一种配合机械手作业的自动上料卸料接角模具的制作方法
1.本发明涉及汽车门窗密封件加工的技术领域,尤其涉及一种配合机械手作业的自动上料卸料接角模具。
背景技术:
2.接角模具是用来生产汽车门窗密封件的接角部分的设备,通常需要将若干根挤出条插入模具,随后通过注塑方式形成角部,并与挤出条粘接到一起,形成完整的接角产品。
3.现在普遍采用的是人工上料、卸料的方式,速度慢,一致性不稳定,影响生产节拍。针对上述问题,越来越多的上料、卸料作用通过机械手来完成,整个过程大大节省了人工,提高了生产效率。与之对应的,接角模具也必须适应机械手的直推上料、直拉卸料的过程,现在还没有这样的接角模具。
技术实现要素:
4.本发明旨在解决现有技术的不足,而提供一种配合机械手作业的自动上料卸料接角模具。
5.本发明为实现上述目的,采用以下技术方案:
6.一种配合机械手作业的自动上料卸料接角模具,包括模具底板、模具顶板、型芯组合体和上料导向控制组件;
7.模具顶板通过第一驱动组件可升降设置在模具底板上方;
8.型芯组合体由第一型芯、第二型芯、第三型芯、第四型芯、第五型芯依次围合组成,其中第一型芯固定在模具顶板上,第二型芯通过第二驱动组件滑动安装在模具顶板上,第三型芯、第四型芯固定在模具底板上,第五型芯通过第三驱动组件滑动安装在模具顶板上。
9.上料导向控制组件包括对应型芯组合体入口处且固定在模具顶板侧壁上的仿形块支撑架,仿形块支撑架上安装有挤出条仿形块。
10.上料导向控制组件还包括固定在模具顶板上表面的两个l形支架,两个l形支架分别位于型芯组合体入口处的左右两侧,l形支架的竖直板上安装有入料检测传感器。
11.仿形块支撑架为t形结构,仿形块支撑架的端板通过螺栓固定在模具顶板侧壁上。
12.挤出条仿形块底部设有n形凹槽并通过n形凹槽卡装在仿形块支撑架上。
13.第一驱动组件包括固定在模具底板侧面的第一油缸支架以及固定在模具顶板侧面的连接支架,第一油缸支架上固定有第一油缸,第一油缸顶部设有第一油缸连接头,第一油缸连接头与连接支架固定连接。
14.第二驱动组件包括固定在模具顶板后侧面的第二油缸支架,第二油缸支架上固定有第二油缸,第二油缸连有第二油缸连接头,第二油缸连接头连接有滑动连块,滑动连块面向模具顶板的一端连接有连杆,连杆滑动设置在模具顶板上,连杆另外一端设有梯形板,梯形板上开设有斜向条形孔,第二型芯底部固定有滑块,滑块底部设有滑柱且滑柱滑动安装在斜向条形孔内,模具顶板上固定有第一滑道板,第一滑道板位于第二型芯下方,第一滑道
板上设有滑块滑道,滑块滑动安装在滑块滑道内。
15.模具顶板上设有与连杆配合的凹槽且设有供梯形板移动的扩大凹槽。
16.第三驱动组件包括固定在模具顶板上的气缸支架,气缸支架上固定有气缸,气缸连有气缸连接头,气缸连接头连接有连接座,连接座固定在第五型芯上,模具顶板上固定有第二滑道板,第二滑道板位于第五型芯下方,第二滑道板上设有滑键滑道,第五型芯底部设有滑键,滑键滑动安装在滑键滑道内。
17.第一型芯、第二型芯、第三型芯、第四型芯、第五型芯组成的型芯组合体的入口成喇叭形开口结构。
18.本发明的有益效果是:本发明接角模具由人工上料卸料改为适应机械手自动上料卸料的机构,实现了全自动生产,大大节省了人力资源,提高了生产效率,同时全自动化生产大大提高了稳定性和精度要求。
附图说明
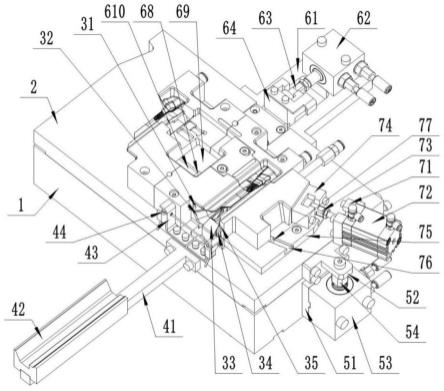
19.图1为本发明的结构示意图;
20.图2为本发明卸料时的示意图;
21.图3为本发明中模具顶板上梯形板、连杆及滑块的示意图;
22.图中:1-模具底板;2-模具顶板;3-型芯组合体;4-上料导向控制组件;5-第一驱动组件;6-第二驱动组件;7-第三驱动组件;8-挤出条;
23.31-第一型芯;32-第二型芯;33-第三型芯;34-第四型芯;35-第五型芯;
24.41-仿形块支撑架;42-挤出条仿形块;43-l形支架;44-入料检测传感器;
25.51-第一油缸支架;52-连接支架;53-第一油缸;54-第一油缸连接头;
26.61-第二油缸支架;62-第二油缸;63-第二油缸连接头;64-滑动连块;65-连杆;66-梯形板;67-斜向条形孔;68-滑块;69-第一滑道板;610-滑块滑道;611-扩大凹槽;
27.71-气缸支架;72-气缸;73-气缸连接头;74-连接座;75-第二滑道板;76-滑键滑道;77-滑键;
28.以下将结合本发明的实施例参照附图进行详细叙述。
具体实施方式
29.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。在下列段落中参照附图以举例方式更具体地描述本发明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
30.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
31.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具
体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
32.下面结合附图和实施例对本发明作进一步说明:
33.如图1至图3所示,一种配合机械手作业的自动上料卸料接角模具,包括模具底板1、模具顶板2、型芯组合体3和上料导向控制组件4。
34.上料导向控制组件4包括对应型芯组合体3入口处且固定在模具顶板2侧壁上的仿形块支撑架41,仿形块支撑架41上安装有挤出条仿形块42。仿形块支撑架41为t形结构,仿形块支撑架41的端板通过螺栓固定在模具顶板2侧壁上。挤出条仿形块42底部设有n形凹槽并通过n形凹槽卡装在仿形块支撑架41上。
35.上料导向控制组件4还包括固定在模具顶板2上表面的两个l形支架43,两个l形支架43分别位于型芯组合体3入口处的左右两侧,l形支架43的竖直板上安装有入料检测传感器44。入料检测传感器44的形式不固定,只要能够实现该检测功能即可,例如可以选用邦纳超声波测距传感器t30系列模拟量液位料位感应接近开关t30uuna。
36.模具顶板2通过第一驱动组件5可升降设置在模具底板1上方;第一驱动组件5包括固定在模具底板1侧面的第一油缸支架51以及固定在模具顶板2侧面的连接支架52,第一油缸支架51上固定有第一油缸53,第一油缸53顶部设有第一油缸连接头54,第一油缸连接头54与连接支架52固定连接。模具顶板1上设有插接在模具顶板2上的导向柱结构。导向柱的形状可以为圆柱形、长方体形。
37.型芯组合体3由第一型芯31、第二型芯32、第三型芯33、第四型芯34、第五型芯35依次围合组成,第一型芯31、第二型芯32、第三型芯33、第四型芯34、第五型芯35组成的型芯组合体3的入口成喇叭形开口结构。
38.其中第一型芯31固定在模具顶板2上,第二型芯32通过第二驱动组件6滑动安装在模具顶板2上;第二驱动组件6包括固定在模具顶板2后侧面的第二油缸支架61,第二油缸支架61上固定有第二油缸62,第二油缸62连有第二油缸连接头63,第二油缸连接头63连接有滑动连块64,滑动连块64面向模具顶板2的一端连接有连杆65,连杆65滑动设置在模具顶板2上,连杆65另外一端设有梯形板66,梯形板66上开设有斜向条形孔67,第二型芯32底部固定有滑块68,滑块68底部设有滑柱且滑柱滑动安装在斜向条形孔67内,模具顶板2上固定有第一滑道板69,第一滑道板69位于第二型芯32下方,第一滑道板69上设有滑块滑道610,滑块68滑动安装在滑块滑道610内,模具顶板2上设有与连杆65配合的凹槽且设有供梯形板66移动的扩大凹槽611。
39.第三型芯33、第四型芯34固定在模具底板1上。
40.第五型芯35通过第三驱动组件7滑动安装在模具顶板2上;第三驱动组件7包括固定在模具顶板2上的气缸支架71,气缸支架71上固定有气缸72,气缸72连有气缸连接头73,气缸连接头73连接有连接座74,连接座74固定在第五型芯35上,模具顶板2上固定有第二滑道板75,第二滑道板75位于第五型芯35下方,第二滑道板75上设有滑键滑道76,第五型芯35底部设有滑键77,滑键77滑动安装在滑键滑道76内。
41.本发明的上料过程如下:
42.机械手夹着挤出条8,移动到挤出条仿形块42上方,随后下移,使挤出条8从上到下放入,接触挤出条仿形块42;机械手夹着挤出条8,在挤出条仿形块42中向模具方向移动,至
入料检测传感器44处;入料检测传感器44检测到挤出条8到位后,机械手继续夹着挤出条8入料一定距离,该距离根据产品尺寸设定;随即机械手入料判定到位,机械手松开挤出条8,并移出模具范围,模具后续将进行合模、注塑。
43.第一型芯31、第二型芯32、第三型芯33、第四型芯34、第五型芯35组成的型芯组合体3的入口成喇叭形开口结构,以便机械手入料导入正确位置。
44.挤出条仿形块42严格按挤出条8外形尺寸设计,保证挤出条8在挤出条仿形块42中移动时有导向。
45.本发明的卸料过程如下:
46.压力机开模,第二油缸62从起始位置拉动,带动连杆65、梯形板66后退,此时滑块68通过滑柱在斜向条形孔67内滑动,从而带动第二型芯32水平向外侧移动,从水平方向避让产品;气缸72从起始位置拉动第五型芯35,使第五型芯35斜向后退,为产品提供水平避让空间。
47.同时为第一油缸53从初始位置推动,带动模具顶板2垂直向上运动,此时模具顶板2上第一型芯31、第二型芯32、第五型芯35均上升,而第三型芯33、第四型芯34由于固定在模具底板1上,第三型芯33、第四型芯34与第一型芯31、第二型芯32、第五型芯35分开,从而为产品提供了垂直避让空间。
48.所有运动为接角产品直拉卸料提供避让空间,消除了接角产品损伤的风险,同时大大减小了卸料阻力。
49.卸料时,机械手移动至挤出条仿型块42上方,抓取接角完成的产品,由于挤出条仿形块42能精确控制挤出条8的位置,使机械手能精准的抓到产品。
50.本发明接角模具由人工上料卸料改为适应机械手自动上料卸料的机构,实现了全自动生产,大大节省了人力资源,提高了生产效率,同时全自动化生产大大提高了稳定性和精度要求。
51.上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种改进,或未经改进直接应用于其它场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1