一种高炉喷涂全自动机械手以及高炉内衬喷涂方法与流程
本发明涉及高炉喷涂,尤其是涉及一种高炉喷涂全自动机械手以及高炉内衬喷涂方法。
背景技术:
1、高炉是长期处于连续高温生产的冶炼设备。内衬要承受高温煤气流的冲刷和化学侵蚀,所以在高炉内壁一般喷涂有防护涂层进行防护,在长期运行中,高炉内衬受到浸蚀、剥落出现局部或大面积损坏,影响高炉正常运行。现有喷涂技术采用吊装伸缩喷涂装置进行对高炉内壁的喷涂,例如专利号为202021423540.8的专利公开了一种可调距的高炉内衬防火层喷涂装置,通过水平移动喷枪实现,采用边升降边旋转喷涂的工艺喷涂,同时现有技术中还有采用伸缩杆的形式移动喷枪实现不同直径高炉内壁的喷涂。但是这种喷涂装置和工艺还存在如下技术问题:
2、(1)由于喷涂面积小使得喷涂效率低,且整体为螺旋上升轨迹,容易发生漏涂现象,对湿法或半干法喷涂,凝固需要一定的时间,一次性喷涂过厚,涂料容易流动,影响喷涂质量。
3、(2)喷涂前需要采用高压水清理,需要单独吊装清理设备,且采用水进行清理时水无法回收。
4、(3)在喷涂过程中虽然设置摄像头用于采集喷涂前、喷涂过程中以及喷涂后的图像,但是喷涂过程中会产生喷雾影响图像的采集。
技术实现思路
1、本发明的目的是提供一种高炉喷涂全自动机械手以及高炉内衬喷涂方法,解决上述技术问题。
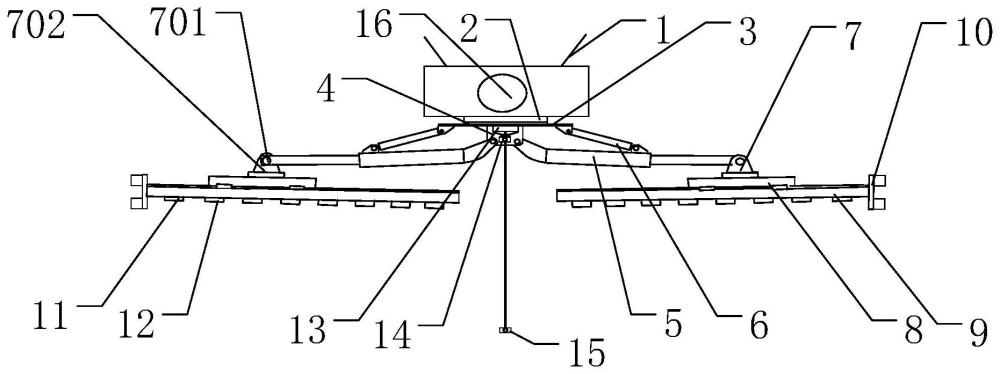
2、为实现上述目的,本发明提供了一种高炉喷涂全自动机械手,包括吊装机和喷涂单元,喷涂单元包括固定在吊装机上的第一转盘,第一转盘的中轴线与高炉中轴线重合,第一转盘上设置有折叠调节架,折叠调节架上对称设置有两个旋转喷涂机构,旋转喷涂机构包括旋转板和安装在旋转板上的喷头,喷头与旋转板内部的连通通道相连通,连通通道通过旋转接头与供料机构的供料管相连接。
3、优选的,折叠调节架包括固定在第一转盘的固定板,固定板中部设置有铰接板,铰接板对称铰接有支撑臂,支撑臂为伸缩缸,支撑臂与固定板通过开展伸缩缸相连接,支撑臂顶部通过摆动组件连接有固定轨道,固定轨道上设置有伸缩组件,伸缩组件与旋转板的旋转驱动电机固定连接。
4、优选的,摆动组件包括固定在支撑臂顶部的摆动驱动电机,摆动驱动电机的输出轴通过连接件与固定轨道相连接;
5、伸缩组件包括滑动设置在固定轨道上的伸缩臂,伸缩臂的一侧固定有齿条,固定轨道中部开设有固定槽,固定槽内设置有伸缩驱动电机,伸缩驱动电机的输出轴固定有驱动齿轮,驱动齿轮与齿条相啮合。
6、优选的,喷头设置有两个,两个喷头通过间距调节组件安装在旋转板上,间距调节组件包括调节驱动电机,调节驱动电机的输出轴上安装有驱动板,驱动板的两端均连接有连动板,两个连动板分别与两个喷头相连接,喷头滑动设置在旋转板上,喷头通过软管与连通通道相连通。
7、优选的,固定板上通过高度调节组件设置有第一摄像头和第二摄像头,高度调节组件包括固定在固定板上的卷扬机,卷扬机的钢带顶端固定有第一摄像头,钢带的截面为弧形,钢带上通过固定环设置有第二摄像头,固定环上设置有至少两个球头柱塞,卷扬机上设置有导向环,导线环上设置有释放电磁铁,释放电磁铁与固定环相对设置,第一摄像头和第二摄像头上分别设置有第一测距传感器和第二测距传感器。
8、优选的,伸缩臂另一侧设置有若干吸尘嘴和若干吹气嘴,吸尘嘴和吹气嘴交错设置,若干吸尘嘴通过伸缩臂内其中一个通气通道与吸尘管相连接,若干吹气嘴通过伸缩臂内另一通气通道与吹气管相连接,吸尘管和吹气管通过旋转接头分别与真空泵的进气管和出气管相连接,进气管上设置有过滤装置,过滤装置与出气管之间设置有切换管,切换管与出气管通过三通阀相连接,出气管连接有排气管,排气管上设置有排气阀。
9、一种基于上述一种高炉喷涂全自动机械手的高炉内衬喷涂方法,具体步骤如下:
10、步骤s1:吊装设备;通过吊装机将折叠状态下的高炉喷涂全自动机械手设置在高炉内,且第一转盘的中轴线与高炉中轴线重合;
11、步骤s2:开展设备并调整部件位置;通过开展伸缩缸将折叠调节架展开,通过摆动组件和伸缩组件初始调整伸缩臂的位置,使得吸尘嘴和吹气嘴与高炉内壁相对设置;同时通过高度调节组件调节第一摄像头和第二摄像头的高度;
12、步骤s3:下降高压气体清理高炉内壁;吊装机带动高炉喷涂全自动机械手不断下降的同时启动真空泵和第一转盘,并根据第一摄像头和第二摄像头的采集的图像和高炉内径数据实时调整伸缩臂的倾斜角度,对高炉内壁进行高压吹气清理,同时通过吸尘嘴进行吸尘;
13、步骤s4:上升喷涂;调整通过摆动组件和伸缩组件初始调整伸缩臂的位置,使得喷涂机构与高炉内壁相对设置,吊装机带动高炉喷涂全自动机械手不断上升的过程中,根据内径数据实时调整伸缩臂的倾斜角度和伸出长度,使得旋转板与高炉内壁切线平行,在第一转盘和旋转板同时转动下喷头进行喷涂。
14、优选的,在步骤s3中,第一摄像头和第二摄像头分别采集清理前后的高炉内壁图像,并通过第一测距传感器和第二测距传感器分别采集清理前后的高炉内径,根据清理前的高炉内径实时调整伸缩臂的倾斜角度,使得伸缩臂与高炉内壁平行,伸缩臂的倾斜角度公式如下:
15、
16、其中,θ为伸缩臂的倾斜角度,l为第一摄像头与第二摄像头竖直方向的间距,d1为第一摄像头位置的高炉内径,d2为第二摄像头位置的高炉内径。
17、优选的,在步骤s4中,通过清理后的高炉内径数据调整实时调整伸缩臂的倾斜角度和伸出长度,使得旋转板与高炉内壁切线平行,根据清理后的高炉内径数据与设定数据的差值调整第一转盘转的速度、旋转板的转速以及吊装机的上升速度。
18、在喷涂过程中,导通切换管同时打开排气阀排气,使得吹气管与进气管相连通,对空气中的雾状涂料进行吸出。
19、优选的,在喷涂过程中第一转盘采用正反转的工作模式,旋转角度为180°,第二转盘采用同一方向持续旋转的工作模式。
20、因此,本发明采用上述一种高炉喷涂全自动机械手以及高炉内衬喷涂方法,具有以下有益效果:
21、(1)采用在升降与水平旋转过程中,通过旋转喷涂机构沿高炉内壁方向旋转喷涂,喷涂更加均匀,且喷涂轨迹实现重叠,实现少量多次喷涂,喷涂效果更佳。
22、(2)喷涂装置不仅仅具有喷涂功能,还具有清理高炉内壁的功能,实现一次吊装进行清理、喷涂和检测。
23、(3)采用高压气体进行清理高炉内壁的同时,对飞尘进行吸除,通过排气阀和三通阀的切换,在喷涂时进行雾状物料的吸除,使得清理和喷涂过程中图像采集更加清楚。
24、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种高炉喷涂全自动机械手,包括吊装机,其特征在于:还包括喷涂单元,喷涂单元包括固定在吊装机上的第一转盘,第一转盘的中轴线与高炉中轴线重合,第一转盘上设置有折叠调节架,折叠调节架上对称设置有两个旋转喷涂机构,旋转喷涂机构包括旋转板和安装在旋转板上的喷头,喷头与旋转板内部的连通通道相连通,连通通道通过旋转接头与供料机构的供料管相连接。
2.根据权利要求1所述的一种高炉喷涂全自动机械手,其特征在于:折叠调节架包括固定在第一转盘的固定板,固定板中部设置有铰接板,铰接板对称铰接有支撑臂,支撑臂为伸缩缸,支撑臂与固定板通过开展伸缩缸相连接,支撑臂顶部通过摆动组件连接有固定轨道,固定轨道上设置有伸缩组件,伸缩组件与旋转板的旋转驱动电机固定连接。
3.根据权利要求2所述的一种高炉喷涂全自动机械手,其特征在于:摆动组件包括固定在支撑臂顶部的摆动驱动电机,摆动驱动电机的输出轴通过连接件与固定轨道相连接;
4.根据权利要求3所述的一种高炉喷涂全自动机械手,其特征在于:喷头设置有两个,两个喷头通过间距调节组件安装在旋转板上,间距调节组件包括调节驱动电机,调节驱动电机的输出轴上安装有驱动板,驱动板的两端均连接有连动板,两个连动板分别与两个喷头相连接,喷头滑动设置在旋转板上,喷头通过软管与连通通道相连通。
5.根据权利要求4所述的一种高炉喷涂全自动机械手,其特征在于:固定板上通过高度调节组件设置有第一摄像头和第二摄像头,高度调节组件包括固定在固定板上的卷扬机,钢带的截面为弧形,卷扬机的钢带顶端固定有第一摄像头,钢带上通过固定环设置有第二摄像头,固定环上设置有至少两个球头柱塞,卷扬机上设置有导向环,导线环上设置有释放电磁铁,释放电磁铁与固定环相对设置,第一摄像头和第二摄像头上分别设置有第一测距传感器和第二测距传感器。
6.根据权利要求5所述的一种高炉喷涂全自动机械手,其特征在于:伸缩臂另一侧设置有若干吸尘嘴和若干吹气嘴,吸尘嘴和吹气嘴交错设置,若干吸尘嘴通过伸缩臂内其中一个通气通道与吸尘管相连接,若干吹气嘴通过伸缩臂内另一通气通道与吹气管相连接,吸尘管和吹气管通过旋转接头分别与真空泵的进气管和出气管相连接,进气管上设置有过滤装置,过滤装置与出气管之间设置有切换管,切换管与出气管通过三通阀相连接,出气管连接有排气管,排气管上设置有排气阀。
7.一种基于权利要求6所述的一种高炉喷涂全自动机械手的高炉内衬喷涂方法,其特征在于,具体步骤如下:
8.根据权利要求7所述的一种高炉内衬喷涂方法,其特征在于:在步骤s3中,第一摄像头和第二摄像头分别采集清理前后的高炉内壁图像,并通过第一测距传感器和第二测距传感器分别采集清理前后的高炉内径,根据清理前的高炉内径实时调整伸缩臂的倾斜角度,使得伸缩臂与高炉内壁平行,伸缩臂的倾斜角度公式如下:
9.根据权利要求8所述的一种高炉内衬喷涂方法,其特征在于:在步骤s4中,通过清理后的高炉内径数据调整实时调整伸缩臂的倾斜角度和伸出长度,使得旋转板与高炉内壁切线平行,根据清理后的高炉内径数据与设定数据的差值调整第一转盘转的速度、旋转板的转速以及吊装机的上升速度。
10.根据权利要求9所述的一种高炉内衬喷涂方法,其特征在于:在喷涂过程中第一转盘采用正反转的工作模式,旋转角度为180°,第二转盘采用同一方向持续旋转的工作模式。
技术总结
本发明公开了一种高炉喷涂全自动机械手以及高炉内衬喷涂方法,属于高炉喷涂技术领域,装置包括吊装机和喷涂单元,喷涂单元包括固定在吊装机上的第一转盘,第一转盘的中轴线与高炉中轴线重合,第一转盘上设置有折叠调节架,折叠调节架上对称设置有两个旋转喷涂机构,旋转喷涂机构包括旋转板和安装在旋转板上的喷头,喷头与旋转板内部的连通通道相连通,连通通道通过旋转接头与供料机构的供料管相连接。在升降和水平旋转的同时旋转喷涂,采用上述一种高炉喷涂全自动机械手以及高炉内衬喷涂方法,喷涂更加均匀且带有清理功能,且通过折叠调节架设置旋转喷涂机构,旋转喷涂机构与高炉内壁间距可调,施工方便。
技术研发人员:解清磊
受保护的技术使用者:河北绿冶窑炉工程技术有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!