一种适用于燃气管道泄漏的内封堵自适应型管道机器人
1.本实用新型涉及燃气管道维护,特别是涉及一种适用于燃气管道泄漏的内封堵自适应型管道机器人,属于机械传动技术领域。
背景技术:
2.城市燃气行业正处于发展阶段上的重要节点,城市燃气普及率超过97%,城市燃气管道总长度达到78.33万公里。但部分城市燃气管线进入“老龄化”,如何定期对管道进行有效地检测、清理和维护,需要思考,受管道所处环境所限,现有的管理清洗方式人工成本较高,为了满足上述要求,管道机器人应运而生,管道机器人是工作于管道内特定空间的智能装备。
3.目前常见的管道机器人多为轮式或履带式驱动,且功能过于单一,面对弯管、t型管等管道缺乏自适应能力;面对管壁复杂的管道,稳定性差;面对管道直径变化的管道无法正常作业。
技术实现要素:
4.本实用新型的主要目的是为了提供一种适用于燃气管道泄漏的内封堵自适应型管道机器人。
5.本实用新型的目的可以通过采用如下技术方案达到:
6.一种适用于燃气管道泄漏的内封堵自适应型管道机器人,包括驱动模块、封堵模块、支撑模块以及万向节,所述驱动模块与所述封堵模块通过所述万向节铰接,所述支撑模块焊接在所述封堵模块下端,所述驱动模块前端设置有驱动摄像头,所述封堵模块后端设置有封堵摄像头。
7.在进一步的技术方案中:所述驱动模块包括电动推杆、电磁离合器以及驱动电机,所述电动推杆安装在电动推杆座上,并由电动推杆外壳通过螺栓连接封装,所述驱动摄像头焊接在四个所述电动推杆座中心位置,所述电动推杆座外部一侧内部安装有锥齿轮,所述锥齿轮与所述电磁离合器连接,所述电磁离合器下方安装有驱动电机。
8.在工作时通过伸长电动推杆使得末端的橡胶轮挤压管道内壁,实现支撑机构的支撑作用,并且通过锥齿轮带动其旋转,实现支撑驱动与螺旋驱动两种运动形式。支撑驱动与螺旋驱动是驱动部分的两种基本运动形式,电磁离合器作为联接单元的螺旋角调节主要部件,通过控制电杆和减速电机来实现两种驱动方式的正常切换。
9.在进一步的技术方案中:所述封堵模块包括轴向电机、轴向步进电机、连杆和密封垫层,四个所述连杆外部一端螺栓连接有两个电机座,四个所述连杆与所述密封垫层通过螺栓连接,所述轴向电机和所述轴向步进电机均与两个所述电机座固定连接。
10.在进一步的技术方案中:所述轴向电机安装在靠近驱动模块一侧,两个所述电机座、所述轴向电机以及所述轴向步进电机均安装在导程杆上。
11.当封堵单元被驱动单元拖动至漏点时,前方周向步进电机启动使封堵执行机构连
杆绕主轴旋转,利用安装在四连杆上的摄像头进行周向扫描确定漏点位置;然后,在摄像的引导下启动驱动单元在管道轴线方向上进行轴向瞄准;最后,启动轴向电动机驱动封堵模块伸长或者缩短,迫使堵头将密封垫层压紧在漏点处实现封堵操作。
12.在进一步的技术方案中:所述支撑模块包括长连杆、中心骨架、短连杆以及支撑驱动电机,所述短连杆连接在安装座上,所述短连杆通过螺栓连接舵机安装座,所述舵机安装座上安装有舵机和支撑橡胶轮,所述短连杆连接所述长连杆,所述长连杆安装在所述中心骨架上,同时所述中心骨架下安装有所述支撑驱动电机。
13.在支撑部分驱动电机的推力下中心骨架带动长连杆上下运动,长连杆通过短连杆推动驱动部分橡胶轮压在管壁,使其具有逆时针旋转的趋势为机构提供预紧力,保证机器人在管道中的稳定性。
14.在进一步的技术方案中:所述万向节连接所述封堵模块与所述驱动模块。
15.在两单元之间形成柔性的连接,保证机器人在管道拐弯时的自适应性。
16.本实用新型的有益技术效果:
17.1、本实用新型可以通过在传统的燃气管道清洗机器人上设置由驱动模块与支撑模块组成的变径结构,可配合实现自主变径,以适应不同的管道直径,并且再管内稳定性强;
18.2、本实用新型可以通过在传统的燃气管道清洗机器人上设置电机带动封堵模块的轴向、轴向旋转,可以实现管内各个方位的封堵;
19.3、万向节的使用提高了管道机器人的过弯能力。本实用新型具有自适应性强、结构紧凑、运动连续平稳、可实现管道泄漏处封堵等优点。包括驱动模块、封堵模块、支撑模块、万向节。
附图说明
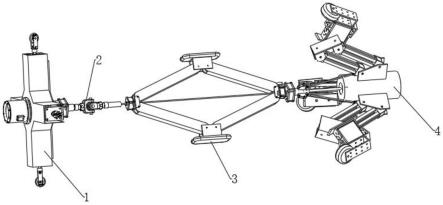
20.图1为按照本实用新型的一种适用于燃气管道泄漏的内封堵自适应型管道机器人的一优选实施例的结构示意图;
21.图2为按照本实用新型的一种适用于燃气管道泄漏的内封堵自适应型管道机器人的一优选实施例中驱动模块的结构示意图;
22.图3为按照本实用新型的一种适用于燃气管道泄漏的内封堵自适应型管道机器人的一优选实施例中驱动模块的右剖视图;
23.图4为按照本实用新型的一种适用于燃气管道泄漏的内封堵自适应型管道机器人的一优选实施例中封堵模块的结构示意图;
24.图5为按照本实用新型的一种适用于燃气管道泄漏的内封堵自适应型管道机器人的一优选实施例中支撑模块的结构示意图。
25.附图标记说明如下:
26.1-驱动模块;2-万向节;3-封堵模块;4-支撑模块;101-电动推杆外壳;102-电磁离合器;103-驱动摄像头;104-电动推杆座;105-驱动电机;106-锥齿轮;107-电动推杆;108-驱动橡胶轮;301-导程杆;302-轴向电机;303-电机座;304-连杆;305-密封垫层;306-封堵摄像头;307-轴向步进电机;401-安装座;402-舵机安装座;403-支撑橡胶轮;404-舵机;405-短连杆;406-长连杆;407-中心骨架;408-支撑驱动电机。
具体实施方式
27.为使本领域技术人员更加清楚和明确本实用新型的技术方案,下面结合实施例及附图对本实用新型作进一步详细的描述,但本实用新型的实施方式不限于此。
28.如图1-图5所示,本实施例提供的一种适用于燃气管道泄漏的内封堵自适应型管道机器人,包括驱动模块1、封堵模块3、支撑模块4以及万向节2,驱动模块1与封堵模块3通过万向节2铰接,支撑模块4焊接在封堵模块3下端,驱动模块1前端设置有驱动摄像头103,封堵模块3后端设置有封堵摄像头306。
29.实施例一:驱动模块1包括电动推杆107、电磁离合器102以及驱动电机105,电动推杆107安装在电动推杆座104上,并由电动推杆外壳101通过螺栓连接封装,驱动摄像头103焊接在四个电动推杆座104中心位置,电动推杆座104外部一侧内部安装有锥齿轮106,锥齿轮106与电磁离合器102连接,电磁离合器102下方安装有驱动电机105。在工作时通过伸长电动推杆107使得末端的橡胶轮挤压管道内壁,实现支撑机构的支撑作用,并且通过锥齿轮106带动其旋转,实现支撑驱动与螺旋驱动两种运动形式。支撑驱动与螺旋驱动是驱动部分的两种基本运动形式,电磁离合器102作为联接单元的螺旋角调节主要部件,通过控制电杆和减速电机来实现两种驱动方式的正常切换。
30.实施例二:封堵模块3包括轴向电机302、轴向步进电机307、连杆304和密封垫层305,四个连杆304外部一端螺栓连接有两个电机座303,四个连杆304与密封垫层305通过螺栓连接,轴向电机302和轴向步进电机307均与两个电机座303固定连接。轴向电机302安装在靠近驱动模块1一侧,两个电机座303、轴向电机302以及轴向步进电机307均安装在导程杆301上。当封堵单元被驱动单元拖动至漏点时,前方周向步进电机启动使封堵执行机构连杆304绕主轴旋转,利用安装在四连杆304上的摄像头进行周向扫描确定漏点位置;然后,在摄像的引导下启动驱动单元在管道轴线方向上进行轴向瞄准;最后,启动轴向电动机驱动封堵模块3伸长或者缩短,迫使堵头将密封垫层305压紧在漏点处实现封堵操作。
31.实施例三:支撑模块4包括长连杆406、中心骨架407、短连杆405以及支撑驱动电机408,短连杆405连接在安装座401上,短连杆405通过螺栓连接舵机安装座402,舵机安装座402上安装有舵机404和支撑橡胶轮403,短连杆405连接长连杆406,长连杆406安装在中心骨架407上,同时中心骨架407下安装有支撑驱动电机408。在支撑部分驱动电机105的推力下中心骨架407带动长连杆406上下运动,长连杆406通过短连杆405推动驱动部分橡胶轮压在管壁,使其具有逆时针旋转的趋势为机构提供预紧力,保证机器人在管道中的稳定性。
32.实施例四:万向节2连接封堵模块3与驱动模块1。在两单元之间形成柔性的连接,保证机器人在管道拐弯时的自适应性。
33.本装置的工作原理:本装置在具体使用的时候,先将管道机器人放入管径220mm-370mm的天然气管道,然后驱动模块1通过伸长电动推杆107使得末端的驱动橡胶轮108挤压管道内壁,实现支撑模块4的支撑作用,并且通过锥齿轮106带动其旋转,实现支撑驱动与螺旋驱动两种运动形式,在过弯道时,驱动模块1顺着管道过弯,并通过万向节2带动封堵模块3、支撑模块4过弯;在管道机器人行进时驱动摄像头103大致锁定漏点位置,当封堵模块3被驱动模块1拖动至漏点时,前方轴向步进电机307启动使封堵执行机构连杆304绕主轴旋转,利用安装在四组连杆304上的封堵摄像头306进行轴向扫描确定漏点位置;然后,在封堵摄像头306的引导下启动驱动模块1在管道轴线方向上进行轴向瞄准;最后,启动轴向电动机
驱动封堵模块3伸长或者缩短,迫使堵头将密封垫层305压紧在漏点处实现封堵操作。
34.以上,仅为本实用新型进一步的实施例,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型所公开的范围内,根据本实用新型的技术方案及其构思加以等同替换或改变,都属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1