一种装船机悬臂防撞装置及方法与流程
[0001]
本发明属于港口机械设备技术领域,特别是一种装船机悬臂。
背景技术:
[0002]
装船机在装船作业过程中,煤或其他散料(以下以煤为例)通过溜筒卸到船舱内,需要不时调整装船机大车位置、悬臂的俯仰角度、回转角度、伸缩长度、溜筒的伸缩长度等,悬臂在移动过程中较易碰撞到船舶的驾驶舱、船舱盖板等。
[0003]
目前防止悬臂碰撞的方法主要是拉绳、微波雷达等检测手段。拉绳主要是依靠拉绳的物理形变检测悬臂的碰撞状态,其碰撞检测可靠性较低,误判率较高。微波雷达具有较高的测量精度,但其体积和质量较大,安装不方便,维护工作量较大。
技术实现要素:
[0004]
本发明的目的是针对现有技术存在的上述问题,提出了一种装船机悬臂防撞装置及方法,本装船机悬臂防撞装置及方法能全方位的防止装船机悬臂的防撞。
[0005]
本发明的目的可通过下列技术方案来实现:一种装船机悬臂防撞装置及方法,包括悬臂,所述悬臂上设置有悬臂前端防撞检测装置、悬臂平台左侧防撞检测装置、悬臂平台右侧防撞检测装置、悬臂左前侧防撞检测装置、悬臂左后侧防撞检测装置、悬臂右前侧防撞检测装置、悬臂右后侧防撞检测装置。
[0006]
在某些实施方式中,所述悬臂前端防撞检测装置、悬臂平台左侧防撞检测装置、悬臂平台右侧防撞检测装置为第一激光测距传感器,所述第一激光测距传感器通过角度调节器连接在悬臂平台上。
[0007]
在某些实施方式中,悬臂左前侧防撞检测装置、悬臂左后侧防撞检测装置、悬臂右前侧防撞检测装置、悬臂右后侧防撞检测装置为第二激光测距传感器,所述第二激光测距传感器通过角度调节器连接在悬臂平台上。
[0008]
在某些实施方式中,所述角度调节器包括第一连接体与第二连接体,所述第一连接体与所述激光测距传感器连接,所述第二连接体具有与支架连接的第二端面弧形通槽,螺栓穿过第二端面弧形通槽与所述支架连接,第一连接体上设置有与第一端面弧形通槽垂直的第一侧面弧形通槽,所述第一连接体与第二连接体通过穿过第一侧面弧形通槽的螺栓连接,所述支架与悬臂平台连接。
[0009]
在某些实施方式中,悬臂平台上设置有悬臂检修平台,所述第二激光测距传感器设置在所述悬臂检修平台上。
[0010]
在某些实施方式中,还包括悬臂上的溜筒及溜筒防撞装置,所述溜筒防撞装置包括设置在所述溜筒上的弧形变形架, 所述弧形变形架由剪叉单元端部通过端部铰链依次连接,所述剪叉单元包括两个架杆,两个架杆长度相同,两个架杆通过中部铰链连接,中部铰链的一侧的杆体大于另一侧的杆体,所述弧形变形架的为于中部铰链径向内侧的端部铰链为内端部铰链,位于所述弧形变形架的为于中部铰链径向外侧的端部铰链为外端部铰
链,所述内端部铰链滑动的设置在圆形导轨上,所述圆形导轨与所述溜筒同轴设置,所述外端部铰链上设置激光测距传感器,同一径向上的内端部铰链与外端部铰链之间通过伸缩装置控制距离;所述弧形变形架由转动装置控制相对于圆形导轨转动。
[0011]
在某些实施方式中,所述中部铰链下方连接有所述溜筒轴向平行的防撞杆。
[0012]
在某些实施方式中,所述防撞杆具有一段弹性段。
[0013]
在某些实施方式中,所述防撞杆上设置有应力传感器。
[0014]
一种装船机悬臂防撞方法,根据装船机操作安全要求设置安全区、预警区、停止区,当检测物体在安全区内时,向装船机控制系统发送安全检测信号,装船机正常运行;当检测物体在预警区内时,向装船机控制系统发送预警检测信号,装船机正常运行但有安全提醒;当检测物体在停止区内时,向装船机控制系统发送停止检测信号,装船机立即停止运行;悬臂伸缩检测装置的检测数据发送至装船机控制系统,装船机控制系统计算悬臂左右侧前端安全距离l1、l2;当悬臂左前侧防撞检测装置、悬臂右前侧防撞检测装置检测物体检测距离小于安全距离l1、l2时,装船机控制系统自动停止作业,装船机控制系统设置悬臂左右侧后端安全距离l3、l4;当悬臂左后侧防撞检测装置、悬臂右后侧防撞检测装置检测物体检测距离小于安全距离l3、l4时,装船机控制系统自动停止作业与现有技术相比,本装船机悬臂防撞装置及方法具有以下优点:本发明利用激光测距技术,具有更高的精度和可靠性;悬臂防撞检测装置具有较大的探测角,增加防撞检测的空间范围;激光检测设备小巧轻便,便于安装和维护。
附图说明
[0015]
在附图(其不一定是按比例绘制的)中,相似的附图标记可在不同的视图中描述相似的部件。具有不同字母后缀的相似附图标记可表示相似部件的不同示例。附图以示例而非限制的方式大体示出了本文中所讨论的各个实施例。
[0016]
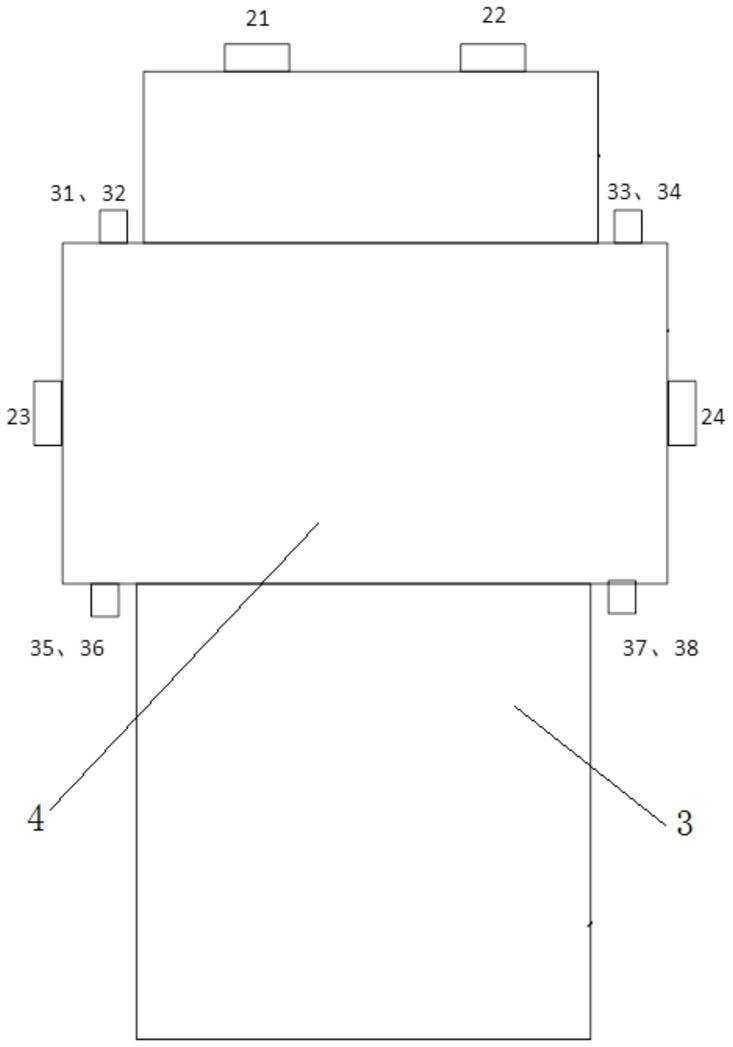
图1是实施例一的示意图;图2是图1的左视图;图3是图1的右视图;图4是第一激光测距传感器的示意图;图5是第二激光测距传感器的示意图;图6是实施例二的示意图;图7是图6的aa截面示意图;图8是图7的弧形变形架缩短的示意图;图9是实施例三的示意图。
[0017]
图中,溜筒1,第一激光测距传感器2,悬臂3,悬臂检修平台4,第一连接体5,第一侧面弧形通槽501,第二连接体6,第二端面弧形通槽601,支架7,侧面螺栓8,架杆9,中部铰链901,内端部铰链902,外端部铰链903,伸缩装置10,圆形导轨11,齿圈12,电机13,齿轮14,防撞杆15,弹性段16,应力传感器17,连杆18,第二激光测距传感器20,臂前端防撞检测装置21、22、悬臂平台左侧防撞检测装置23、悬臂平台右侧防撞检测装置24、悬臂左前侧防撞检测装置31、32、悬臂左后侧防撞检测装置35、36、悬臂右前侧防撞检测装置33、34、悬臂右后侧防撞检测装置37、38。
具体实施方式
[0018]
以下是本发明的具体实施例,并结合附图对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例,以下实施方式并不限制权利要求书所涉及的发明。此外,实施方式中说明的特征的所有组合未必是发明的解决方案所必须的。
[0019]
本领域的普通技术人员应理解,所有的定向参考(例如,上方、下方、向上、上、向下、下、顶部、底部、左、右、垂直、水平等)描述性地用于附图以有助于读者理解,且不表示 (例如,对位置、方位或用途等)对由所附权利要求书限定的本发明的范围的限制。另外,术语“基本上”可以是指条件、量、值或尺寸等的轻微不精确或轻微偏差,其中的一些在制造偏差或容限范围内。
[0020]
实施例一如图1、2、3、4、5所示,一种装船机悬臂防撞装置及方法,包括悬臂3,所述悬臂上设置有悬臂前端防撞检测装置21、22、悬臂平台左侧防撞检测装置23、悬臂平台右侧防撞检测装置24、悬臂左前侧防撞检测装置31、32、悬臂左后侧防撞检测装置35、36、悬臂右前侧防撞检测装置33、34、悬臂右后侧防撞检测装置37、38。所述悬臂前端防撞检测装置、悬臂平台左侧防撞检测装置、悬臂平台右侧防撞检测装置为第一激光测距传感器,所述第一激光测距传感器通过角度调节器连接在悬臂平台上。悬臂左前侧防撞检测装置、悬臂左后侧防撞检测装置、悬臂右前侧防撞检测装置、悬臂右后侧防撞检测装置为第二激光测距传感器,所述第二激光测距传感器通过角度调节器连接在悬臂平台上。
[0021]
所述角度调节器包括第一连接体5与第二连接体6,所述第一连接体与激光测距传感器连接,所述第二连接体具有与支架连接的第二端面弧形通槽601,螺栓穿过第二端面弧形通槽与所述支架连接,第一连接体上设置有与第一端面弧形通槽垂直的第一侧面弧形通槽501,所述第一连接体与第二连接体通过穿过第一侧面弧形通槽的螺栓连接,所述支架与悬臂平台连接。通过略松动螺栓可以使得弧形通槽可相对螺栓转动,从而使得激光测距传感器可相对连接体转动,使得所述第一连接体与第二连接体也可相对转动,从而可调节激光测距传感器的朝向,即测量方向的调节。
[0022]
悬臂平台上设置有悬臂检修平台4,所述第二激光测距传感器设置在所述悬臂检修平台上。
[0023]
悬臂前端防撞检测装置布置于悬臂前端,用于检测悬臂前端的障碍物;悬臂平台左侧防撞检测装置布置于悬臂平台左侧,用于检测悬臂平台左侧的障碍物;悬臂平台右侧防撞检测装置布置于悬臂平台右侧,用于检测悬臂平台右侧的障碍物;悬臂左前侧防撞检测装置、悬臂左后侧防撞检测装置分别布置于悬臂平台左侧前端和后端,用于检测悬臂左侧前端和后端的障碍物;悬臂右前侧防撞检测装置、悬臂右后侧防撞检测装置分别布置于悬臂平台右侧前端和后端,用于检测悬臂右侧前端和后端的障碍物。
[0024]
悬臂平台左侧防撞检测装置与悬臂平台右侧防撞检测装置对悬臂前端形成交叉检测。
[0025]
悬臂前端防撞检测装置、悬臂平台左侧防撞检测装置、悬臂平台右侧防撞检测装置采用面阵固态激光雷达技术,在水平面和垂直面分别有探测角α和β。
[0026]
第一激光测距传感器为ce30-d固态面阵28米激光雷达,0.4~30m(反射率为90%),具有探测角水平面α=60
°
,垂直面β=4
°
。悬臂平台左侧防撞检测装置21与悬臂平台右侧防撞
检测装置22对悬臂前端形成交叉检测。设备在距离5m处,可探测水平面直径5.8m宽、垂直面0.35m宽的矩形截面;在距离10m处,可探测水平面直径11.5宽、垂直面0.70m宽的矩形截面;在距离15m处,可探测水平面直径17.3m宽、垂直面1.05m宽的矩形截面。
[0027]
第二激光测距传感器采用单点测距激光雷达,型号tf02,0.4
ꢀ–ꢀ
22m (反射率90%),探测角度3
°
。设备在距离5m处,可探测直径0.26m的圆形截面;在距离10m处,可探测直径0.52m的圆形截面;在距离15m处,可探测直径0.79m的圆形截面。
[0028]
根据装船机操作安全要求设置安全区、预警区、停止区。当检测物体在安全区内时,向装船机控制系统发送安全检测信号,装船机正常运行;当检测物体在预警区内时,向装船机控制系统发送预警检测信号,装船机正常运行但有安全提醒;当检测物体在停止区内时,向装船机控制系统发送停止检测信号,装船机立即停止运行。
[0029]
悬臂伸缩检测装置的检测数据发送至装船机控制系统,装船机控制系统计算悬臂左右侧前端安全距离l1、l2;当悬臂左前侧防撞检测装置、悬臂右前侧防撞检测装置检测物体检测距离小于安全距离l1、l2时,装船机控制系统自动停止作业。装船机控制系统设置悬臂左右侧后端安全距离l3、l4;当悬臂左后侧防撞检测装置、悬臂右后侧防撞检测装置检测物体检测距离小于安全距离l3、l4时,装船机控制系统自动停止作业。
[0030]
实施例二如图6、7、8所示,与上述实施例不同的是,还包括悬臂上的溜筒及溜筒防撞装置,所述溜筒防撞装置包括设置在所述溜筒上的弧形变形架;所述弧形变形架由剪叉单元端部通过端部铰链依次连接,所述剪叉单元包括两个架杆9,两个架杆长度相同,两个架杆通过中部铰链901连接,中部铰链的一侧的杆体大于另一侧的杆体,所述弧形变形架的为于中部铰链径向内侧的端部铰链为内端部铰链902,位于所述弧形变形架的为于中部铰链径向外侧的端部铰链为外端部铰链903,所述内端部铰链滑动的设置在圆形导轨11上,所述圆形导轨与所述溜筒同轴设置,所述外端部铰链上设置激光测距传感器,同一径向上的内端部铰链与外端部铰链之间通过伸缩装置10控制距离,伸缩装置例如气缸,位置可相对圆形导轨固定设置,内端部铰链与外端部铰链间距变小时所述弧形变形架周向伸长,从而控制相邻激光测距传感器的间距变化,也可控制激光测距传感器的检测部位,这样可在需要时实现对特定方向区域范围的高密度光束检测,例如可实现对特定方向有尖端物体的检测预警,而在通常情况下可使得所述弧形变形架首尾封闭为一个封闭的圆形,实现对溜筒周围的全方位检测。
[0031]
所述弧形变形架由转动装置控制相对于圆形导轨转动,所述转动装置包括转动的设置在溜筒上的齿圈12,所述齿圈由电机13通过齿轮14控制转的,伸缩装置10通过连杆18与齿圈连接,从而驱动所述弧形变形架相对圆形导轨转动,从而改变所述弧形变形架的位置。
[0032]
实施例三如图9所示,与上述实施例不同的是,所述弧形变形架的中部铰链下方连接有所述溜筒轴向平行的防撞杆15,所述防撞杆具有一段弹性段16,例如金属弹片或弹簧,所述防撞杆上设置有应力传感器17,例如膜片应力传感器,可贴在防撞杆上或弹性段上。弹性段使得防撞杆具有一定的弹性,从而对撞机起到缓冲的作用,应力传感器用检测防撞杆受到的变形,即检测撞击位置及撞击力,与上述的激光测距传感器的功能相同也可通过所述弧形变形架的
变形实现对特定区域范围的定向检测或防撞。
[0033]
尽管本文较多地使用了一些术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。说明书及附图中所示的装置及方法中的动作、步骤等执行顺序,只要没有特别明示顺序的限定,只要前面处理的输出并不用在后面的处理中,则可以任意顺序实现。为描述方便起见而使用“首先”、“接着”等的说明,并不意味着必须依照这样的顺序实施。
[0034]
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1