一种用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置的制作方法
[0001]
本发明属于高超声速风洞模型自由飞试验技术领域,具体涉及一种用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置。
背景技术:
[0002]
随着现代战斗机和导弹飞行包线的扩展,在大攻角和带侧滑情况下的机动飞行,出现的非线性流动现象会对飞行器的动稳定性产生强烈的影响。要预测飞行器的动态特性,必须建立飞行器的动力学模型并获得动稳定导数,这是有效进行飞行器控制系统设计、飞行品质评价以及地面仿真的重要前提和基础。
[0003]
飞行器的动稳定性研究目前主要依靠飞行试验和风洞模拟试验。动稳定性的风洞试验方法又可分为两大类:一类模型有约束;另一类则是模型自由飞。在模型有约束的情况下,支撑系统产生的干扰比较明显且难以消除,对试验结果具有较大影响。与之相比,模型自由飞则具有试验中无支架干扰、无机械阻尼的优势,更能保证风洞试验与飞行状态的动力学相似,能较为真实地再现飞行器连续运动中的动态气动特性。
[0004]
风洞模型自由飞试验,是以某种方式把试验模型投放到风洞的均匀流场中,让其自由飞行,同时用高速摄像方法实时记录模型姿态随时间变化的图像序列,事后对图像进行判读,获得模型姿态随时间变化的数据,即运动轨迹,进而根据模型的质量特性参数和运动轨迹数据,反算出模型的气动力,从而定量或定性的分析其在流场中的气动特性参数。
[0005]
风洞模型自由飞试验的优势在于:与常规风洞测力、测压试验相比,无支架干扰;与风洞测量滚转(俯仰、偏航)阻尼和马格努斯力等动态特性试验相比,无支架干扰、无机械阻尼。而在高超声速试验中,支架干扰的影响不容忽视,而且对动态测量的影响较静态测量更为严重。
[0006]
风洞模型自由飞试验的结果可以为飞行器外场自由飞试验的设计提供参考依据,为制定总体方案,验证气动布局的合理性等方面工作提供重要的气动力参数,确保外场模型自由飞试验的安全可靠,为飞行器试飞奠定可靠的基础。
[0007]
当前,亟需发展一种用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置,实现在高超声速风洞试验环境下,模型可安全投放到风洞的均匀流场中进行自由飞行试验。
技术实现要素:
[0008]
本发明所要解决的技术问题是提供一种用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置。
[0009]
本发明的用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置,其特点是:所述的电磁铁悬挂投放装置包括从上至下顺序连接的安装支板、安装基座、吸附电磁铁,安装支板的上端固定在高超声速风洞试验段攻角机构的上迎角机构上,吸附电磁铁的下端吸
附模型;还包括固定在安装支板上的驱动器,固定在安装基座上的模型固定装置,驱动器控制模型固定装置夹紧或松开模型。
[0010]
进一步地,所述的安装支板的迎风面设置有尖劈。
[0011]
进一步地,所述的安装支板的背风面内侧开有容纳线缆的槽,槽口通过线缆封板封闭。
[0012]
进一步地,所述的安装基座为倒t形结构,竖直端插入安装支板,并通过螺钉连接、圆柱销定位与安装支板固定连接;水平端通过螺钉固定连接吸附电磁铁。
[0013]
进一步地,所述的吸附电磁铁包括从上至下顺序连接的电磁铁和模型适应接口,电磁铁和模型适应接口的外壳通过螺栓固定连接,电磁铁和模型适应接口中间的铁芯通过螺钉固定连接,外壳和铁芯形成磁极回路。
[0014]
进一步地,所述的模型适应接口与模型的上部外形相匹配,模型适应接口吸附并辅助定位模型的风洞轴向位置。
[0015]
进一步地,所述的模型设置有配套的模型安放架,模型安放架包括模型架和安装在模型架底部的把手,模型架从下至上托举模型并通过螺钉固定在吸附电磁铁的模型适应接口上,模型架的内腔设置有与模型的下部外形相匹配的内圆锥弧面,模型安放架辅助定位模型的风洞轴向位置。
[0016]
进一步地,所述的模型固定装置包括从上至下顺序连接的驱动电机、驱动减速机和齿轮箱,齿轮箱内设置有1个驱动齿轮和2个并列的从动齿轮,驱动齿轮与驱动减速机输出轴连接,每个从动齿轮的输出端分别与1个竖直的模型固定臂连接,每个竖直的模型固定臂的前端均固定有对应的水平的模型固定底板;驱动电机驱动驱动减速机转动带动齿轮箱中的驱动齿轮转动,驱动齿轮将转动分解给并列的从动齿轮,并列的从动齿轮带动模型两侧的模型固定臂放下或抬起,模型固定臂放下时,模型固定底板夹紧模型,模型固定臂抬起时,模型固定底板松开模型。
[0017]
进一步地,所述的驱动减速机为90
°
行星减速机。
[0018]
本发明的用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置在高超声速风洞试验准备时,模型处于等待吸附阶段,关闭吸附电磁铁的电源,模型固定装置夹紧并固定模型,避免由于吸附电磁铁工作时间太长而发热量增大且不能有效散热,引起的电磁铁的工作异常;在高超声速风洞试验前,模型处于等待高超声速风洞吹风阶段,打开吸附电磁铁的电源,放开模型固定装置,吸附电磁铁吸附并固定模型。
[0019]
本发明的用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置中的电磁铁与模型适应接口形成的磁极回路可根据模型的实际情况改变模型的吸附面积,具有灵活性。
[0020]
本发明的用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置中的模型适应接口可根据模型外形特性进行配套设计,更换不同外形模型只需更换配套的模型适应接口。
[0021]
本发明的用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置的支撑结构强度设计合理,能够承受高超声速风洞启动的冲击,不会出现影响气动力测量的模型振动等现象,该投放装置还是一个可靠的模型支撑装置,保证了风洞试验的安全性和试验结果的可靠性。
[0022]
本发明的用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置,机械设计结构紧凑、布局合理,适应于安装装置的空间大小有限的环境。
[0023]
本发明的用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置,不干涉发射后模型在流场中自由飞行的过程,飞行轨迹准确,可保证定量或定性地分析高超声速飞行器气动特性的准确性;
[0024]
本发明的用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置,结构紧凑、布局合理、使用方便、使用效率高、稳定性好、可靠性高,可满足高超声速风洞模型自由飞试验的要求,能够推广应用于低速、超声速风洞试验领域。
附图说明
[0025]
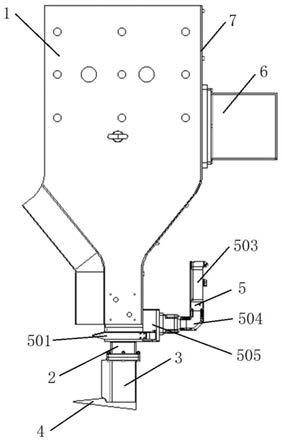
图1a为本发明的用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置的结构示意图(主视图);
[0026]
图1b为本发明的用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置的结构示意图(侧视图);
[0027]
图1c为本发明的用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置的结构示意图(立体图);
[0028]
图2为本发明的用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置中的安装基座结构示意图(立体图);
[0029]
图3为本发明的用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置中的吸附电磁铁结构示意图(剖面图)。
[0030]
图4a为本发明的用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置中的模型固定装置结构示意图(主视图);
[0031]
图4b为本发明的用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置中的模型固定装置结构示意图(侧视图);
[0032]
图4c为本发明的用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置中的模型固定装置结构示意图(立体图);
[0033]
图中,1.安装支板 2.安装基座 3.吸附电磁铁 4.模型 5.模型固定装置 6.驱动器 7.线缆封板;
[0034]
301.电磁铁 302.模型适应接口 303.螺钉 304.螺栓;
[0035]
501.模型固定底板 502.模型固定臂 503.驱动电机 504.驱动减速机 505.齿轮箱 506.从动轮507.驱动轮。
具体实施方式
[0036]
下面结合附图和实施例详细说明本发明。
[0037]
如图1a、图1b、图1c所示,本发明的用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置包括从上至下顺序连接的安装支板1、安装基座2、吸附电磁铁3,安装支板1的上端固定在高超声速风洞试验段攻角机构的上迎角机构上,吸附电磁铁3的下端吸附模型4;还包括固定在安装支板1上的驱动器6,固定在安装基座2上的模型固定装置5,驱动器6控制模型固定装置5夹紧或松开模型4。
[0038]
进一步地,所述的安装支板1的迎风面设置有尖劈。
[0039]
进一步地,所述的安装支板1的背风面内侧开有容纳线缆的槽,槽口通过线缆封板7封闭。
[0040]
进一步地,如图2所示,所述的安装基座2为倒t形结构,竖直端插入安装支板1,并通过螺钉连接、圆柱销定位与安装支板1固定连接;水平端通过螺钉固定连接吸附电磁铁3。
[0041]
进一步地,如图3所示,所述的吸附电磁铁3包括从上至下顺序连接的电磁铁301和模型适应接口302,电磁铁301和模型适应接口302的外壳通过螺栓304固定连接,电磁铁301和模型适应接口302中间的铁芯通过螺钉303固定连接,外壳和铁芯形成磁极回路。
[0042]
进一步地,所述的模型适应接口302与模型4的上部外形相匹配,模型适应接口302吸附并辅助定位模型4的风洞轴向位置。
[0043]
进一步地,所述的模型4设置有配套的模型安放架,模型安放架包括模型架和安装在模型架底部的把手,模型架从下至上托举模型4并通过螺钉固定在吸附电磁铁3的模型适应接口302上,模型架的内腔设置有与模型4的下部外形相匹配的内圆锥弧面,模型安放架辅助定位模型4的风洞轴向位置。
[0044]
进一步地,如图4a、图4b、图4c所示,所述的模型固定装置5包括从上至下顺序连接的驱动电机503、驱动减速机504和齿轮箱505,齿轮箱505内设置有1个驱动齿轮507和2个并列的从动齿轮506,驱动齿轮507与驱动减速机504输出轴连接,每个从动齿轮506的输出端分别与1个竖直的模型固定臂502连接,每个竖直的模型固定臂502的前端均固定有对应的水平的模型固定底板501;驱动电机503驱动驱动减速机504转动带动齿轮箱505中的驱动齿轮507转动,驱动齿轮507将转动分解给并列的从动齿轮506,并列的从动齿轮506带动模型4两侧的模型固定臂502放下或抬起,模型固定臂502放下时,模型固定底板501夹紧模型4,模型固定臂502抬起时,模型固定底板501松开模型4。
[0045]
进一步地,所述的驱动减速机504为90
°
行星减速机。
[0046]
以下实施例用于说明本发明,但不用来限制本发明的范围。
[0047]
实施例1
[0048]
本实施例的工作过程如下:
[0049]
a.将本发明的用于高超声速风洞模型自由飞试验的电磁铁悬挂投放装置通过安装支板1的上端固定在高超声速风洞试验段攻角机构的上迎角机构上;
[0050]
b.吸附电磁铁3上电,将模型4吸附在吸附电磁铁3的模型适应接口302上,调整模型4的位置,测量并保证模型4被吸附的轴向位置精确;
[0051]
c.握住模型安放架底部的把手,模型架从下至上托举模型4,将模型4放置在模型架内腔的内圆锥弧面中,模型架通过螺钉固定在吸附电磁铁3的模型适应接口302上,测量并保证模型4的轴向位置精确,吸附电磁铁3断电;
[0052]
d.高超声速风洞试验准备过程中,吸附电磁铁3上电,拆除模型安放架,并再一次测量并保证模型4被吸附的轴向位置精确;驱动器6和模型固定装置5上电,驱动器6控制驱动电机503,驱动电机503驱动减速机504转动,驱动减速机504带动齿轮箱505中的驱动齿轮507转动,驱动齿轮507将转动分解给并列的从动齿轮506,并列的从动齿轮506带动模型4两侧的模型固定臂502放下,模型固定底板501夹紧模型4,吸附电磁铁3断电;
[0053]
e.高超声速风洞试验前,吸附电磁铁3上电吸附模型4,驱动器6控制模型4两侧的
模型固定臂502抬起,模型固定底板501松开模型4,模型4仅依靠吸附电磁铁3吸附在模型适应接口302上;
[0054]
f.高超声速风洞试验过程中,吸附电磁铁3根据风洞控制系统指令断电释放模型4,模型4在高超声速风洞中自由飞,风洞数据采集系统对模型4进行高速摄影,风洞模型回收装置最后回收模型4。
[0055]
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域。对于熟悉本领域的人员而言,在不脱离本发明原理的前提下,可容易地实现另外的改进和润饰,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1