激光位移传感器测试机器人主从距离准确度方法及系统与流程
本发明属于遥操作机器人,具体涉及一种激光位移传感器测试机器人主从距离准确度方法及系统。
背景技术:
1、遥操作,是指操作者通过手控器、手柄等人机交互装置和设备控制远端的机器人完成作业任务的行为。操作者通过主机器人向从机器人发送指令,同时感受到从机器人和外界的交互信息,从而完成遥操作任务。当机器人处理复杂的感知和大量任务时,在快速做出决策和处理极端情况时,遥操作远远优于智能编程。目前遥操作已广泛应用在医疗领域、极端环境探索如太空与深海场景、防恐防暴应用场景,以及基于工业机械臂的自动化生产中。
2、为了确保检测过程的安全,遥操作机器人的性能检测至关重要,其绝对定位精度是机械臂的重要性能指标,定位精度更是直接关系着超声扫查的效果。目前,测试机械臂位移精度的获取,主要采用拉线编码器测量、双目视觉测量及激光跟踪仪测量等;但是,拉线编码器机构复杂,测量时标定步骤繁琐;双目视觉测量价格较高,精度较低;激光跟踪仪精度很高,但是价格昂贵,一般测量又无法承受,因此人们也一直在寻求一套性价比更高的机械臂位移精度获取方式。而针对机械臂位移精度的获取只是主从距离准确度的其中一个拦路因素;另一方面,当前针对遥操作机器人的主从距离准确度的测试,也仍然没有一套系列化的系统和方法,方法各不相同而又彼此保密,已知的碎片化的系统和方法又多较为复杂。因此,设计一种操作简单、成本低、精度达到遥操作机器人性能检测标准的主从距离准确度方法显然十分重要。
技术实现思路
1、本发明的目的是克服上述现有技术的不足,提供一种遥操作机器人主从距离准确度方法,该方法可以实现遥操作机器人主从距离准确度测试,并确保测试过程的简洁化和效率化,同时可大幅降低测试成本,性价比更高。
2、为实现上述目的,本发明采用了以下技术方案:
3、一种激光位移传感器测试机器人主从距离准确度方法,其特征在于包括以下步骤:
4、s1、将激光接收板安装在从端设备所在的遥操作机器人机械臂上,并设置激光位移传感器,使激光位移传感器所射出激光被激光接收板接收;
5、该激光接收板的面朝激光位移传感器的一侧设置彼此相交的第一表面和第二表面,相交处形成棱边,且第一表面在测试时垂直于激光位移传感器激光射出方向;第二表面在测试时作为激光位移传感器射出激光的受光面并提供一个位移数据采集点,所述棱边作为激光位移传感器射出激光的另一个位移数据采集点;
6、s2、通过采集激光位移传感器的激光在激光接收板上的位移数据,获得遥操作机器人机械臂在x轴和y轴方向上的实际位移数据,同时通过记录主端设备发送给遥操作机器人机械臂的读数和激光位移传感器的读数,获得遥操作机器人在x轴和y轴方向上的主从距离准确度。
7、优选的,所述步骤s2包括以下子步骤:
8、s21、测量起始点确认:
9、根据遥操作机器人机械臂需要测量位移的范围,选择遥操作机器人机械臂对应的水平位移,控制遥操作机器人机械臂沿水平方向移动至起始位置,将此时激光位移传感器在激光接收板第二表面上的激光照射位置标记为起始点;
10、s22、移动测量:
11、控制遥操作机器人机械臂沿水平方向移动,使激光位移传感器射出激光移动经过激光接收板的第二表面和第一表面;
12、s23、遥操作机器人机械臂位移数据采样与结果计算:
13、采集激光位移传感器的激光在起始点和棱边上时的位移数据,采用下式计算遥操作机器人机械臂在x轴和y轴方向上的实际位移数据:
14、
15、式中:
16、α1分别为激光接收板的第二表面和x轴方向的实际夹角;
17、α2分别为激光接收板的第二表面和y轴方向的实际夹角;
18、 x 1为激光位移传感器在x轴方向上起始点的读数;
19、 y 1为激光位移传感器在y轴方向上起始点的读数;
20、 x b为激光位移传感器在x轴方向上从起始点移动到棱边上时的读数;
21、 y b为激光位移传感器在y轴方向上从起始点移动到棱边上时的读数;
22、 x i为激光位移传感器在x轴方向上的第i次移动的读数;
23、 y i为激光位移传感器在y轴方向上的第i次移动的读数;
24、 x i+1为激光位移传感器在x轴方向上的第i+1次移动的读数;
25、 y i+1为激光位移传感器在y轴方向上的第i+1次移动的读数;
26、i表示为单次测量时,激光从起始点到测试完成过程中的第i次移动;
27、 i xb为激光在x轴方向上从起始点移动到棱边上时的移动次数;
28、 i yb为激光在y轴方向上从起始点移动到棱边上时的移动次数;
29、 x k为在x轴方向上对遥操作机器人机械臂发送的位移数据;
30、 y k为在y轴方向上对遥操作机器人机械臂发送的位移数据;
31、 p xi为遥操作机器人机械臂在x轴方向上的实际位移数据;
32、 p yi为遥操作机器人机械臂在y轴方向上的实际位移数据;
33、 p x’为在x轴方向上,激光经过激光接收板第一表面时经补偿后的实际位移数据;
34、 p y’为在y轴方向上,激光经过激光接收板第一表面时经补偿后的实际位移数据;
35、 i为激光接收板第一表面的水平方向长度,为常数;
36、s24、主从距离准确度数据采样与结果计算:
37、启动遥操作机器人,使其处于主从控制模式,将主端设备沿y轴方向移动指定距离,记录主端设备发送给遥操作机器人机械臂的读数和激光位移传感器的读数,并采用下式计算在x轴和y轴方向上的主从距离准确度:
38、
39、式中:
40、 x m为主端设备沿x轴方向的实际位移值;
41、 y m为主端设备沿y轴方向的实际位移值;
42、 x j为每次移动后主端设备发送给遥操作机器人机械臂沿x轴方向的移动距离;
43、 y j为每次移动后主端设备发送给遥操作机器人机械臂沿y轴方向的移动距离;
44、 ap x为遥操作机器人机械臂在x轴方向上的主从距离准确度;
45、 ap y为遥操作机器人机械臂在y轴方向上的主从距离准确度;
46、 n为单次测量时,激光从测量开始到测量结束总共移动的次数。
47、优选的,子步骤s21之前,首先进行遥操作机器人机械臂工具坐标系与激光位移传感器的标定工作,包括对遥操作机器人机械臂y轴和激光位移传感器射出激光方向进行标定、对遥操作机器人机械臂x轴和激光位移传感器射出激光的垂直方向进行标定以及对激光位移传感器射出激光落在激光接收板的棱边上进行标定。
48、优选的,对遥操作机器人机械臂y轴和激光位移传感器射出激光方向进行标定的具体过程为:控制遥操作机器人机械臂沿其工具坐标系y轴方向前后移动,移动过程中激光位移传感器射出激光始终落在激光接收板的第一表面中心位置,则完成标定;否则,控制遥操作机器人机械臂重新运动到起点位置,再绕工具坐标系的x轴和z轴旋转指定角度后,重复沿遥操作机器人机械臂工具坐标系y轴方向的前后移动及确认激光落点位置的操作,反复调节直至遥操作机器人机械臂沿工具坐标系y轴方向前后移动时,激光始终落在激光接收板的第一表面中心位置,完成标定。
49、优选的,对遥操作机器人机械臂x轴和激光位移传感器射出激光的垂直方向进行标定的具体过程为:控制遥操作机器人机械臂,使激光位移传感器射出激光在激光接收板第一表面的最左端移动到最右端,若激光位移传感器的读数变化大于设定目标阈值,则控制遥操作机器人机械臂绕其工具坐标系的z轴旋转指定角度,直至激光在此过程中读数变化小于或等于设定目标阈值,则停止转动,完成标定。
50、优选的,对激光位移传感器射出激光落在激光接收板的棱边上进行标定的具体过程为:控制遥操作机器人机械臂沿其工具坐标系x轴方向移动,使激光位移传感器射出激光在激光接收板第一表面与第二表面上重复移动,在激光由激光接收板第一表面向第二表面移动的过程中,当激光位移传感器读数发生变化时,停止遥操作机器人机械臂运动,完成标定。
51、优选的,所述第一表面处设有用于标定激光位移传感器激光射出方向的环形靶心,第二表面上设有用于标定激光接收板的水平状态的水平刻度线。
52、优选的,所述激光接收板的上板面处设有用于安装和定位激光接收板与遥操作机器人机械臂相对位置的回转定位槽。
53、优选的,令第二表面沿激光位移传感器激光射出方向的高度差为h,所述高度差h与激光位移传感器的量程r之间满足下式:
54、
55、其中, μ为所述高度差h与所述量程r之间的比例系数;
56、同时,令第二表面与垂直于激光位移传感器激光射出方向的校正面的夹角为α,α满足下式:
57、
58、其中, v为比例系数;m为实际测量范围;
59、同时,令第二表面和第一表面沿垂直于激光位移传感器激光射出方向的总水平长度为d,该总水平长度d与所述高度差h及所述夹角α之间满足下式:
60、。
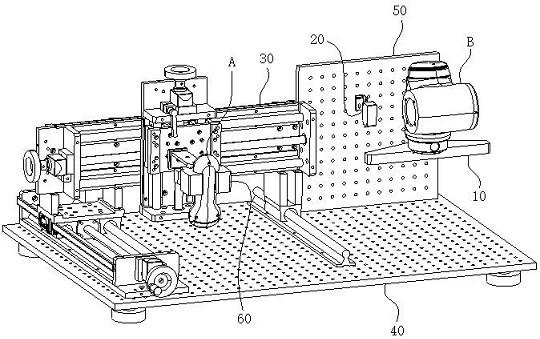
61、优选的,系统,该系统应用所述的激光位移传感器测试机器人主从距离准确度方法,其特征在于:包括作为水平安装基准的安装平台以及布置在安装平台上的三轴滑台,三轴滑台的x轴滑组的滑移动作方向与安装平台处坐标系的x轴方向平行,三轴滑台的y轴滑组的滑移动作方向与安装平台处坐标系的y轴方向平行,三轴滑台的z轴滑组的滑移动作方向与安装平台处坐标系的z轴方向平行,三轴滑台的z轴滑组的动作端设置用于固定主端设备的安装夹具;安装平台上还设置有板面垂直安装平台所在平面的竖直安装板,竖直安装板上安装有所述激光位移传感器。
62、优选的,所述安装平台为光学平板;所述z轴滑组包括可在铅垂方向上作往复直线动作的z轴滑块,该z轴滑块构成所述动作端,该动作端上水平贯穿布置用于螺纹配合安装夹具的安装孔;所述安装夹具包括用于直接夹持主端设备且槽长方向为铅垂向的夹口,夹口的尾端与l状的延伸臂的水平段彼此固接,l状的延伸臂的铅垂段螺纹配合在所述动作端处。
63、本发明的有益效果在于:
64、1)本发明可实现对遥操作机器人机械臂的位移精度,乃至主从距离准确度的精确测量。一方面,本发明通过采用具有标定功能的量程小、精度高的激光位移传感器,省去了专门的标定模组,在测试过程中可达到简洁化和效率化的要求,并大幅降低测试成本。另一方面,激光位移传感器的精度高带来的缺陷是量程小,会导致量程范围小于待测遥操作机器人机械臂的实际位移值,因此在系统中配置了激光接收板,以解决激光位移传感器量程小的问题。更具体而言,本发明利用了激光接收板上的具备折角状配合的第一表面和第二表面,从而能有效的增大激光位移传感器的位移测量范围,也降低了对激光位移传感器量程的要求,使得激光位移传感器能够在适用于本技术的测试环境并达到所需测试精度的同时,有效降低的实际测试成本,一举多得。
65、2)本发明的方法中,通过利用反三角函数校验受光面与激光发射方向的夹角,从而避免了角度误差,能进一步提高了测试的精确性。
66、3)在上述方法的基础上,本发明还提供有一套相配套的系统。实际工作时,通过设置水平基准平面也即安装平台,并利用三轴滑台的高动作精度及稳定性和光学平板的便捷拆装特点,可实现对动作端处主端设备的稳定驱动功能。同时,依靠在主端设备旁侧处的安装平台上增设竖直安装板,从而建立起了从端设备的操作平台,能更为方便的完成对遥操作机器人主从距离准确度测试功能,其具备了成本低、效率高和使用简洁稳定的功能。
- 还没有人留言评论。精彩留言会获得点赞!