一种植保无人机用自适应喷雾装置及喷施策略
本发明涉及植保无人机相关,特别涉及一种植保无人机用自适应喷雾装置及喷施策略,用于增加药液喷洒的覆盖范围、均匀程度及沉积效果,属于农业植保。
背景技术:
1、农作物病虫害是农业生产持续稳定发展的主要制约因素之一,随着科技发展,利用无人机可以辅助甚至代替人工完成田间作业;而多旋翼无人机具有操纵方便、适应力强的特点,能够稳健可靠的完成植保任务,以此成为了目前植保无人机的主要形式。
2、农田地形环境多样,农田及周围环境可能出现各种障碍物干扰植保无人机施药效果;当植保无人机遇到障碍物时通常绕行实现避障,此时植保无人机所喷射的雾滴不足以完全覆盖避障区域,还需要人工补喷以保证病虫害防治效果。且田间农作物受多重因素影响,其外形特征、疏密情况、病虫害侵蚀程度存在差异,植保无人机通常无法准确区分目标对象,只能以同等的喷施方式进行植保作业,造成农作物长势稠密或受病虫害严重的区域喷施效果偏差。现有技术中植保无人机喷雾装置只单纯考虑调整喷射范围或喷洒角度某一功能,并未考虑在调整喷幅与喷洒角度的过程中,无人机旋翼风场对喷施效果产生的反向影响,以及喷洒角度过大会削弱有效喷射范围、雾滴穿透性能强弱对病虫害防治的影响等问题,无法保障田间精准高效喷施;本发明提出一种植保无人机用自适应喷雾装置及喷施策略,自适应喷雾装置可实现喷幅大小与喷洒角度的实时调整与匹配,不仅可以使喷头始终朝向目标范围,还能让喷洒的中心位置持续对准农作物稠密或受病虫害影响严重的区域,以此提高无人机施药精准度,同时减少农药浪费,保障喷雾效率;此外本发明通过在喷杆上设置随动桨叶,利用随动桨叶产生的风场,降低喷头摆动与喷施作业时,药液喷洒受到无人机旋翼在垂直方向上风场的影响。
技术实现思路
1、本发明提出一种植保无人机用自适应喷雾装置及喷施策略,以解决现有技术中植保无人机作业过程,田间农作物容易受多重因素影响,导致其外形特征、疏密情况、病虫害侵蚀程度存在差异,不能精准区分目标对象,只能以相同的喷施方式进行植保作业,造成农作物长势稠密或受病虫侵害严重的区域喷施效果偏差。现有技术中植保无人机用喷雾装置,并未考虑在调整喷幅大小或喷洒角度的过程中,无人机旋翼风场对喷施效果产生的反向作用,以及喷洒角度过大会削弱有效喷射范围、雾滴穿透性能强弱对病虫害防治的影响等问题,不能保障田间精准高效喷施。
2、为了实现上述目的,本发明采用如下技术方案:
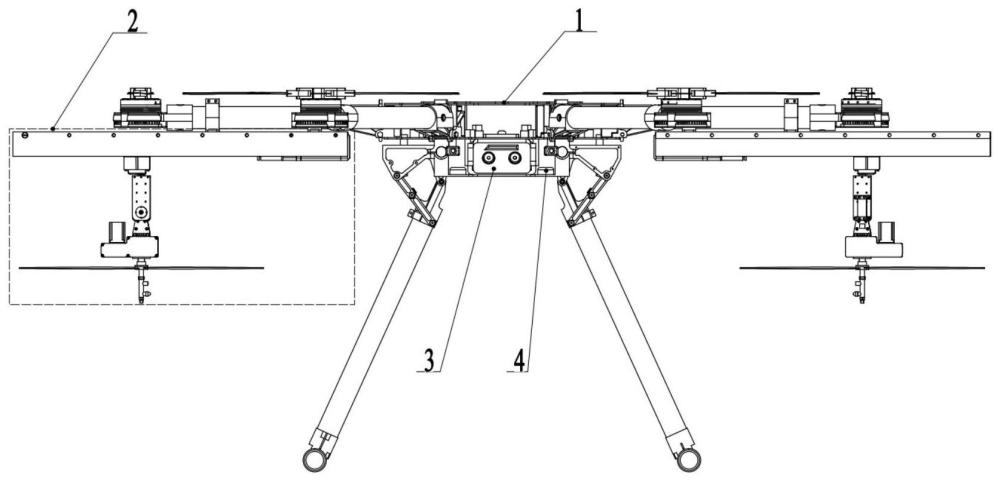
3、一种植保无人机用自适应喷雾装置,其特征包括:多旋翼植保无人机上安装有可拆卸的自适应喷雾装置,并能配合无人机上搭载的激光雷达和多光谱相机等设备,完成喷头的自适应喷洒作业;所述自适应喷雾装置,通过两个安装座,固定于无人机中部位置机臂上,相应控制与监测模块安装于无人机下方位置的载物架上,实现调控农作物喷施作业参数的功能。
4、优选的,所述自适应喷雾装置,包括直线模组、旋转机构、摆动机构、机箱、喷头、随动桨叶及传感元件;所述直线模组上端设有两个安装座,其下端连接旋转机构,所述摆动机构安装在旋转机构下端,且在摆动机构下端安装有机箱,桨叶和喷杆,所述喷头安装在喷杆下方。
5、优选的,所述直线模组,包括基座、挡板、减速电机、电机座、联轴器、前轴承座、丝杠、螺母、工作台、后轴承座、缓冲垫、直线导轨、滑块及距离传感器;所述基座表面开设有安装凹槽和螺纹孔,用于安装电机座、左右轴承座和直线导轨,且在基座左右两端安装有挡板;所述减速电机安装在电机座左端,丝杠安装在左右轴承座中间,且丝杠左端通过联轴器与减速电机电性连接;所述直线导轨通过螺钉固定于基座的安装台上,并与滑块配合形成滑动副;所述工作台中间孔位置安装有与丝杠机械配合的螺母,工作台两端内侧位置通过螺钉与滑动副连接;当电机转动时带动丝杠螺母运动,从而使工作台做直线往复运动,所述直线导轨滑块能够保证工作台的运动精度与平稳性。
6、优选的,所述旋转机构,包括舵机座ⅰ、舵机ⅰ、舵盘ⅰ、大臂底座、大臂左右板和大臂支撑杆;所述舵机座上端通过螺钉固定在工作台上,并与工作台同步运动,中间位置安装有舵机,舵机输出轴上配合有舵盘;所述大臂底座的下端位置,通过螺钉与舵盘ⅰ连接,当舵机运动时可带动大臂底座旋转;所述大臂左右板分别安装在大臂底座两侧位置,并且在其表面开有螺纹孔,下方位置设计轴承安装孔,安装在大臂左右板中间的六个大臂支撑杆,能够保证大臂连接结构整体的稳固。
7、优选的,所述摆动机构,包括舵机座ⅱ、舵机ⅱ、舵盘ⅱ、摆动臂、大臂端盖和小臂支撑杆;所述舵机座固定在大臂左板上,舵机通过螺钉安装于舵机座上,舵机输出轴上安装有一个与轴承相配合的舵盘,舵盘与摆动臂右臂连接,形成右臂主动旋转结构;摆动臂左臂连接一个与轴承相配合的舵盘,再通过安装在大臂左板上的端盖进行限位,形成左臂随动旋转结构;摆动臂中间部位有四个小臂支撑杆,用于加强小臂的强韧度和稳固性,此时舵机可通过舵盘控制摆动臂运动。
8、优选的,所述监测模块,包括一组距离传感器和两组角度传感器;其中距离传感器安装在前轴承座右侧,用于检测喷雾装置自适应调整过程中,喷头的横向移动距离;两组角度传感器分别安装在旋转座与摆动臂上,用于监控旋转机构的旋转角度与摆动机构的摆动角度,并可将监测数据实时传输至控制单元进行反馈调节。
9、优选的,所述机箱,包括箱盖、箱体、电机、主动轮、从动轮、空心轴、法兰与轴上配件;所述箱盖与箱体端面设有螺纹孔,可通过螺钉使箱盖与箱体组成完整机箱;机箱内部设计的安装孔,用于实现轴上零件的支撑和限位,机箱周围设计的安装孔,通过螺栓连接于摆动臂下方;机箱内部有一对啮合齿轮副,所述电机通过法兰ⅰ电性连接,为啮合齿轮副的主动轮提供动力,从动轮随着主动轮一起转动;所述空心轴安装在从动轮中心同步转动,通过套筒与端盖对安装在轴上的齿轮与轴承定位,保证整个机箱的传动平稳与精密;所述空心轴下端通过法兰ⅱ连接有随动桨叶,其中心位置套有一个安装在摆动臂下端的喷杆,整个机箱为随动桨叶的旋转提供动力来源。
10、优选的,所述一种自适应喷雾装置,采用闭环控制方法实现变量喷雾,相比较传统的喷雾,该喷雾装置可以根据田间作业需求、无人机与障碍物相对距离,农作物多重特征及受病虫侵害严重程度等,结合智能控制与修正理论,实时自适应调整装置喷射范围、喷头喷洒角度及随动桨叶转速,以减少无人机漏喷、错喷或喷洒不均匀等问题,并减少药液浪费情况的发生,提升药液有效覆盖面积,增强药液穿透度和利用率。
11、优选的,在自适应喷雾装置中,喷头直线移动情况不变的条件下,喷头的侧喷角度可通过三种方式实现。一是固定旋转机构,只由摆动机构带动喷头,在有效喷幅的角度范围内摆动;二是选择合适的喷头摆动角度固定,只由旋转机构带动喷头,通过旋转的方式改变喷头侧喷角度;三是旋转机构与摆动机构协调配合,优化并调整喷头的侧喷角度。
12、优选的,植保无人机根据田间处方图ndvi(植被指数)生成作业参数(飞行参数、喷洒参数),在田间喷雾过程中,无人机本体和外部多重环境变换,会导致处方信息与实际工况发生偏差,本发明通过多光谱相机对农作物属性及受病虫损害严重程度进行检测,并实时传输至控制系统,控制系统根据14所述方式,自适应调节无人机喷幅大小、喷洒角度及随动桨叶转速;再由距离和角度传感器将检测数据,实时反馈到控制系统,实时计算数据偏差并进行调节和修正,形成无人机与喷雾装置闭环控制,确保喷头始终朝向目标区域的基础上,让喷头的中心位置对准农作物稠密或受病虫损害严重的区域,以提高药液的利用率,实现农田精准施药目的。
13、优选的,植保无人机在作业过程中,遇到田间障碍物时,由激光雷达检测无人机与障碍物相对距离h反馈至控制系统进行判断是否达到避障距离hm,当时,无人机开始避障;同时,控制系统可根据避障距离x的大小,以14中所述的方式对喷雾装置的作业参数进行调整,并通过距离、角度传感器对作业参数进行实时检测,然后反馈到控制系统计算偏差,便于及时矫正,以此循环形成闭环控制,提高整个系统的控制精度,确保喷头始终朝向目标区域喷洒药液。
14、采用本发明提供的技术方案,与现有技术相比,具有以下有益收益:
15、本发明所述一种植保无人机用自适应喷雾装置及喷施策略,通过控制单元与喷施策略,结合激光雷达与多光谱相机,完成目标对象的距离判断,然后控制直线模组,动态调整植保无人机的喷幅大小;当无人机遇到障碍物,可根据避障航线,以及无人机与障碍物的相对距离,自适应调整喷头角度,使喷洒方向始终朝着靶向区域。
16、本发明所述一种植保无人机用自适应喷雾装置及喷施策略,通过控制单元与喷施策略,根据处方图数据与多光谱相机实时监测,对田间农作物的外形特征、疏密程度、受病虫侵蚀严重程度等进行精准区分,确保喷头始终朝向目标区域的基础上,使喷头的中心位置始终能够对准农作物稠密或受病虫损害严重的区域,从而提高药液的利用率,实现农作物精准施药。
17、本发明所述一种植保无人机用自适应喷雾装置及喷施策略,通过在喷杆上设有随动桨叶,确保随动桨叶产生的风场与喷头喷洒方向始终一致,可降低喷头摆动作业时,喷洒效果受无人机旋翼在垂直方向上风场的影响,还能抑制喷头因摆动角度过大发生的雾滴飘移现象;当喷头与无人机旋翼共轴时,共轴双桨叶可增强垂直方向上的风场强度,提高药液的沉积效果和穿透效率。
- 还没有人留言评论。精彩留言会获得点赞!