旋转装置和分拣设备的制作方法
本公开涉及仓储物流领域,更具体地,涉及一种旋转装置和一种分拣设备。
背景技术:
随着科学技术的发展,各种机械设备不断更新迭代,很多机械设备中通常存在一些旋转结构,例如物流分拣机器人,分拣机器人包括底盘和位于底盘上方的分拣部件,分拣部件可相对于底盘转动,并在转动至指定方向时将物品卸下。
在实现本公开构思的过程中,发明人发现相关技术中至少存在如下问题:
旋转结构内含线缆时,线缆可能会由于连续扭转而损坏,例如,分拣机器人的底盘具有控制器,分拣部件具有滚动结构和传感器,控制器与滚动结构之间以及控制器与传感器之间连接有线缆,以进行指令和数据的传输。在分拣部件旋转时,会带动众多线缆扭绞在一起,旋转超过一圈可能就会引起线缆损坏。相关技术中使用导电滑环来解决这一问题,导电滑环可以实现连接线的n*360°旋转,但是导电滑环价格昂贵,会直接导致整个设备的成本大幅上升,且一些情况下无需连续转动,只需满足360度转动即可,导电滑环的使用造成性能过剩。
技术实现要素:
有鉴于此,本公开提供了一种旋转装置和一种分拣设备。
本公开的一个方面提供了一种旋转装置,包括:支撑部件;转盘,设置于所述支撑部件,并能够相对于所述支撑部件旋转;第一限位部件,连接于所述转盘并随所述转盘转动;以及第二限位部件,连接于所述支撑部件;在所述转盘沿第一方向旋转至第一角度的情况下,所述第一限位部件阻挡所述第二限位部件,以阻止所述转盘继续沿第一方向旋转;在所述转盘沿所述第一方向的反方向旋转至第二角度的情况下,所述第一限位部件阻挡所述第二限位部件,以阻止所述转盘继续沿所述第一方向的反方向转动。
根据本公开的实施例,所述支撑部件具有滑槽;所述第二限位部件设置于所述滑槽内并能够在所述滑槽的第一端和第二端之间滑动;在所述第一限位部件沿所述第一方向或者沿所述第一方向的反方向转动至所述滑槽的情况下,所述第一限位部件能够推动所述第二限位部件在所述滑槽内滑动。
根据本公开的实施例,在所述第一限位部件沿所述第一方向旋转至所述滑槽的情况下,所述第一限位部件能够推动所述第二限位部件向所述滑槽的第二端滑动,直至所述所述第二限位部件滑动至所述第二端,所述转盘旋转至所述第一角度;在所述第一限位部件沿所述第一方向的反方向旋转至所述滑槽的情况下,所述第一限位部件能够推动所述第二限位部件向所述滑槽的第一端滑动,直至所述所述第二限位部件滑动至所述第一端,所述转盘旋转至所述第二角度。
根据本公开的实施例,所述转盘位于所述第一角度时,所述第一限位结构相对于所述支撑部件的位置与所述转盘位于所述第二角度时所述第一限位结构相对于所述支撑部件的位置相同。
根据本公开的实施例,所述第二限位部件包括阻挡部和滑动部,所述滑动部位于所述滑槽中,所述滑动部表面套设衬套,所述滑动部底部靠近所述衬套的位置设置卡环。
根据本公开的实施例,所述转盘设置有贯穿所述转盘的第一插孔;所述支撑部件设置有与所述第一插孔对应的第二插孔;在所述转盘转动至第三角度的情况下,所述第一插孔与所述第二插孔对齐,以在所述第一插孔和所述第二插孔中插入销轴。
根据本公开的实施例,所述旋转装置还包括:驱动部件,固定于所述支撑部件;以及传动齿轮,固定于所述支撑部件,并与所述驱动部件的输出轴固定连接,以在所述驱动部件的驱动下旋转,所述转盘包括层叠设置的齿圈和托盘,所述齿圈与所述传动齿轮啮合,所述托盘与所述齿圈固定连接并与所述齿圈同轴,所述托盘用于连接被动部件,以带动所述被动部件旋转。
根据本公开的实施例,所述旋转装置还包括:底板;处理器,连接于所述底板;以及驱动轮系,连接于所述底板两侧,所述支撑部件包括顶板和多个侧板,所述多个侧板围成两侧开口的容置空间,所述顶板设置于所述容置空间的一侧开口处并与所述多个侧板连接;所述支撑部件固定于所述底板中部,所述多个侧板与所述底板固定连接。
根据本公开的实施例,所述顶板包括连接板和支撑环,所述连接板用于连接所述多个侧板,所述支撑环凸出于所述顶板表面;所述旋转装置还包括轴承部件,所述轴承部件套设于所述支撑环和所述齿圈之间;所述连接板具有第一通孔,所述托盘具有第二通孔,所述第一通孔、支撑环的中空通道与所述第二通孔对齐,以穿设用于连接所述处理器与所述被动部件的线缆。
本公开的另一个方面提供了一种分拣设备,包括:分拣部件;以及旋转装置,包括:支撑部件;转盘,设置于所述支撑部件,并能够相对于所述支撑部件旋转;第一限位部件,连接于所述转盘并随所述转盘转动;以及第二限位部件,连接于所述支撑部件,在所述转盘沿第一方向旋转至第一角度的情况下,所述第一限位部件阻挡所述第二限位部件,以阻止所述转盘继续沿第一方向旋转;在所述转盘沿所述第一方向的反方向旋转至第二角度的情况下,所述第一限位部件阻挡所述第二限位部件,以阻止所述转盘继续沿所述第一方向的反方向转动。
根据本公开的实施例,至少部分地克服了现有技术中由于旋转结构中的线缆连续扭转而造成损坏以及由于导电滑环的使用而造成性能过剩成本过高的技术问题,进而达到了既能满足设备朝向不同方向的需求,又可以避免由于线缆扭转角度过大而造成损坏的情况、以及大幅降低设备成本的技术效果。
附图说明
通过以下参照附图对本公开实施例的描述,本公开的上述以及其他目的、特征和优点将更为清楚,在附图中:
图1a和图1b示意性示出了根据本公开实施例的可以应用旋转装置的示例性应用场景;
图2示意性示出了根据本公开实施例的旋转装置的结构示意图;
图3示意性示出了根据本公开实施例的支撑部件的结构示意图;
图4示意性示出了根据本公开实施例的转盘的结构示意图;
图5示意性示出了根据本公开实施例的转盘与支撑结构连接的示意图;
图6a和图6b示意性示出了根据本公开实施例的滑槽与第二限位部件连接的示意图;
图7a示意性示出了根据本公开实施例的第二限位部件位于滑槽第二端的示意图;
图7b示意性示出了根据本公开实施例的第二限位部件位于滑槽第一端的示意图;
图8示意性示出了根据本公开另一实施例的旋转装置的结构示意图;
图9示意性示出了根据本公开另一实施例的旋转装置的结构示意图;
图10a、图10b和图10c示意性示出了根据本公开实施例的扫描部件的示意图;
图11示意性示出了根据本公开实施例的底板的底面的结构示意图;
图12a示意性示出了根据本公开实施例的分拣设备的结构示意图;以及
图12b示意性示出了根据本公开实施例的分拣设备300的部分结构示意图。
具体实施方式
以下,将参照附图来描述本公开的实施例。但是应该理解,这些描述只是示例性的,而并非要限制本公开的范围。在下面的详细描述中,为便于解释,阐述了许多具体的细节以提供对本公开实施例的全面理解。然而,明显地,一个或多个实施例在没有这些具体细节的情况下也可以被实施。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本公开的概念。
在此使用的术语仅仅是为了描述具体实施例,而并非意在限制本公开。在此使用的术语“包括”、“包含”等表明了所述特征、步骤、操作和/或部件的存在,但是并不排除存在或添加一个或多个其他特征、步骤、操作或部件。
在此使用的所有术语(包括技术和科学术语)具有本领域技术人员通常所理解的含义,除非另外定义。应注意,这里使用的术语应解释为具有与本说明书的上下文相一致的含义,而不应以理想化或过于刻板的方式来解释。
在使用类似于“a、b和c等中至少一个”这样的表述的情况下,一般来说应该按照本领域技术人员通常理解该表述的含义来予以解释(例如,“具有a、b和c中至少一个的装置”应包括但不限于单独具有a、单独具有b、单独具有c、具有a和b、具有a和c、具有b和c、和/或具有a、b、c的装置等)。在使用类似于“a、b或c等中至少一个”这样的表述的情况下,一般来说应该按照本领域技术人员通常理解该表述的含义来予以解释(例如,“具有a、b或c中至少一个的装置”应包括但不限于单独具有a、单独具有b、单独具有c、具有a和b、具有a和c、具有b和c、和/或具有a、b、c的装置等)。
本公开的实施例提供了一种旋转装置,该旋转装置包括支撑部件、转盘、第一限位部件和第二限位部件。转盘设置于支撑部件,并能够相对于支撑部件旋转。第一限位部件连接于转盘并随转盘转动。第二限位部件连接于支撑部件。在转盘沿第一方向旋转至第一角度的情况下,第一限位部件阻挡第二限位部件,以阻止转盘继续沿第一方向旋转。在转盘沿第一方向的反方向旋转至第二角度的情况下,第一限位部件阻挡第二限位部件,以阻止转盘继续沿第一方向的反方向转动。
图1a和图1b示意性示出了根据本公开实施例的可以应用旋转装置的示例性应用场景。需要注意的是,图1所示仅为可以应用本公开实施例的应用场景的示例,以帮助本领域技术人员理解本公开的技术内容,但并不意味着本公开实施例不可以用于其他设备、系统、环境或场景。
如图1a和图1b所示,本公开实施例的旋转装置例如可以应用于分拣机器人110,分拣机器人110可以包括底盘111和位于底盘上方的分拣部件112,分拣部件112能够相对于底盘111转动,本公开实施例的旋转装置可以设置于分拣机器人的底盘111,旋转装置的转盘可以与分拣部件112固定连接,具体地,旋转装置的转盘和分拣部件112之间还可以设置支撑筒113,支撑筒113的底部与转盘固定连接,支撑筒113的顶部与分拣部件112固定连接,这样,转盘可以带动分拣部件112转动。
底盘111上可以设置处理器和驱动轮,以使分拣机器人110能够按照预定路线行走。分拣部件112例如可以包括滚筒皮带模组和用于检测皮带上有无货物的光电对射传感器,滚筒皮带模组与底盘上的处理器之间以及传感器处理器之间连接有线缆,线缆可以穿设于支撑筒113中。在分拣机器人101运动至目标位置时,处理器可以控制分拣部件112旋转至目标方向,并驱动滚筒皮带模组运转,以将物品120放入目标区域130,实现物品分拣的目的。
可以理解,图1a和图1b中的应用场景仅是一种示例,该旋转装置除了可以应用于分拣机器人之外,还可以应用于其他设备中。
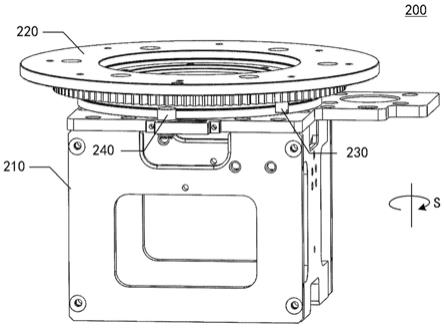
图2示意性示出了根据本公开实施例的旋转装置200的结构示意图。
如图2所示,该旋转装置200包括支撑部件210、转盘220、第一限位部件230和第二限位部件240。转盘220设置于支撑部件210,并能够相对于支撑部件旋转。第一限位部件230连接于转盘220并随转盘220转动。第二限位部件240连接于支撑部件210。
图3示意性示出了根据本公开实施例的支撑部件的结构示意图。
如图3所示,在本公开实施例中,支撑部件例如可以是框架结构,可以包括顶板211和多个侧板212,多个侧板212围成两侧开口的容置空间,顶板211设置于容置空间的一侧开口处并与多个侧板212固定连接。例如,支撑部件可以包括固定连接的四个侧板212,围成四方形框架,顶板211固定连接于四个侧板212的顶部。
转盘可以连接于顶板211上,为了便于使顶板211与转盘连接,顶板211可以包括固定连接的连接板2111和支撑环2112,连接板2111可以与多个侧板212连接,支撑环2112凸出于连接板的2111的表面,转盘可以套设于支撑环2112的外部。
在本公开其他实施例中,支撑部件也可以呈其他形状,或者也可以是除框架结构外的其他支撑结构。
根据本公开的实施例,第二限位部件240连接于支撑部件,第二限位部件240例如可以设置于顶板211的一侧。
图4示意性示出了根据本公开实施例的转盘的结构示意图。
如图4所示,转盘220例如可以包括层叠设置的齿圈221和托盘222,托盘222与齿圈221固定连接并与齿圈221同轴。托盘222可以固定于齿圈221的上方,托盘222的中心区域设置有贯穿托盘的通孔,托盘222的通孔与齿圈221的中心孔相对应。
托盘222可以用于连接被动部件,以带动被动部件旋转。例如,托盘222可以用于连接分拣机器人的分拣部件,带动分拣部件旋转。
根据本公开的实施例,第一限位部件230连接于转盘并随转盘转动,例如可以固定于齿圈221的底面,相对于齿圈221的底面向下凸出。
图5示意性示出了根据本公开实施例的转盘与支撑结构连接的示意图。
如图5所示,齿圈221可以套设于支撑环2112的外部。并且,旋转装置还可以包括轴承部件251,轴承部件251例如可以是深沟球轴承,轴承部件251可以套设于支撑环2112和齿圈221之间,以使齿圈221稳固地连接于顶板上,且能够相对于顶板自如地转动。齿圈221与轴承部件251的外圈固定连接,支撑环2112与轴承部件251的内圈固定连接。
齿圈221的下方还可以设置轴承外圈压盖252,轴承外圈压盖252可以与齿圈221固定连接,轴承外圈压盖252和齿圈221共同固定住轴承部件251的外圈。支撑环2112的上方还可以设置轴承内圈压盖253,轴承内圈压盖253可以固定于支撑环2112的上端面,用于压住轴承部件251的内圈。
如上所述,根据本公开的实施例,支撑部件的顶板上具有第一通孔,托盘具有第二通孔,第一通孔与第二通孔对齐,以穿设用于连接处理器与被动部件的线缆。例如,处理器与分拣部件之间的线缆可以通过第一通孔和第二通孔穿入位于转盘上方的支撑筒中。
请复参见图2,在转盘220沿第一方向旋转至第一角度的情况下,第一限位部件230阻挡第二限位部件240,以阻止转盘220继续沿第一方向旋转。例如,第一方向为图示的顺时针方向s,转盘220沿顺时针旋转,第一限位部件230随转盘220沿顺时针方向转动,直至第一限位部件230转动至第二限位部件240的右侧并与之接触,第二限位部件240可以阻挡住第一限位部件230继续沿顺时针转动,阻止转盘220继续沿顺时针旋转。
在转盘220沿第一方向的反方向旋转至第二角度的情况下,第一限位部件230阻挡第二限位部件240,以阻止转盘220继续沿第一方向的反方向旋转。例如,第一方向的反方向为逆时针方向,转盘220沿逆时针旋转,第一限位部件230随转盘220沿逆时针方向转动,直至第一限位部件230转动至第二限位部件240的左侧并与之接触,第二限位部件240可以阻挡住第一限位部件230继续沿顺时针转动,阻止转盘220继续沿顺时针旋转。
根据本公开的实施例,在转盘上设置第一限位部件,在支撑部件上设置第二限位部件,可以使转盘的旋转角度限制在360°以内,进而使与转盘连接的被转动部件的旋转角度限制在360°以内,既能满足分拣部件等被转动部件朝向不同方向的需求,又可以避免由于线缆扭转角度过大而造成损坏的情况,并且结构简单,成本低廉。
若第二限位部件240与支撑部件固定连接,由于第一限位部件230和第二限位部件240存在一定的厚度,因而第一限位部件230的转动角度会略小于360°,即转盘的旋转角度略小于360°。因而,本公开的实施例还提供了一种可以实现转盘360°旋转的结构,具体如下所述。
请复参见图3,支撑部件可以具有滑槽213,第二限位部件240可以设置于滑槽213内并能够在滑槽213的第一端和第二端之间滑动。
图6a和图6b示意性示出了根据本公开实施例的滑槽与第二限位部件连接的示意图。
结合图6a和图6b所示,根据本公开的实施例,第二限位部件240可以包括阻挡部和滑动部,阻挡部可以是指第二限位部件240上位于滑槽213上方的部分,滑动部可以是指位于滑槽213中的部分,滑动部的直径可以小于阻挡部的直径。滑动部表面可以套有衬套241,以避免滑动部表面与滑槽表面直接接触,减少磨损。滑动部的底部靠近衬套240的位置设置卡环242,卡环242例如可以是轴卡簧,以卡住衬套241。衬套240的底部和卡环242之间还可以设置垫环243。
根据本公开的实施例,在第一限位部件230沿第一方向或者沿第一方向的反方向转动至滑槽213的情况下,第一限位部件230能够推动第二限位部件240在滑槽213内滑动。
图7a示意性示出了根据本公开实施例的第二限位部件位于滑槽第二端的示意图。
如图7a所示,根据本公开的实施例,在第一限位部件230沿第一方向旋转至滑槽213的情况下,第一限位部件230能够推动第二限位部件240向滑槽的第二端滑动,直至第二限位部件240滑动至滑槽的第二端,转盘220旋转至第一角度。
例如,第一限位部件230沿顺时针方向转动至第二限位部件240的右侧并与之接触后,第一限位部件230可以推动第二限位部件240向左侧移动直至第二限位部件240移动至滑槽213的左端,第二限位部件240不能继续向左侧移动,进而阻挡第一限位部件230继续沿顺时针方向转动。
图7b示意性示出了根据本公开实施例的第二限位部件位于滑槽第一端的示意图。
如图7b所示,在第一限位部件230沿第一方向的反方向旋转至滑槽213的情况下,第一限位部件230能够推动第二限位部件240向滑槽213的第一端滑动,直至第二限位部件240滑动至第一端,转盘220旋转至第二角度。
例如,第一限位部件230沿逆时针方向转动至第二限位部件240的左侧并与之接触后,第一限位部件230可以推动第二限位部件240向右侧移动直至第二限位部件240移动至滑槽213的右端,第二限位部件240不能继续向右侧移动,进而阻挡第一限位部件230继续沿逆时针方向转动。
根据本公开的实施例,转盘220位于第一角度时,第一限位部件相对于支撑部件的位置与转盘220位于第二角度时第一限位部件相对于支撑部件的位置相同。即,转盘220沿第一方向转动至极限位置时第一限位部件230所在的位置与转盘220沿第一方向的反方向转动至极限位置时第一限位部件230所在的位置相同,第一限位部件230朝向同一方向。这样,在转盘位于第一角度和第二角度时,分拣部件的朝向一致。
滑槽213的第一端至第二端的距离可以等于第二限位部件240的宽度的二倍与第一限位部件230的宽度的加和,这样,可以使转盘220沿第一方向转动转动至极限位置时,第二限位部件240位于滑槽的中部;转盘220沿第一方向的反方向转动转动至极限位置时,第二限位部件240同样位于滑槽的中部。
基于以上结构,可以实现转盘220的360°转动。若滑槽213的长度在此基础上略微加长,还可以使转盘220的旋转角度略微大于360°。
图8示意性示出了根据本公开另一实施例的旋转装置的结构示意图。
如图8所示,根据本公开的实施例,旋转装置还可以包括驱动部件261和传动齿轮262,驱动部件261例如可以是伺服电机。驱动部件261可以固定于支撑部件,例如可以固定于支撑部件的顶板的下方。传动齿轮262可以固定于支撑部件,例如可以固定于支撑部件的顶板的上方,传动齿轮262与驱动部件261的输出轴固定连接,以在驱动部件261的驱动下旋转。传动齿轮262可以与转盘上的齿圈相啮合,以使传动齿轮262驱动转盘转动。
根据本公开的实施例,转盘220上可以设置有贯穿转盘220的第一插孔223,第一插孔223例如可以贯穿托盘和齿圈。支撑部件上设置有与第一插孔223对应的第二插孔2113,第二插孔2113例如可以设置于顶板上。在转盘220转动至第三角度的情况下,第一插孔与第二插孔对齐,以在第一插孔223和第二插孔2113中插入销轴214。该第三角度例如可以是使第一限位部件背对第二限位部件的角度,由该第三角度开始沿顺时针方向旋转180°转至第一角度,沿逆时针方向旋转180°则转至第二角度。在本公开其他实施例中,第三角度还可以是其他角度,例如,由该第三角度开始沿顺时针方向旋转90°转至第一角度,沿逆时针方向旋转270°则转至第二角度。
第一插孔223和第二插孔2113中插入销轴214后,可以对电机进行机械零点的设定,该机械零点可作为转动方向的分界,由该机械零点开始向第一方向转动或者向第一方向的反方向转动。伺服一体机内置绝对值编码器记录位置,该位置与转盘回转的机械零点对应,记录零点位置后销轴214即可撤掉。在出厂前进行一次机械零点的设定即可。
图9示意性示出了根据本公开另一实施例的旋转装置的结构示意图。
如图9所示,根据本公开的实施例,旋转装置还可以包括底板271、处理器(图中未示出)、供电部件272和驱动轮系273。
供电部件272例如可以是电池,供电部件272可以固定于底板271上且可以固定于底板271的尾部区域,尾部区域还可以设置充电刷。处理器可以固定于供电部件272的上方。驱动轮系273可以连接于底板271的两侧。
支撑部件可以固定于底板271的中部区域,例如可以是支撑部件中的多个侧板与底板271固定连接。
根据本公开的实施例,旋转装置还可以包括防撞传感器274,防撞传感器可以通过安装支架装于底板271上。
根据本公开的实施例,装置还可以包括扫描部件。
图10a、图10b和图10c示意性示出了根据本公开实施例的扫描部件的示意图。
如图10a、图10b和图10c所示,扫描部件280可以设置于支撑部件的容置空间中并与支撑部件的侧板212连接,扫描部件280的扫描端部281朝向支撑部件的底部。
底板271的中部可以开设通孔2711,以使扫描部件280的扫描端部可以通过通孔2711扫描地面上的条码图案,以进行导航。
图11示意性示出了根据本公开实施例的底板的底面的结构示意图。
如图11所示,底板271的下方还可以设置多个万向轮290,多个万向轮分别装于底板的四个万向轮安装孔内,由此底盘具备了行走和转向能力。
本公开实施例的另一方面提供了一种分拣设备。
图12a示意性示出了根据本公开实施例的分拣设备300的结构示意图。
图12b示意性示出了根据本公开实施例的分拣设备300的部分结构示意图。
如图12a和图12b所示,分拣设备300包括分拣部件310和旋转装置320。分拣部件310可以包括皮带滚筒组件和用于检测皮带上有无货物的传感器。
具体地,旋转装置320可以参见图2至图11,以及上述关于相应附图的描述,在此不再赘述。基于旋转装置320,分拣部件310可以朝向前后左右各个方向出货。
根据本公开的实施例,分拣设备300还可以包括支撑筒330,支撑筒330的第一端与旋转装置的托盘固定连接,支撑筒的中空通道与托盘的第二通孔对齐,分拣部件310与支撑筒330的第二端固定连接。例如,支撑筒330上下各有一圆法兰331,下端法兰与托盘固定连接,上端法兰与分拣部件310同定连接。
底盘可以设置外壳340,以将旋转装置遮盖于外壳340内部。外壳上设置开关机键341和急停按钮342。
本领域技术人员可以理解,本公开的各个实施例和/或权利要求中记载的特征可以进行多种组合和/或结合,即使这样的组合或结合没有明确记载于本公开中。特别地,在不脱离本公开精神和教导的情况下,本公开的各个实施例和/或权利要求中记载的特征可以进行多种组合和/或结合。所有这些组合和/或结合均落入本公开的范围。
以上对本公开的实施例进行了描述。但是,这些实施例仅仅是为了说明的目的,而并非为了限制本公开的范围。尽管在以上分别描述了各实施例,但是这并不意味着各个实施例中的措施不能有利地结合使用。本公开的范围由所附权利要求及其等同物限定。不脱离本公开的范围,本领域技术人员可以做出多种替代和修改,这些替代和修改都应落在本公开的范围之内。
- 还没有人留言评论。精彩留言会获得点赞!