一种车辆驾驶模拟器三自由度控制方法及电子设备与流程
1.本发明涉及一种车辆驾驶模拟器三自由度控制方法,属于车辆驾驶模拟的技术领域。
背景技术:
2.车辆驾驶模拟器是一种能模拟汽车驾驶的仿真系统。目前的车辆驾驶模拟器是集三维实时动画、人工智能、数据通信、网络、多媒体、机械等多种技术为一体的仿真技术,主要用于准备参加驾培考试的学员培训,以实现绿色、健康环保的驾驶体验。然而传统的模拟器无法真实展现车辆在不同道路上的颠簸及制动等自由度反馈。因此自由度反馈在新一代驾驶模拟器中的应用显得尤为重要。
3.目前大部分的三自由度反馈存在以下缺点:1)硬件独立性强,无法很好的与现有模拟器硬件结合;2)体验感弱,存在一些固定震感的自由度模拟器,无法真实实时的展现模拟器车辆行驶过程的反馈。
技术实现要素:
4.为了克服现有技术中存在的不足,本发明提供一种车辆驾驶模拟器三自由度控制方法及电子设备,结合硬件以解决现有技术中存在的模拟器无震感或固定震感等问题。
5.本发明公开的车辆驾驶模拟器三自由度控制方法,主要包括如下步骤:
6.将车辆驾驶模拟器通过abc三个衔接点固定在三自由度平台上,与三自由度平台形成一个整体;所述三自由度平台采用曲柄连杆结构,具有呈等腰三角形排布的三个电机,所述abc三个衔接点分别位于三个电机处;通过所述电机驱动相应衔接点上下运动实现三自由度平台的上下运动和前后左右偏移,进而控制车辆驾驶模拟器的三自由度运动;
7.构建等腰
△
abc,所述等腰
△
abc的顶点为衔接点a,底边上的两点分别为衔接点b、c;
8.依据等腰三角形三线合一的特性,计算所述等腰
△
abc的外接圆的半径r;
9.以所述等腰
△
abc的外接圆的圆心o为原点建立左手三维坐标系,其中,为z轴正方向,为x轴正方向,
△
平面abc的法向量为y轴正方向;
10.计算所述衔接点a、b、c三点在左手坐标系中的坐标,其中,a点的坐标为(0,0,r),b点的坐标为c点的坐标为
11.实时获取模拟场景中的受控车辆在x和z轴的旋转角度,得到围绕z轴、y轴、x轴旋转的变换矩阵r
zyx
(α,β,γ),通过矩阵变换计算出a、b、c三点旋转后的位置坐标,将r
zyx
(α,β,γ)代入后,得到绕x、z轴旋转后的a
′
、b
′
、c
′
三点坐标,旋转后的衔接点a
′
、b
′
、c
′
构成的平面信息即为车辆模拟器所处的实时路况;
12.分别计算三个电机的脉冲增量,将三自由度平台运行到中位的脉冲值分别加上脉
冲增量得到三个电机的最终运动量,将电机最终运动量实时传送至三自由度平台的控制器中,由此完成三自由度控制;所述脉冲增量计算公式为:式中,h表示a
′
、b
′
、c
′
三点y轴的坐标值的绝对值,δ为曲柄旋转角度,i表示减速比,m表示曲柄连杆结构的机械臂长。
13.进一步的,所述三自由度平台上下升降时包括归零位、中位、高位三个位置,在中位时进行上下升降和前后左右偏移。
14.进一步的,实时获取车辆在x和z轴的旋转角度,得到围绕z轴、y轴、x轴旋转的变换矩阵r
zyx
(α,β,γ),通过矩阵变换计算出a、b、c三点旋转后的位置坐标,将r
zyx
(α,β,γ)代入后,得到绕x、z轴旋转后的a
′
、b
′
、c
′
三点坐标具体包括:
15.实时获取车辆在x和z轴的旋转角度,其中,x轴旋转代表三自由度的前后偏移,z轴代表三自由度的左右偏移,y轴旋转用于六自由度的位置平移,在三自由度中不考虑y轴的旋转,旋转后的衔接点a
′
、b
′
、c
′
构成的平面状态即为车辆模拟器的实时路况,得到:
[0016][0017]
式中,α表示绕x轴的旋转角度,β表示绕y轴的旋转角度,γ表示绕z轴的旋转角度,r
zyx
(α,β,γ)表示围绕z轴、y轴、x轴旋转的变换矩阵;
[0018]
通过矩阵变换,分别计算出a、b、c三点旋转后的位置坐标:
[0019][0020]
将r
zyx
(α,β,γ)代入后,得到abc绕x、z轴旋转后的a
′
、b
′
、c
′
三点坐标即:
[0021][0022][0023]
[0024]
式中,a点坐标为b点坐标为c点坐标为
[0025]
进一步,可通过模拟器仿真软件获取模拟场景中受控车辆在x和z轴的旋转角度。
[0026]
本发明还公开一种电子设备,其包括处理器和存储器,所述处理器用于调用存储器中存储的计算机程序,执行上述任意一项方案所述的车辆驾驶模拟器三自由度控制方法。
[0027]
本发明能大大提升了车辆物理的真实感、用户体验感,具体表现在:本发明能真实有效模拟车辆的运动状态,反馈车辆在任意道路上的实时路况;本发明采用数学运算方式计算得到当前车辆姿态的电机增量,并实时传输至控制器,促使电机转动,计算量非常小,具有较高的实时性。
附图说明
[0028]
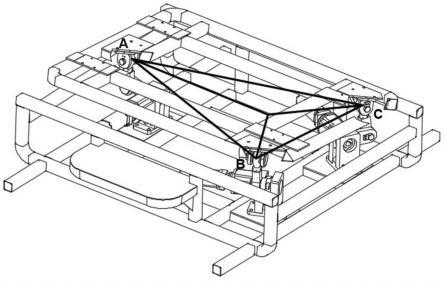
图1为三自由度平台结构示意图;
[0029]
图2为曲柄连杆结构示意图;
[0030]
图3为三自由度平台中位示意图;
[0031]
图4为三自由度平台偏移示意图;
[0032]
图5为三维坐标系俯视图;
[0033]
图6为a、b、c三点位置计算辅助线的示意图。
具体实施方式
[0034]
下面结合实施例和附图对本发明的的技术方案作进一步解释说明。
[0035]
实施例1公开一种车辆驾驶模拟器三自由度控制方法,主要包括如下步骤:
[0036]
s1:将车辆模拟器通过abc三个衔接点固定在三自由度平台上,与三自由度平台形成一个整体。
[0037]
三自由度平台采用曲柄连杆结构,由三个电机通过曲柄连杆结构驱动整个平台的上升、下降和左右前后偏移,其结构示意图如图1所示。具体的,三自由度平台(简称“平台”)可采用申请号为2022218085841的实用新型专利公开的“三自由度动感平台”的结构实现。三自由度平台的工作原理为:通过电机的旋转产生一个1:80的减速比(即为电机转动80圈,曲柄连杆转动一圈),每转脉冲数ppr为10000。平台上下升降时主要分为归零位、中位、高位。设定平台在中位进行前后左右偏移和上下升降,平台升降偏移都是通过图2所示的曲柄连杆结构的升降实现,图3为自由度平台的中位示意图。三个电机排布方式如图1所示,a、b、c三点为平台与模拟器衔接点,呈等腰三角形排布,每个电机控制一个衔接点(a、b、c)的上下运动。依据三点确定一个平面的数学原理,a、b、c三点可构成一个平面abc,其中平面abc会根据a、b、c三点不同的上下运动实现平面的上下运动和前后左右偏移。本发明以三自由度平台中位为基准位,建立数学模型,模拟车辆的真实运动状况。
[0038]
s2:在平面abc上构建三维坐标系,建立三个点abc的等腰三角形基础数学模型
△
abc,其中,a为顶点,b、c分别为底边上的两点。
[0039]
a、b、c三点为模拟器与平台的衔接点,车辆模拟器通过a、b、c三点固定在平台上,并跟随平台运动,形成一个整体,可将abc三个衔接点构成的平面视为整体的代表。在平面abc上,以a、b、c三点构建等腰
△
abc,其中,a为顶点,b、c分别为底边上的两点。
△
abc的运动代表整体的运动,a、b、c三点的单独升降代表电机控制曲柄连杆结构运动展现,
△
abc的运动代表平面abc的运动,也即模拟器与三自由度平台形成的整体的运动。
[0040]
s3:依据等腰三角形三线合一特性,计算出三角形的外接圆圆心的半径。
[0041]
基于等腰三角形三线合一属性特性(即等腰三角形顶角的中角平分线、底边的中线、底线的高线,三条线互相重合),外接圆的圆心在底边的高线上。做等腰三角形的底边的垂直辅助线,此辅助线经过外接圆的圆心o,做底边高与bc的交点为d,参见图5所示,则由于
△
obd为直角三角形,则由于od+oa=od+r=ad,因此求出
△
abc的外接圆的半径外接圆圆心到底边bc的距离,也即
[0042]
s4:在
△
abc的外接圆的圆心为原点建立左手三维坐标系,计算a、b、c三点在左手坐标系中的坐标信息。
[0043]
如图6所示,以圆心o为坐标系原点即坐标位置为(0,0,0),为z轴正方向,为x轴正方向,
△
平面abc的法向量为y轴正方向,建立以o为原点的三维左手坐标系。
[0044]
计算a、b、c三点在左手坐标系中的坐标信息,其中,a点位置信息为(0,0,r),b点位置信息为c点位置信息为
[0045]
s5:通过模拟器仿真软件(unity3d)实时获取模拟场景中自车(即受控车辆)在x和z轴的旋转角度(车辆姿态),其中x轴旋转代表三自由度的前后偏移,z轴旋转代表三自由度的左右偏移,y轴旋转用于六自由度的位置平移,因此在三自由度中不考虑y轴的旋转,旋转后的a
′
、b
′
、c
′
三点构成的平面信息即反应了车辆模拟器所处的实时路况(颠簸、骑轧路牙、上下坡等),图4为a
′
、b
′
、c
′
三点构成平面的偏移示意图。
[0046]
依据数据空间坐标系转换公式,可知旋转变换矩阵为:
[0047][0048]
矩阵相乘可得:
[0049][0050]
根据三自由度原理,不考虑y轴旋转带来的转换影响,即y轴旋转角度为0,得到:
[0051][0052]
式中,α表示绕x轴的旋转角度,β表示绕y轴的旋转角度,γ表示绕z轴的旋转角度,r
zyx
(α,β,γ)表示围绕z轴、y轴、x轴旋转的变换矩阵。
[0053]
s6:通过矩阵变换,分别计算出a、b、c三点旋转后的位置坐标。
[0054][0055]
将r
zyx
(α,β,γ)代入后,得到abc绕x、z轴旋转后的a
′
、b
′
、c
′
三点坐标即:
[0056][0057][0058][0059]
式中,a点坐标为b点坐标为c点坐标为
[0060]
s7:分别计算三个电机的脉冲增量,将三自由度平台运行到中位的脉冲值分别加上脉冲增量即为三个电机的最终运动量,将电机最终运动量实时传送至三自由度平台的控制器中,由此完成三自由度控制。
[0061]
三自由度平台原理是通过控制器驱动三轴电机转动,进而通过曲柄连杆驱动平台的运动。依据图2曲柄结构示意图可知,a
′
、b
′
、c
′
的y轴坐标近似为曲柄的垂直运行距离,曲柄旋转角度为其中h表示a
′
、b
′
、c
′
三点y轴的坐标值的绝对值。依据三自由度平台的硬件参数,例如,曲柄连杆结构的机械臂长m为0.11米,减速比(i)为80:1,每转脉冲数(ppr)为10000,则增量脉冲数(cpr)计算公式为
[0062]
将计算出来的增量脉冲数加上三自由度平台运行到中位的脉冲数即为电机的脉冲数,将最终脉冲数实时传送至三自由度平台的控制器中,由此完成三自由度控制。
[0063]
综上可见,本发明具有如下优点:(1)反应车辆运动的真实性,本发明通过建立左手三维坐标系,以能代表平台运动的a、b、c三点为基础,通过矩阵变换等方式得到模拟场景
中三点构成的平面信息,并基于此计算电机最终运动量,并将最终运动量传输至控制器,由此呈现车辆的实时路况,包括任意颠簸、起轧路牙、上下坡等,还能一定程度反应出颠簸的大小和剧烈程度;(2)提升车辆运动反馈的实时性,本发明实时获取模拟场景中车辆姿态,采用数学运算方式计算当前车辆姿态产生的电机脉冲增量,并实时的传输至控制器,促使电机转动,相较于构建模型等方式计算量较小,延时非常小。
[0064]
进一步,实施例2还公开一种电子设备,其主要包括处理器和存储器,处理器主要用于调用存储器中存储的计算机程序并执行实施例1中所提供的车辆驾驶模拟器三自由度控制方法,具体实施步骤此处不再赘述。
[0065]
最后需要说明的是,尽管以上结合附图对本发明的实施方案进行了描述,但本发明并不局限于上述的具体实施方案和应用领域,上述的具体实施方案仅仅是示意性的、指导性的,而不是限制性的。本领域的普通技术人员在本说明书的启示下,在不脱离本发明权利要求所保护的范围的情况下,还可以做出很多种的形式,这些均属于本发明保护之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1