混合动力驱动无人机的制作方法
[0001]
本实用新型涉及无机机领域,具体涉及混合动力驱动无人机。
背景技术:
[0002]
无人机是一种由无线电遥控设备或自身程序控制装置操纵的无人驾驶飞行器。随着无人机行业的迅速发展,越来越多的无人机被应用到农业、林业、电力、测绘、遥测等行业。
[0003]
目前的多旋翼无人机多采用电动变转速控制,因此具有结构与控制系统相对简单、成本较低、机动灵活、动作响应快、飞行姿态稳定、抗风能力强等优点,尤为适合在城市等地形复杂的区域低空飞行。但是多旋翼构型的缺点是气动效率比较低,且受制于电池技术,故造成续航能力普遍不足,续航时间一般都不大于30分钟,另外电池充电时间长,执行连续飞行任务的能力较差。
[0004]
采用内燃机作为动力源解决了电动无人机续航能力和连续任务能力的问题。采用内燃机直接驱动,通过改变内燃机转速来调整旋翼转速的控制方式具有结构简单的优点,但是存在内燃机变转速响应慢、内燃机特性与旋翼特性匹配困难、控制困难等缺点。目前内燃机直驱的多旋翼无人机多采用变距控制的方式,然而旋翼变距机构具有结构复杂、控制难度大的缺点。另外,如内燃机出现故障则直接影响无人机正常工作。
技术实现要素:
[0005]
本实用新型的目的是解决以上缺陷,提供混合动力驱动无人机,其可确保无人机能够持续正常飞行。
[0006]
本实用新型的目的是通过以下方式实现的:
[0007]
混合动力驱动无人机,包括机体、药箱、药泵、电池、电控盒和摄像机,机体由四根以上结构相同的机臂和设置于机臂外末端带旋翼的电机组件构成,每个电机组件、药泵、电池及摄像机均与电控盒进行电性连接,机体的中心设有中心支架,中心支架的内部设有用于安装电控盒的容纳腔,药箱设置于中心支架的顶面,所述机臂由外臂管和内臂管构成,外臂管和内臂管连接成一直线,内臂管的内侧端固定在中心支架的侧面,外臂管与内臂管之间通过可水平折叠的横向铰链进行连接,并在外臂管与内臂管之间设有用于锁紧横向铰链的锁套,内臂管远离外臂管的末端底部设有向下延伸的喷头,药泵的抽水端和出水端均通过药管分别与药箱和喷头连接,中心支架的底部设有发动机和两根呈八字形对称向下延伸的脚架,并在两根脚架之间固定安装有油箱,电池固定安装于油箱的顶部,油箱通过油泵及油管与发动机连接,且发动机与电控盒进行电性连接,电控盒内设置有电源切换模块,发动机和电池均用于给无人机供电,当发动机工作异常时,通过电源切换模块切换至电池单独给无人机供电。
[0008]
上述说明中,作为优选的方案,所述中心支架的底部设有向下延伸的支撑板,摄像机和药泵均固定安装在支撑板上,并在支撑板上还设置有雷达。
[0009]
上述说明中,作为优选的方案,所述外臂管和内臂管均为中空结构,药管布设于外臂管和内臂管的内部。
[0010]
上述说明中,作为优选的方案,所述中心支架的底部设有四个用于安装脚架且开口向下的套筒,每根脚架均由中空管折弯成型构成,中空管的两末端均向上,且配对插入两个套筒内,中空管的底部两末端向下凹陷形成接触部,并在接触部上设有缓冲胶套,两根中空管的中部通过底板进行连接,油箱固定安装在底板的顶面。
[0011]
上述说明中,作为优选的方案,所述机臂共设有四根,中心支架由上中心板、下中心板和侧板构成,上中心板和下中心板均平行于水平面,容纳腔位于上中心板与下中心板之间,侧板上留有四个用于固定安装机臂的侧孔。
[0012]
上述说明中,作为优选的方案,所述内臂管远离外臂管的一端表面设有半导体制冷片,半导体制冷片其中一面为制冷面,半导体制冷片另一面为制热面,半导体制冷片的制冷面紧贴着内臂管表面,并在半导体制冷片的制热面设置有散热片。
[0013]
上述说明中,作为优选的方案,所述电机组件由电机座、电机和两片桨叶构成,电机座安装在内臂管远离外臂管的末端,两片桨叶均通过桨夹进行安装,桨夹可带动两片桨夹旋转至同一方向。
[0014]
本实用新型所产生的有益效果是:机臂由外臂管和内臂管构成,内臂管可通过横向铰链与外臂管进行水平折叠,且折叠时操作简单,直接通过锁套即可实现锁紧,锁紧后禁止折叠且可保证外臂管与内臂管不会产生任何松动,折叠后可节省空间,便于包装和运输,每个机臂外末端均设置有喷头,确保药液喷洒均匀,另外,同时设置有电池和发动机对无人机进行双重保护,通过电源切换模块进行合理切换,油箱内的机油给发动机提供燃料,当发动机工作异常,如功率不足、熄火、燃料耗尽时,将会自动控制切换至电池稳定供电模式,确保无人机能够持续正常飞行,从而可提高无人机飞行的稳定性及续航时间。
附图说明
[0015]
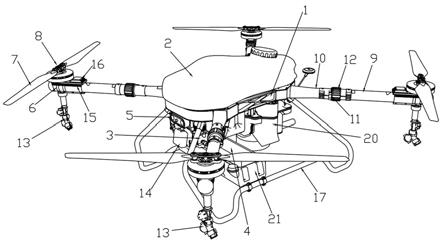
图1为本实用新型实施例俯视角度的立体结构示意图;
[0016]
图2为本实用新型实施例另一俯视角度的立体结构示意图;
[0017]
图3为本实用新型实施例仰视角度的立体结构示意图;
[0018]
图中,1为中心支架,2为药箱,3为药泵,4为电池,5为摄像机, 6为电机座,7为桨叶,8为桨夹,9为外臂管,10为内臂管,11为横向铰链,12为锁套,13为喷头,14为雷达,15为半导体制冷片, 16为散热片,17为脚架,18为套筒,19为缓冲胶套,20为发动机, 21为油箱。
具体实施方式
[0019]
下面结合附图与具体实施方式对本实用新型作进一步详细描述。
[0020]
本实施例,参照图1-图3,其具体实施的混合动力驱动无人机包括机体、药箱2、药泵3、电池4、电控盒和摄像机5,机体由四根结构相同的机臂和设置于机臂外末端带旋翼的电机组件构成,每个电机组件、药泵3、电池4及摄像机5均与电控盒进行电性连接。电机组件由电机座6、电机和两片桨叶7构成,电机座6安装在外臂管9远离内臂管10的末端,两片桨叶7均通过桨夹8进行安装,桨夹8可带动两片桨叶7旋转至同一方向,当需要进行收纳时,可直接将两片桨叶7旋转至同一方向,可减少桨叶7所占用的空间,便于包括、携带和运输。
[0021]
机体的中心设有中心支架1,中心支架1的内部设有用于安装电控盒的容纳腔,药箱2设置于中心支架1的顶面,中心支架1由上中心板、下中心板和侧板构成,上中心板和下中心板均平行于水平面,容纳腔位于上中心板与下中心板之间,侧板上留有四个用于固定安装机臂的侧孔。
[0022]
机臂由外臂管9和内臂管10构成,外臂管9和内臂管10连接成一直线,内臂管10的内侧端固定在中心支架1的侧面,外臂管9与内臂管10之间通过可水平折叠的横向铰链11进行连接,并在外臂管 9与内臂管10之间设有用于锁紧横向铰链11的锁套12,外臂管9远离内臂管10的末端底部设有向下延伸的喷头13,药泵3的抽水端和出水端均通过药管分别与药箱2和喷头13连接,外臂管9和内臂管 10均为中空结构,药管布设于外臂管9和内臂管10的内部。中心支架1的底部设有向下延伸的支撑板,摄像机5和药泵3均固定安装在支撑板上,并在支撑板上还设置有雷达14。
[0023]
另外,内臂管10远离外臂管9的一端表面设有半导体制冷片15,半导体制冷片15其中一面为制冷面,半导体制冷片15另一面为制热面,半导体制冷片15的制冷面紧贴着内臂管10表面,并在半导体制冷片15的制热面设置有散热片16。设置半导体制冷片15可对电机组件进行散热,通过热传导的方式给电机组件进行快速降温,而且半导体制冷片15所产生的热量通过散热片16进行快速散热,使内臂管10上不堆积任何热量,从而提高无人机的续航时间。
[0024]
中心支架1的底部设有发动机20和两根呈八字形对称向下延伸的脚架17,并在两根脚架17之间固定安装有油箱21,电池4固定安装于油箱21的顶部,油箱21通过油泵及油管与发动机20连接,且发动机20与电控盒进行电性连接,电控盒内设置有电源切换模块,发动机20和电池4均用于给无人机供电,当发动机20工作异常,如功率不足、熄火、燃料耗尽时,将会自动控制切换至电池4稳定供电模式,确保无人机能够持续正常飞行,从而可提高无人机飞行的稳定性及续航时间。中心支架1的底部设有四个用于安装脚架17且开口向下的套筒18,每根脚架17均由中空管折弯成型构成,中空管的两末端均向上,且配对插入两个套筒18内,中空管的底部两末端向下凹陷形成接触部,并在接触部上设有缓冲胶套19,两根中空管的中部通过底板进行连接,油箱21固定安装在底板的顶面。
[0025]
以上内容是结合具体的优选实施例对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1