动轴81旋转,进而带动两组凸轮旋转,凸轮每旋转一周,将上推架83上推一次,而后将下拉架82下拨一次,上推架83被上推的同时推动摆动板6上转,下拉架82被下拨的同时拉动摆动板6下转,如此往复,使得摆动板6往复摆动,进而可以配合推进件2调整进行前后方向的移动速度。
43.最后,需要说明的是,本发明在描述各个构件的位置及其之间的配合关系等时,通常会以一个/一对构件举例而言,然而本领域技术人员应该理解的是,这样的位置、配合关系等,同样适用于其他构件/其他成对的构件。
44.以上仅是本发明的示范性实施方式,而非用于限制本发明的保护范围,本发明的保护范围由所附的权利要求确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1