一种无人机挂载式远程投放装置及投放方法与流程
本发明属于无人机投放,尤其涉及一种无人机挂载式远程投放装置及投放方法。
背景技术:
1、无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作;无人机在许多领域都得到了广泛的应用,例如高空投弹、喷洒农药、定点投送物资等等。
2、现有技术中,无人机空投技术通过由两种方式进行:
3、第一种,通过吊运的方式对空头箱进行输送,最后取消吊运,空投箱通过降落伞落在指定位置区域;
4、第二种,通过将箱装载于投射装置内,先通过打开开合门,然后再通过发射装置将箱发射,空投箱通过降落伞落在指定位置区域。
5、上述第一种方式,容易导致空投箱在运输过程中受到外界影响,遭受破坏损坏,而第二种方式,需要搭载过多的电气部件来实现相应的功能,导致体积较大,对无人机的要求较为严格。
6、因此,如何提供一种无人机挂载式远程投放装置及投放方法是本领域技术人员亟需解决的问题。
技术实现思路
1、本发明的目的在于提供一种无人机挂载式远程投放装置及投放方法,旨在解决背景技术中所提到的问题。
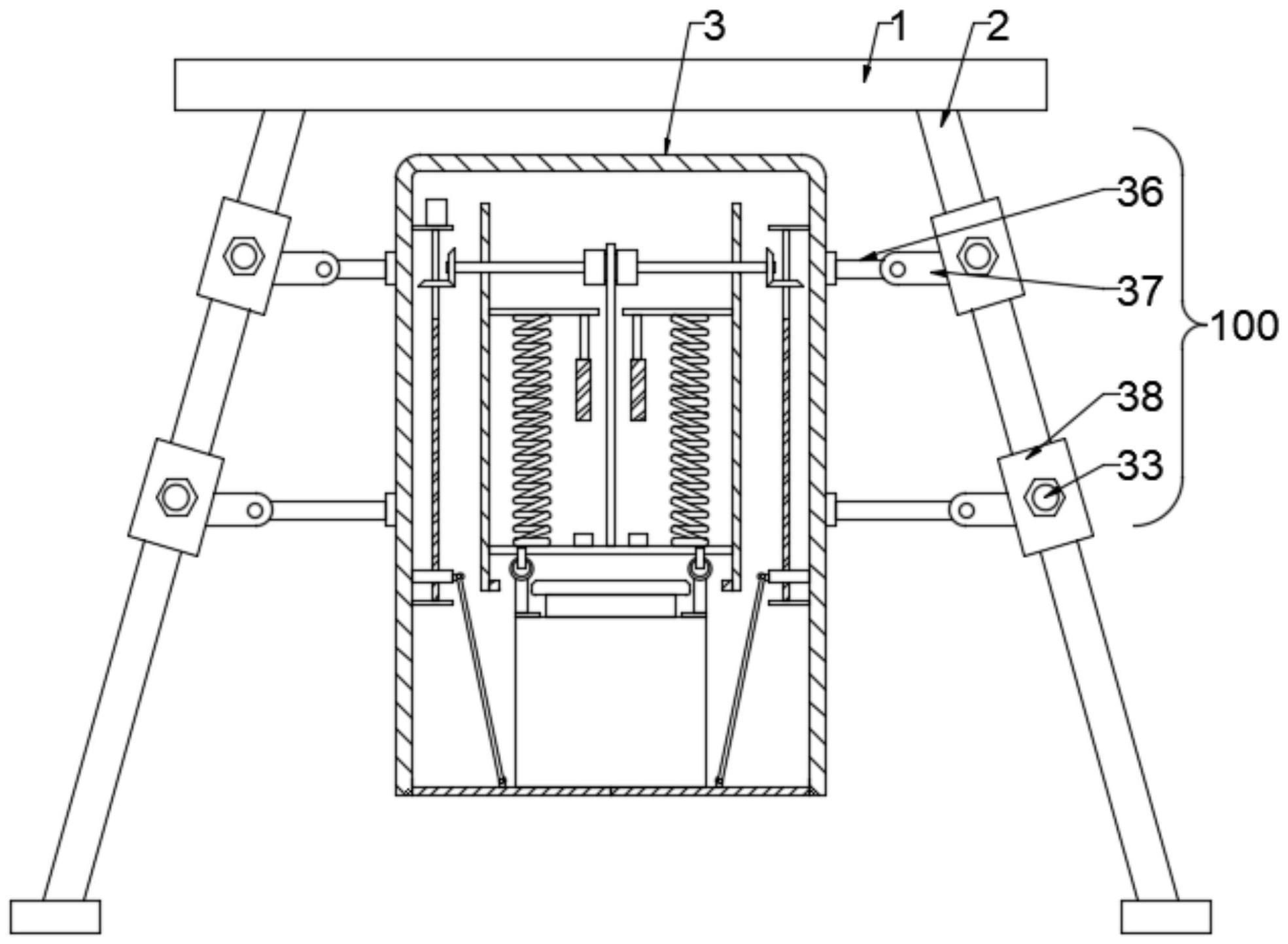
2、本发明是这样实现的,一种无人机挂载式远程投放装置,所述装置包括固定底座、支腿、物资箱和降落伞,所述装置还包括:
3、空投箱,所述空投箱通过安装机构安装于支腿上;
4、第一固定板,所述第一固定板固定于空投箱内且设置有两个;
5、移动板,所述移动板与第一固定板、空投箱贴合滑动;
6、定位块,所述定位块固定于第一固定板的下端,所述定位块用于对移动板限位;
7、第二固定板,所述第二固定板固定于两个第一固定板之间;
8、第一弹性件,所述第一弹性件两端分别与移动板、第二固定板固定连接;
9、第一转轴,所述第一转轴与第一固定板转动连接,所述第一转轴上设置有驱动移动板移动的间断提升机构;
10、开合门,所述开合门设置于空投箱的下端;
11、固定架,所述固定架固定于物资箱上;
12、中空套,所述中空套固定于固定架上;
13、所述移动板上设置有用于自动固定中空套的触发式固定机构;
14、所述空投箱内设置有与第一转轴相连接,且用于驱动开合门开合的翻转机构。
15、优选地,所述间断提升机构包括:
16、卷绕轮,所述卷绕轮转动设置于第一转轴上;
17、绳索,所述绳索两端分别与卷绕轮、移动板固定连接;
18、卡接组件,所述卡接组件弹性滑动设置于第一转轴内,且部分嵌套于卷绕轮内。
19、优选地,所述卡接组件包括:
20、卡接块,所述卡接块与第一转轴滑动连接,所述卡接块的一端为圆弧状且部分嵌套于卷绕轮内;
21、第一限位滑块,所述第一限位滑块与第一转轴滑动连接,所述第一限位滑块的外径大于卡接块的外径且与其固定连接;
22、第二弹性件,所述第二弹性件两端分别与第一转轴内壁、第一限位滑块固定连接。
23、优选地,所述翻转机构包括:
24、第一螺杆,所述第一螺杆转动设置于空投箱的内壁上;
25、滑座,所述滑座与第一螺杆螺纹连接,所述滑座与空投箱内壁贴合滑动;
26、第一连接杆,所述第一连接杆两端分别与滑座、开合门铰接;
27、齿轮副,所述齿轮副分别与第一螺杆、第一转轴连接;
28、动力组件,用于驱动第一螺杆旋转。
29、优选地,所述动力组件包括:
30、第二转轴,所述第二转轴与第一螺杆同轴固定;
31、驱动电机,所述驱动电机用于驱动第二转轴旋转。
32、优选地,所述触发式固定机构包括:
33、滑杆,所述滑杆设置有两个且分别与移动板的两端滑动连接;
34、第二限位滑块,所述第二限位滑块的外径大于滑杆的外径,所述第二限位滑块与移动板滑动连接且于滑杆固定连接;
35、第二连接杆,所述第二连接杆固定于滑杆位于移动板外的一端上;
36、插杆,所述插杆固定于第二连接杆的一侧,所述插杆的下侧设置有与第二连接杆配合的滑动斜面;
37、第三弹性件,所述第三弹性件两端分别与第二限位滑块、移动板内壁固定连接;
38、螺套,所述螺套与移动板转动连接;
39、对称偏心轮,所述对称偏心轮安装于螺套上,所述对称偏心轮抵接于第二限位滑块;
40、驱动组件,所述驱动组件用于驱动螺套旋转。
41、优选地,所述驱动组件包括:
42、引导杆,所述引导杆固定于第二固定板上;
43、第二螺杆,所述第二螺杆与引导杆滑动连接,所述第二螺杆与螺套相配合。
44、优选地,所述安装机构包括:
45、伸缩杆,所述伸缩杆固定于空投箱的外壁上,所述伸缩杆的数量与支腿相同且与其一一对应;
46、滑套,所述滑套套设于支腿上;
47、铰接架,所述铰接架固定于滑套上,所述铰接架与伸缩杆一端转动连接;
48、紧固组件,所述紧固组件用于固定滑套和支腿。
49、为实现上述目的,本发明提供的无人机挂载式远程投放方法,具体包括以下步骤:
50、s1、将物资箱从两个开合门之间装入到空投箱内,通过移动板上的触发式固定机构对物资箱固定,继续推动移动板至预定位置,接着通过翻转机构驱动开合门翻转复位,从而闭合,而移动板也在第二固定板的弹力作用下复位至物资箱落在开合门内壁上;
51、s2、通过遥控器启动无人机,无人机带动固定底座、支腿、安装机构和空投箱移动,当无人机移动至预定位置时,通过启动翻转机构运行,一方面翻转机构带动开合门向空投箱内侧翻转,而另一方面,翻转机构带动第一转轴旋转,第一转轴通过间断提升机构带动移动板移动,移动板带动物资箱移动,从而避免开合门的翻转,当移动板移动至预定位置后,第一弹性件无法压缩,此时触发式固定机构松开对中空套的固定,中空套从而两个开合门之间掉落,完成对物资箱的空投操作;
52、s3、空投后,通过遥控器控制无人机返还,重复上述s1和s2的操作步骤。
53、与现有技术相比,本发明的有益效果是:无人机的底部一般需要固定固定底座和支腿,以便于无人机的发射与下降,因此安装机构可以便于将空投箱固定,当使用本投放装置时,通过启动翻转机构,一方面翻转机构驱动开合门开合,开合门向空投箱内侧开合,开合门挤压物资箱,而物资箱受到挤压,另一方面,翻转机构驱动第一转轴旋转,第一转轴通过间断提升机构驱动移动板上升,移动板通过触发式固定机构带动中空套、降落伞和物资箱沿着第一固定板向上滑动,当开合门翻转至,物资箱能够从两个开合门掉落的位置时,此时触发式固定机构停止固定中空套,而中空套在重力作用下,从两个开合门之间的位置掉落出空投箱,从而达到空投的目的,并且此时间断提升机构停止驱动移动板移动,在第一弹性件的弹力作用下,第一弹性件驱动移动板下降复位,便于下一次对新的物资箱固定,操作简单方便,并且开合门的开合与物资箱的投放之间具有联动效果,无需电气部件的控制驱动
- 还没有人留言评论。精彩留言会获得点赞!