一种管道智能封堵机器人液动锚定封堵装置的制作方法
[0001]
本发明涉及油气管道抢修封堵技术领域,具体涉及一种管道智能封堵机器人液动锚定封堵装置。
背景技术:
[0002]
随着油气能源的需求不断增长,运输线路发展迅猛,管道依靠其运输量大、占地面积小、建设周期短、相对安全可靠、耗能少、成本低、效益好等一系列优点成为输送石油、天然气等流体介质的主要方式。目前,我国已形成多个油气区域管网,而且随着能源工业的快速发展,我国油气管道建设将继续得到长足的发展。当管道突发事故会导致油气泄漏,因此需要对管道进行维护和更换。在维护过程中,不可避免地会采用管道封堵技术来封隔管道内部的输送介质。目前最新的技术是采用管内高压智能封堵技术,这项技术是20世纪90年代发展起来的一项新型封堵技术,封堵器从清管器的发球端进入,在管道介质的推动下克服管道中的台阶和弯头向前运动,到达欲封堵管段时,在超低频电磁脉冲信号(elf)的控制下,启动微型液压系统实现刹车并封堵。作业完成后在elf信号的控制下自动解封,继续在管内介质推动下直至收球端取出。这样的管内高压智能封堵所需作业时间更短,作业完成后不会在管道上留下任何其他附加装置,减少了故障点,大大降低维修成本和减少维修时间。
[0003]
但是,目前现有的管道智能封堵机器人锚定封堵装置在运用中还存在诸多不足:
[0004]
(1)现有的封堵装置中卡瓦的锚定过程与封堵橡胶的封堵过程由同一个液压缸控制,在装置减速过程中卡瓦会划伤管道,同时被划伤的管道会将正在封堵的封堵橡胶划伤,这将极大的影响装置的封堵性能。
[0005]
(2)现有的封堵装置中卡瓦有两种安装方式:一是采用连杆与封堵装置主体连接,其不能防止处于下方的卡瓦自然下垂,可能阻碍封堵机器人前进;二是通过螺钉连接,通过挤压碗挤压将卡瓦顶出,但是这种方式可能使得螺钉产生塑性变形,导致卡瓦不能顺利回弹,导致卡瓦影响封堵机器人后续运动。
[0006]
(3)现有的封堵装置上的轮子太小或者可回弹程度太小,导致管道智能封堵机器人在管道中遇到较大的凸起台阶时不能顺利通过。
[0007]
(4)现有的封堵装置内部液压系统采用裸露的液压管线,这样会导致装置结构复杂,使得封堵装置内部密封性能不佳,并且复杂的液压管线浪费了过多的空间。
[0008]
因此,目前亟需发明一种新的封堵装置,能同时解决将卡瓦锚定过程与封堵橡胶封堵过程分别实现;解决卡瓦自然下垂或者螺钉产生塑性变形阻碍管道智能封堵机器人运动的问题;改进轮子使得封堵装置可通过管内大尺寸台阶;能解决封堵装置内部液压管线分布过于复杂的问题。
技术实现要素:
[0009]
本发明的目的在于针对现有管道封堵装置在使用中存在的问题,提供一种管道智
能封堵机器人液动锚定封堵装置,以解决现有封堵装置在运用中遇到的一些问题:现有封堵装置卡瓦的锚定过程与封堵橡胶的封堵过程由同一个液压缸控制,不利于在管道智能封堵机器人封堵过程中实现先锚定后封堵的,这样会导致在锚定过程中封堵橡胶会与管道内壁长距离摩擦,损伤封堵橡胶;现有卡瓦有两种安装方式:一是采用连杆与封堵装置主体连接,其不能防止处于下方的卡瓦自然下垂,可能阻碍封堵机器人前进,二是通过螺钉连接,通过挤压碗挤压将卡瓦顶出,但是这种方式可能使得螺钉产生塑性变形,导致卡瓦不能顺利回弹,导致卡瓦影响封堵机器人后续运动;现有封堵装置上的轮子太小或者可回弹程度太小,导致管道智能封堵机器人在管道中遇到较大台阶时不能顺利通过的问题;现有的封堵装置内部液压系统采用裸露的液压管线,液压管线分布复杂,使得封堵装置内部密封性能不佳,并且复杂的液压管线浪费了过多的空间。
[0010]
本发明专利解决其技术问题所采用以下技术方案是:一种管道智能封堵机器人液动锚定封堵装置,其由前轮、锚定机构、封堵机构、后轮、螺栓-、铰接球头-、活塞杆、铰接球头-、液压管接头、锁紧螺钉组成,其特征在于:所述的活塞杆安装在装置中心位置;铰接球头-通过螺纹连接安装在活塞杆右端外侧,用于与管道封堵机器人右边其他部分连接;铰接球头-通过螺纹连接安装在活塞杆左端外侧,用于与管道封堵机器人左边其他部分连接;锁紧螺钉通过螺纹连接安装在铰接球头-上,防止铰接球头-在机器人运动过程中旋转,导致铰接球头-脱落,液压管接头通过螺纹连接安装在活塞杆左端,用于与其他模块液压管线连接;所述的锚定机构由卡瓦支架、卡瓦、螺栓-、液压缸-、螺栓-、端盖、螺母、活塞、液压缸盖-、螺栓-、螺栓
ⅵ
组成:端盖安装在活塞杆左侧,通过螺栓-与铰接球头-连接,卡瓦支架安装在端盖左侧,并通过螺栓-与端盖连接,卡瓦支架可相对于端盖径向滑动,卡瓦安装在卡瓦支架外侧,并通过螺栓
ⅵ
与卡瓦支架连接,液压缸-安装在卡瓦支架内部,螺栓-通过螺纹连接安装在液压缸-上,活塞安装在活塞杆与液压缸-之间,螺母安装在活塞右侧,通过螺纹连接安装在活塞杆上,液压缸盖-安装在液压缸-左侧,并且液压缸盖-通过螺栓-安装在液压缸-上;所述的锚封堵机构由挤压碗、封堵橡胶、橡胶支架、液压缸-、液压缸盖-、螺栓
ⅴ
组成:液压缸-安装在活塞杆上,液压缸盖-安装在液压缸-左侧,并且液压缸盖-通过螺栓
ⅴ
安装在液压缸-上,挤压碗通过螺栓连接安装在液压缸盖-左侧,橡胶支架安装在液压缸-外,封堵橡胶安装在橡胶支架上;前轮安装在装置左端,通过螺栓连接安装在挤压碗上;后轮安装在装置右端,通过螺栓连接安装在端盖上。
[0011]
所述的活塞杆内部设置一处液压通道-,作为液压油进出液压缸-的通道,活塞杆内部设置一处液压通道-,作为液压油进出液压缸-的另一处通道,活塞杆中部设置一处活塞结构,活塞杆内部设置一处液压通道-,作为液压油进出液压缸-的通道,活塞杆内部设置一处液压通道-,作为液压油进出液压缸-的另一处通道。
[0012]
所述的卡瓦支架在外圆弧面上设置卡齿,用于限制卡瓦,卡瓦支架内部设置一处导向通孔-,使得螺栓-可沿着通孔-滑动。
[0013]
所述的端盖周向均匀设置8处导向通孔-,使得螺栓-和卡瓦支架可相对于端盖径向滑动。
[0014]
所述的前轮由轮架、拉杆、前叉、轮子、锁定螺母、垫环、弹簧组成:轮子安装在两个前叉之间,前叉通过螺栓安装在轮架上,拉杆安装在轮架内部,弹簧安装在轮架内部,垫环安装在弹簧右侧,锁定螺母安装在弹簧右侧,并通过螺纹连接安装在拉杆右端。
[0015]
本发明有益效果是:1)实行卡瓦锚定过程与封堵橡胶封堵过程分开工作,可以实现在运动过程中先锚定再封堵,封堵机器人停住后实行封堵,使得封堵过程更加可靠;2)为满足管道封堵机器人在输油管道中锚定封堵的作用,设计数个卡瓦周向分布在装置的外围,每个卡瓦通过两个螺钉限制卡瓦与挤压碗和顶端圆盘之间的相对运动,可使挤压碗挤压卡瓦使得卡瓦径向滑动撑开,解决了现有装置卡瓦自然下垂或者螺钉产生塑性变形阻碍封堵机器人运动的问题;3)本发明的轮子最大可以回弹至装置外轮廓位置,使得封堵装置可通过较大尺寸台阶;4)本发明提出一种新型液压控制结构,在活塞杆内部设置四处液压通道,能满足装置液压系统的需要,省去了裸露的复杂液压管线,使得装置结构更加简单。
附图说明
[0016]
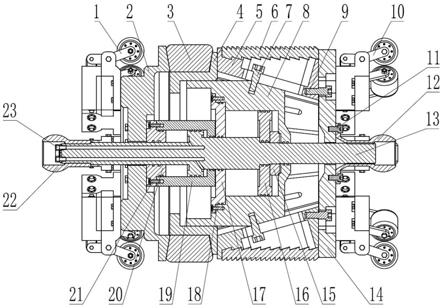
图1为本发明剖视图;
[0017]
图2为本发明外观图;
[0018]
图3为本发明前端视图;
[0019]
图4为本发明封堵前剖视图;
[0020]
图5为本发明封堵后剖视图;
[0021]
图6为本发明活塞杆a截面剖视图;
[0022]
图7为本发明活塞杆b截面剖视图;
[0023]
图8为卡瓦支架外观图;
[0024]
图9为端盖外观图;
[0025]
图10为本发明前轮外观图;
[0026]
图11为本发明前轮局部剖视图。
[0027]
图中,1-前轮,2-挤压碗,3-封堵橡胶,4-橡胶支架,5-卡瓦支架,6-卡瓦,7-螺栓-,8-液压缸-,9-螺栓-,10-后轮,11-螺栓-,12-铰接球头-,13-活塞杆,14-端盖,15-螺母,16-活塞,17-液压缸盖-,18-螺栓-,19-液压缸-,20-液压缸盖-,21-螺栓
ⅴ
,22-铰接球头-,23-液压管接头,24-螺栓
ⅵ
,25-锁紧螺钉,101-轮架,102-拉杆,103-前叉,104-轮子,105-锁定螺母,106-垫环,107-弹簧,501-卡齿,502-导向通孔-,1301-液压通道-,1302-液压通道-,1303-活塞结构,1304-液压通道-,1305-液压通道-,1401-导向通孔-。
具体实施方式
[0028]
下面结合附图对本发明做进一步的描述,本发明的保护范围不局限于以下描述:
[0029]
如图1-图11所示,一种管道智能封堵机器人液动锚定封堵装置,其由前轮1、锚定机构、封堵机构、后轮10、螺栓-11、铰接球头-12、活塞杆13、铰接球头-22、液压管接头23、锁紧螺钉25组成,其特征在于:所述的活塞杆13安装在装置中心位置;铰接球头-12通过螺纹连接安装在活塞杆13右端外侧;铰接球头-22通过螺纹连接安装在活塞杆13左端外侧;锁紧螺钉25通过螺纹连接安装在铰接球头-22上,液压管接头23通过螺纹连接安装在活塞杆13左端;所述的锚定机构由卡瓦支架5、卡瓦6、螺栓-7、液压缸-8、螺栓-9、端盖14、螺母15、活塞16、液压缸盖-17、螺栓-18、螺栓
ⅵ
24组成:端盖14安装在活塞杆13左侧,通过螺栓-11与铰接球头-12连接,卡瓦支架5安装在端盖14左侧,并通过螺栓-9与端盖14连接,卡瓦6安装在卡瓦支架5外侧,并通过螺栓
ⅵ
24与卡瓦支架5连接,液压缸-8安装在卡瓦支架5
内部,螺栓-7通过螺纹连接安装在液压缸-8上,活塞16安装在活塞杆13与液压缸-8之间,并且活塞16与液压缸-8采用间隙配合,活塞16与活塞杆13采用间隙配合,螺母15安装在活塞16右侧,通过螺纹连接安装在活塞杆13上,液压缸盖-17安装在液压缸-8左侧,并且液压缸盖-17通过螺栓-18安装在液压缸-8上;所述的锚封堵机构由挤压碗2、封堵橡胶3、橡胶支架4、液压缸-19、液压缸盖-20、螺栓
ⅴ
21组成:液压缸-19安装在活塞杆13上,液压缸盖-20安装在液压缸-19左侧,并且液压缸盖-17通过螺栓
ⅴ
21安装在液压缸-19上,挤压碗2通过螺栓连接安装在液压缸盖-20左侧,橡胶支架4安装在液压缸-8外,封堵橡胶3安装在橡胶支架4上;前轮(1)安装在装置左端,通过螺栓连接安装在挤压碗2上;后轮10安装在装置右端,通过螺栓连接安装在端盖14上。
[0030]
本发明中的活塞杆13内部设置一处液压通道-1301,活塞杆13内部设置一处液压通道-1302,活塞杆13中部设置一处活塞结构1303,活塞杆13内部设置一处液压通道-1304,活塞杆13内部设置一处液压通道-1305。
[0031]
本发明中的卡瓦支架5在外圆弧面上设置卡齿501,卡瓦支架5内部设置一处导向通孔-502。
[0032]
本发明中的端盖14周向均匀设置8处导向通孔-1401。
[0033]
本发明中的前轮1由轮架101、拉杆102、前叉103、轮子104、锁定螺母105、垫环106、弹簧107组成:轮子104安装在两个前叉103之间,前叉103通过螺栓安装在轮架101上,拉杆102安装在轮架101内部,弹簧107安装在轮架101内部,垫环106安装在弹簧107右侧,锁定螺母105安装在弹簧107右侧,并通过螺纹连接安装在拉杆102右端。
[0034]
本发明的工作过程如下:
[0035]
工作状态一:在管道机器人进行封堵的过程中,首先外部液压油通过液压管接头23向液压通道-1302打压,液压油通过液压通道-1302流进液压缸-8右腔室,液压缸-8在液压油的作用下向右运动,同时挤压卡瓦支架5向外侧做径向运动,直至安装在卡瓦支架外侧的卡瓦6挤压到管道26时,完成锚定过程;然后外部液压油通过液压管接头23向液压通道-1304打压,液压油通过液压通道-1304流进液压缸-19右腔室,液压缸-19在液压油的作用下向右运动,同时带动安装在液压缸盖-20上的挤压碗2向右运动,挤压碗2向右运动的过程中挤压封堵橡胶3,直至挤压封堵橡胶3完全封堵管道26,完成封堵过程。
[0036]
工作状态二:在管道机器人解除封堵的过程中,首先外部液压油通过液压管接头23向液压通道-1301打压,液压油通过液压通道-1301流进液压缸-8左腔室,液压缸-8在液压油的作用下向左运动,同时安装在液压缸-8上的螺栓-7带动卡瓦支架5向内侧做径向运动,直至恢复初始位置,完成解除锚定的过程;然后外部液压油通过液压管接头23向液压通道-1305打压,液压油通过液压通道-1305流进液压缸-19左腔室,液压缸-19在液压油的作用下向左运动,同时带动安装在液压缸盖-20上的挤压碗2向左运动,挤压碗2向左运动的过程中解除对封堵橡胶3的挤压,直至液压缸-19运动到封堵前的位置,完成解除封堵的过程。
[0037]
再次进行封堵时重复以上步骤即可。
[0038]
最后所应说明的是:以上实施例仅用以说明而非限制本发明的技术方案,尽管参照上述实施例对本发明进行了详细说明,本领域的普通技术人员应该理解:依然可以对本专利进行修改或者等同替换,而不脱离本发明的精神和范围的任何修改或局部替换,其均
应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1