驮运货物AGV行驶在高脚货架下方的高吞吐量仓库
本发明涉及仓储物流与分拣配货等装备,尤其是一种驮运货物agv行驶在高脚货架下方的高吞吐量仓库,作为工具、外购件、自制件、装配成品的企业一体化仓库,还适合电商仓储与拣货流程的整合。
背景技术:
1、在企业应用场景中,绝大部分企业都是对生产的产品进行大批量仓储,部分企业还对生产原材料进行大批量仓储;实际应用中,也有很多企业对工具、外购件、自制件(半成品)、装配成品有一体化仓库需求;工况上,对工具、外购件、自制件(半成品)和存入装配成品频繁地存取,因此针对自动化立体仓库的整体架构进行改造,尤其需要克服巷道进出端口的瓶颈现象。
2、随着电子商务的发展,货品的高效配送也越来越重要,现在电商拣货流程包括:①非破坏性的打开物流箱,该物流箱为从供应商物流运输到电商处的纸箱,物流箱打开后对每件内包装货品读码、货品信息入数据库;②仓储:物流箱重新贴封条,进行备货仓储;③理货:再次拆封物流箱,将货品放入超市货架;④拣货(又称配货):在各超市货架处(人工拖行拣货车或智能小车自行)、人工按订单取下货品、读码、拣到内部使用的订单周转箱里;⑤包装:读码校验,将订单周转箱内的一个订单的所有拼货、发票装入小纸箱或塑料袋等外包装,贴上快递单;⑥分拣:按不同线路或各个快递公司装进塑料周转箱或编织袋;⑦配载:将塑料周转箱或编织袋按照线路配到运输车辆上。上述现有的拣货流程中,需要多次封箱、开箱的操作,操作流程繁琐,实施效率低;另一方面,拣货过程类似超市购物,需要人工拖行拣货车或智能小车自行、寻找到货品位置、人工从超市货架上拿取订单中的货品,拣货效率低。
3、为了解决纸箱多次封箱开箱操作、从超市货架上拣货等操作流程造成的拣货效率低、以及超市货架占用空间大的问题,业界提出消除超市货架为基础的新模式:采用瓦楞纸箱远程运输、入库开箱、倒入库内周转箱存放或瓦楞纸箱仓储、并直接输送到拣货工位的方式,但是分拣工位操作量大、占用平面面积大,这种新方式是仓储的后端拣货模式。
4、此外,还有一种前端拣货模式,包括如下操作步骤:步骤一:准备工作,在仓库中处理瓦楞纸箱的箱盖,暴露瓦楞纸箱内的货品;步骤二:分装操作,机器人抓取或吸取,或人工抓取,将常用数量货品都扫码后放进带rfid的抽屉中;步骤三:通过中层和下层的立体输送,抽屉防尘地存储到高吞吐量仓库中、或直接运到拣货位置;步骤四:将订单货品相应品种和数量的一个或多个抽屉,从高吞吐量仓库中调出;步骤五:通过中层和下层的立体输送,运至拣货位置,码垛机器人将一个或多个抽屉中相应品种和数量的订单货品,轻轻倾倒在输送带上相应标识段,标识段标识是rfid软标签或视觉识别码;或送至出货口,转送至装配工序;已经是空的抽屉通过上层和下层的立体输送运至分装操作工位;步骤六:通过输送带,送至包装工位进行运输包装和粘贴面单,或对具有运输包装箱的订单货品直接外贴面单。
5、电商的前端拣货模式、后端拣货模式,涉及的自动化立体仓库均带有仓储与拣货(配货)一体化功能,从而消除了瓦楞纸箱仓储后拆包、手工放置货品在超市货架上、以及agv将超市货架送至配货人员处等流程。
6、在前述企业一体化仓库、电商仓储与拣货综合仓库的应用场景,不同于一件瓦楞纸箱只存储一次的常规方式,是以每件瓦楞纸箱中货品数量为存储次数,存在频繁地存取的工况,也需要对自动化立体仓库的整体架构进行改造,尤其需要克服巷道进出端口的瓶颈现象,以提高吞吐效率。
技术实现思路
1、本技术人针对上述现有生产技术中的缺点,提供一种结构合理的驮运货物agv行驶在高脚货架下方的高吞吐量仓库,从而对自动化立体仓库的整体架构进行了改造,有效的克服了巷道进出端口的瓶颈的现象,大大提高了吞吐效率,减少了巷道的宽度,大大提高了空间利用率。
2、本发明所采用的技术方案如下:
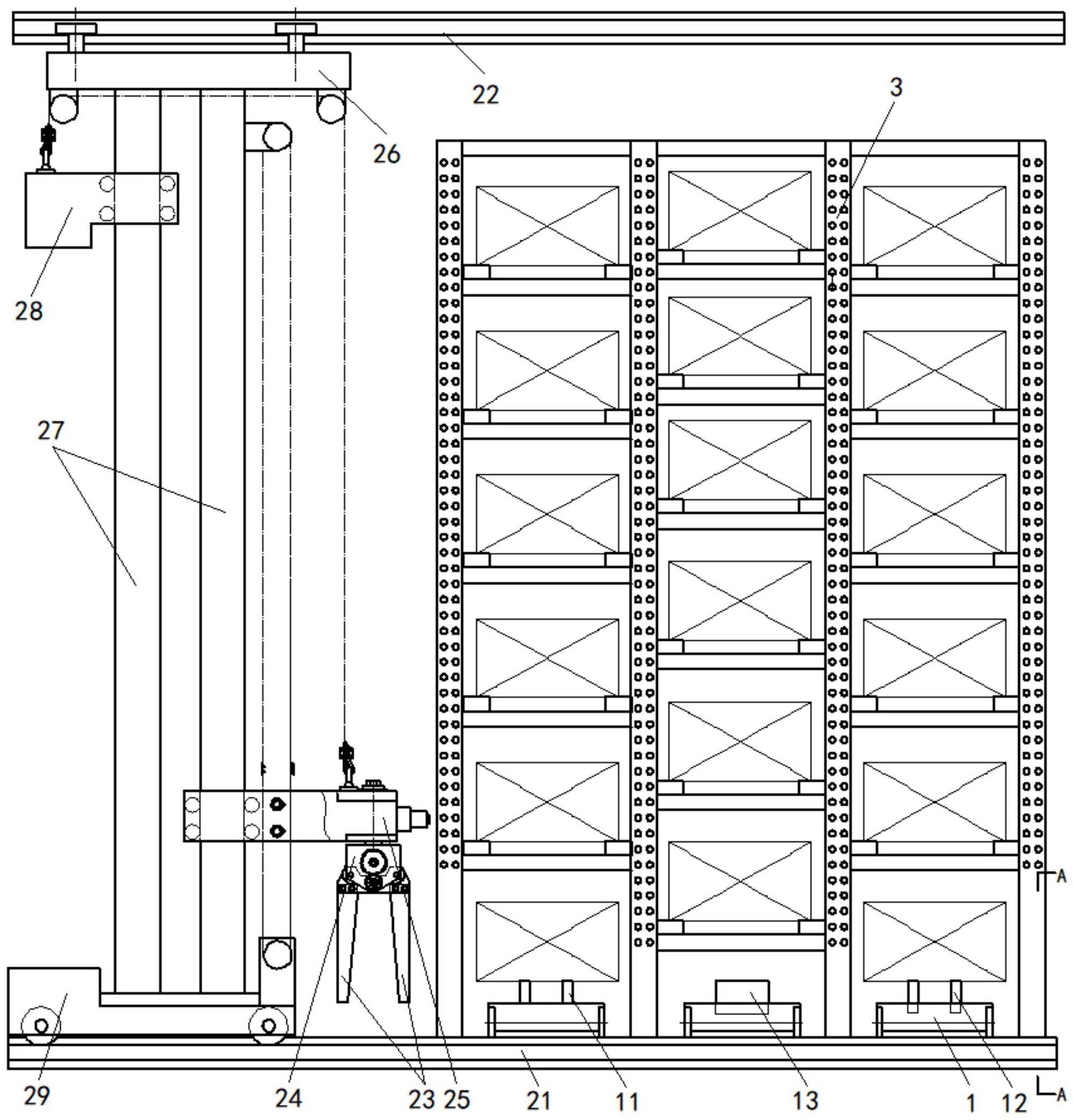
3、一种驮运货物agv行驶在高脚货架下方的高吞吐量仓库,包括agv车、堆垛机、高脚货架、以及无或有输送线;
4、相邻两个高脚货架之间设置巷道,每条巷道至少包含一个堆垛机,每个堆垛机配合有多台agv车,驮运货物的agv车或空载的agv车在出入仓库时,均在高脚货架下面高脚之间横向行驶和巷道里纵向行驶,或者在高脚之间横向、纵向行驶和巷道里纵向行驶;通过对堆垛机的操作位姿、agv车的行驶路径进行动态优化,确定在巷道内货物的最佳交付位置,堆垛机与agv车协同控制,在最佳交付位置交换货物;
5、单个agv车的顶面设置二条固定支撑条、或二条升降支撑条、或顶升平台,所述二条固定支撑条相对于车轮位置不变,所述二条升降支撑条相对于车轮同步升降,所述顶升平台相对于车轮升降;
6、堆垛机分别是:地轨嵌入地面的、带有或不带有天轨的堆垛机,无地轨的、带有或不带有天轨的堆垛机;
7、堆垛机在巷道里纵向行驶,立柱下端固定在配重行走装置上,配重行走装置一侧带有堆垛机整体的配重;l形货叉设在最下面,横移装置在l形货叉的上方,转位装置在横移装置的上方,升降装置驱动部在立柱的下方;横移装置、转位装置及升降装置设置在一根立柱的一侧,升降配重装置设置在另一根立柱的另一侧,升降装置与升降配重装置之间靠钢缆连接、其升降运动方向相反,从而减少升降装置驱动部的功率;在立柱的导向下,升降装置带动转位装置和横移装置同时升降运动,横移装置驱动l形货叉水平横向移动,对高脚货架进行存取操作,转位装置使二根l形货叉整体沿竖直轴向外转动180度,对另一侧的高脚货架进行存取操作;
8、当有输送线时,输送线设置在巷道的一端或二端;
9、货物包括托盘及其上物品、或者周转箱及其内物品、或者瓦楞纸箱、或者袋装物品。
10、作为上述技术方案的进一步改进:
11、所述高脚货架全部的下方高度均高于agv车与所驮运货物的总高度;或者根据吞吐量与空间利用率进行多目标综合优化,除了高脚货架部分的下方高度高于agv车与所驮运货物的总高度之外,高脚货架其余部分的下方高度高于agv车的高度,仅限于空载的agv车通过;
12、其中,高脚货架的每根支撑脚部分焊接直立角铁或螺栓联结一个矩形管。
13、所述地轨嵌入地面的、带有或不带有天轨的堆垛机状况下,在巷道里移动的堆垛机下面,有嵌入地面的、支撑导向的地轨,地轨上表面与地面齐平、且地轨侧面与地面之间留有窄槽,agv车顺利穿行在窄槽上面;地轨靠膨胀螺栓、垫块和压板固定在地面的凹槽中;地轨侧面窄槽相邻的地面,选用直角钢板镶嵌,防止地面边角处的水泥崩坏;
14、地轨侧面与地面之间窄槽宽度越大,agv车的车轮直径越大、宽度越宽,抗冲击的效果越好、防卡防滑的效果越好。
15、所述无地轨的、带有或不带有天轨的堆垛机状况下,二条下侧轨对称地设置在巷道两侧、高于agv车与所驮运货物的总高度的位置;为堆垛机在巷道中移动导向的二条下侧轨,被固定在高脚货架上、或多处支撑固定在地面上;
16、同时,堆垛机的二根立柱外侧安装有二块固定板,每块固定板上安装了二个侧导轮架,四个侧导轮架上的侧导轮始终与两侧的下侧轨接触而纵向导向。
17、agv车选用零转弯半径的、可前后左右四向移动的agv,所述agv是自动导航小车或自主移动机器人,可以在高脚货架下顺利行驶。
18、所述agv车中,固定支撑条的高度、升降支撑条和顶升平台的提升高度,均高于堆垛机上的l形货叉的厚度,水平叉部分的厚度;同时,二根固定支撑条或升降支撑条的外侧距离、顶升平台的宽度,均小于二个l形货叉之间在纵向的间隙;因此,在货物与agv车车体之间有l形货叉的操作空间,l形货叉下端的形状均为l形,便于进出在操作空间里。
19、堆垛机从高脚货架上存取货物时,l形货叉是水平横向运动,为了减少了巷道的宽度,l形货叉的运动与agv车之间的工作状况如下:
20、在最佳交付位置存入货物时,空载的l形货叉运动到位、停止不动,是载货的agv车车体移动到l形货叉下面,而不是l形货叉水平横向运动、主动插入操作空间里;然后带货的l形货叉向上竖直运动,从agv车上带离货物,再根据位姿规划,将货物存入高脚货架里;
21、在最佳交付位置取走货物时,带货的l形货叉先向下竖直运动到位、停止不动,agv车车体横向移动到带货的l形货叉下方,l形货叉稍稍下移,将货物放在固定支撑条上,或者升降支撑条、顶升平台上移,将货物从l形货叉上顶起;然后agv车车体再横向移动,直接带走货物,最后空的l形货叉根据位姿规划到达指定位置;
22、在优化设置的最佳交付位置处,agv车在l形货叉的正下方,货物只有升降运动以及随agv车移动的存货或取货运动。
23、在巷道的一端或二端有输送线的状况下,输送线、agv车共同负责货物的出、入库运输,堆垛机分别与agv车、输送线交换货物、并将货物在高脚货架里存取,堆垛机、agv车、输送线这三者进行调度优化从而确定货物存取方案。
24、输送线运送是单向的、或者是双向的;
25、输送线种类是皮带输送线、或滚筒输送线、或链板输送线、或网带输送线、或倍速链输送线。
26、在横移装置中,直角底板、直角支架最终装配成整体,二根l形货叉对称地靠两个螺钉固定在移动板上槽口中,移动板的对称面上固定了一个丝杠螺母,移动板的对称面两边各固定了一个长直线轴承,二个长直线轴承套在二根导杆,每根导杆的二端台阶段轴分别塞进直角底板、直角支架上对应的孔里;横移电机安装在直角底板侧部,大齿轮靠螺钉、垫片固定在横移电机轴上,大齿轮与小齿轮啮合,小齿轮靠螺钉、垫片固定在丝杠的一端,丝杠靠二个滚动球轴承分别支撑在直角底板、直角支架上;因此,横移电机驱动移动板,在长直线轴承、导杆导向下移动板带动二根l形货叉横向移动,在高脚货架里存取货物;
27、升降装置运动部与转位装置均在u形箱体内,在转位装置中,转位电机固定在u形箱体的右侧壁上,小锥齿轮靠螺钉、垫片固定在转位电机上,小锥齿轮与大锥齿轮啮合,大锥齿轮安装在竖直轴上、靠二根粗套筒轴向限位;竖直轴靠二个圆锥滚子轴承支撑,二个圆锥滚子轴承分别安装在矩形下盖板、矩形上盖板上的轴承孔里,矩形上盖板、矩形下盖板分别固定在u形箱体右侧的上下面处,竖直轴下端法兰与横移装置的直角底板紧固;因此,转位电机驱动横移装置沿竖直轴向外转动180度,对另一侧的高脚货架进行存取操作;
28、在升降装置中,在u形箱体的左侧开口处,上下相同地设置了四个导向滚轮,四个导向滚轮安装在导向转轴上,长套筒限制轴向位置,导向转轴靠二个带座轴承支撑,二个带座轴承分别安装在u形箱体的前后壁上;修形齿条块安装在调节隔板中间部位,调节隔板靠配合螺钉安装在u形箱体的前后壁上,配合螺钉中间的圆柱面直径与u形箱体上腰型槽宽度之间形成间隙配合关系;齿形带张紧装置设置在右侧立柱的上方,在立柱下方的升降装置的驱动部输出齿轮是齿形带的主动轮,齿形带与修形齿条块啮合,修形齿条块的齿顶平面与齿形平面之间大圆角过渡,升降装置驱动部带动齿形带移动,使得横移装置、转位装置在八个导向滚轮与立柱的导向下升降运动;
29、在升降配重装置中,在二块侧板右侧,上下相同地设置了四个导向滚轮,四个导向滚轮安装在导向转轴上,长套筒限制轴向位置,导向转轴靠二个带座轴承支撑,二个带座轴承分别安装在二块侧板上;配重块安装在二块侧板之间左侧位置,吊环固定在配重块上,钢缆一端固定在这个吊环,钢缆另一端经过二个钢缆导轮装置导向、并穿过二根立柱,固定在另一个吊环上,吊环固定在u形箱体的矩形上盖板上,二个导轮装置倒置固定在天轨处的升降装置下面。
30、本发明的有益效果如下:
31、本发明结构紧凑、合理,操作方便,通过设置agv、堆垛机、高脚货架、有或没有输送线,高脚货架之间的每个巷道至少一台堆垛机,巷道一端或二端的输送线与巷道平行,堆垛机分别是地轨嵌入地面的、或无地轨的,驮运货物或空载的agv,均在高脚货架下面无障碍行驶;三种agv分别是固定支撑条的、或升降支撑条的、或顶升平台的,以方便堆垛机的l形货叉操作;二根l形货叉沿竖直轴向外转动180度,对另一面高脚货架操作;靠堆垛机与agv、输送线协同,存取货物至高脚货架里;本发明有效的克服了巷道进出端口的瓶颈的现象,大大提高了吞吐效率,高效而柔性,减少了巷道的宽度,大大提高了空间利用率。
32、同时,本发明还具备如下优点:
33、(一)不仅是双向的输送线、而且是agv,参与货物的输入输出,再由一个及以上的堆垛机,存取于高脚货架,因此本发明克服了货物只能从巷道二端出入库的瓶颈,大大提高了仓库高吞吐量。
34、(二)一个及以上的堆垛机,与双向的输送线、agv协同操作,自动化仓库的柔性好、适应性强;对应企业用户,不仅作为装配成品的仓库,而且与工具库、原材料库、外购件库形成综合性仓库;对应电商用户,将货品的仓储与拣货的流程综合,消除了超市货架,减少存储面积、提高拣货效率。
35、(三)堆垛机与agv交换货物的地点可以是巷道中部的货架任一纵列货位的最下面,优化得出巷道内货物的最佳交付位置,因此堆垛机在巷道里纵向移动的距离大为缩短,存取高效率。
36、(四)堆垛机从高脚货架上存取货物时,l形货叉是水平横向运动;l形货叉运动与agv之间的工作状况如下:
37、在所述最佳交付位置存入货物时,空载的l形货叉运动到位、停止不动,是载货的agv车体移动到l形货叉下面,而不是l形货叉水平横向运动、主动插入所述操作空间里;然后带货的l形货叉向上竖直运动,从agv上带离货物,再根据位姿规划,将货物存入高脚货架里;
38、在所述最佳交付位置取走货物时,带货的l形货叉先向下竖直运动到位、停止不动,agv车体横向移动到带货的l形货叉下面,l形货叉稍稍下移,将货物放在固定支撑条上,或者升降支撑条、顶升平台上移,将货物从l形货叉上顶起;然后agv车体再横向移动,直接带走货物,最后空的l形货叉根据位姿规划到达指定位置;
39、从而减少了巷道的宽度,大大提高了空间利用率。
- 还没有人留言评论。精彩留言会获得点赞!