一种非接触式搬运晶元的机构的制作方法
[0001]
本发明属于晶元生产制造技术领域,具体的说是一种非接触式搬运晶元的机构。
背景技术:
[0002]
晶元是指制作硅半导体电路所用的硅晶片,其原始材料是硅。高纯度的多晶硅溶解后掺入硅晶体晶种,然后慢慢拉出,形成圆柱形的单晶硅。硅晶棒在经过研磨,抛光,切片后,形成硅晶元片,也就是晶元。
[0003]
在半导体晶元制作中,拉单晶、切片、磨片、抛光、增层、光刻、掺杂、热处理、针测以及划片一系列过程,同时化学气相沉淀、光学显影、化学机械研磨和搬运这些过程中都可能使晶元表面的图形产生缺陷,特别是半导体晶元上下两面都有图形的条件下,晶元在搬运过程中,机械手末端执行器直接接触到半导体晶元表面会划伤半导体晶元的表面,导致半导体晶元报废;
[0004]
现有的半导体晶元搬运方式为接触式搬运,例如在申请号为2012800359935中提供的末端作用器装置及具备该末端作用器装置的基板搬运用机械手,该基板搬运用机械手上的多个爪片在支撑搬运半导体晶元时,爪片直接与半导体晶元接触,爪片会将半导体晶元表面划伤,因此不益于半导体晶元的搬运。
[0005]
鉴于上述问题,设计一种通过气体鼓吹方式搬运半导体晶元,在半导体晶元与机械手末端执行器之间形成一层气隙,避免机械手末端执行器直接接触到半导体晶元表面会划伤半导体晶元表面现象的发生。
技术实现要素:
[0006]
为了弥补现有技术的不足,以解决背景技术所描述的问题,本发明提出了一种非接触式搬运晶元的机构,通过气体鼓吹方式搬运半导体晶元,气体在半导体晶元与机械手末端执行器之间形成一层气隙,使得半导体晶元不会与机械手末端执行器直接接触,从而保护了半导体晶元表面图形不会被划伤。
[0007]
本发明解决其技术问题所采用的技术方案是:本发明所述的一种非接触式搬运晶元的机构,包括取片机构;所述取片机构包括机械手末端执行器、进气管和管道;所述机械手末端执行器整体呈扁平状,机械手末端执行器的一端呈字母“u”形状,机械手末端执行器的一端开口朝向外界,机械手末端执行器的一端部位开设凹部;所述凹部用于承载被搬运的晶元,凹部内边缘位置开设多个吹气孔,且每个吹气孔与进气管的一端连通;所述进气管固接在机械手末端执行器的另一端上板面,且进气管的另一端通过管道连通外界鼓气设备。
[0008]
优选的,所述凹部的形状与被搬运晶元的形状相适配。
[0009]
优选的,所述凹部的内侧壁与被搬运晶元的外边缘间隙配合。
[0010]
优选的,所述机械手末端执行器的一端每个分支上各自均匀开设两个吹气孔;所述凹部内底面靠近进气管的部位均匀开设四个吹气孔。
[0011]
优选的,所述管道上设有气压监控设备;所述气压监控设备用于检测管道内气压变化。
[0012]
优选的,所述凹部内部开设多条气道;所述气道连通吹气孔与进气管。
[0013]
本发明的技术效果和优点:
[0014]
气体冲击在半导体晶元上,由于半导体晶元遮盖住凹部内的吹气孔排气位置,因此气体排出时气体对半导体晶元产生向上的推力,然后半导体晶元被气体托起并悬空在凹部内,此时半导体晶元与凹部之间形成一层气隙,然后机械手末端执行器通过气体将半导体晶元拖运到指定位置,拖运过程中半导体晶元未与机械手末端执行器直接接触,该搬运过程通过气体鼓吹方式搬运半导体晶元,气体在半导体晶元与机械手末端执行器之间形成一层气隙,使得半导体晶元不会与机械手末端执行器直接接触,从而保护了半导体晶元表面图形不会被划伤。
[0015]
通过气压监控设备检测到管道内气压发生变化,从而间接地检测出被搬运晶元是否在机械手末端执行器上的凹部内,继而确定机械手末端执行器是否要进行搬运动作,避免机械手末端执行器做无效搬运动作。
附图说明
[0016]
下面结合附图和实施方式对本发明进一步说明。
[0017]
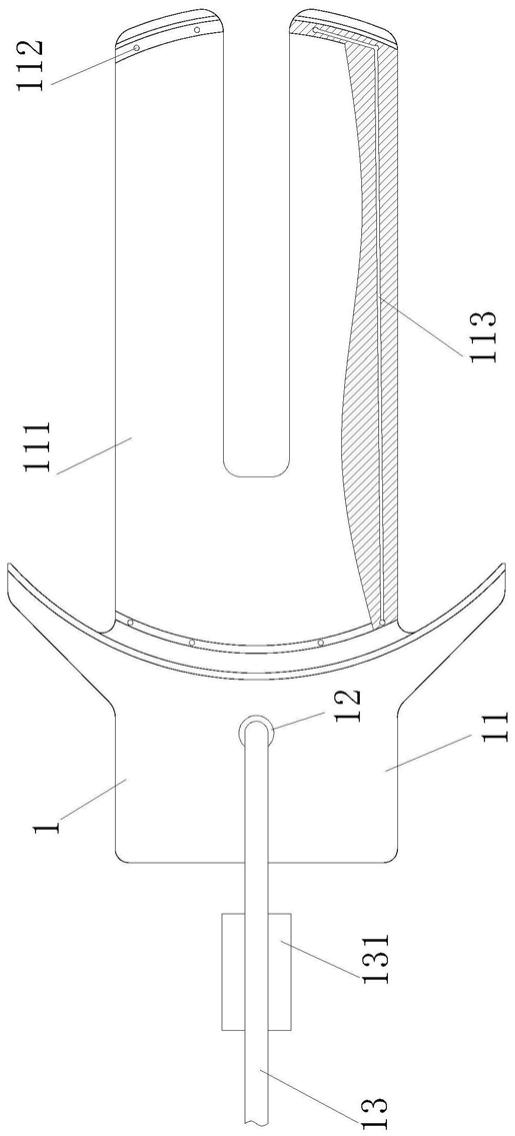
图1是本发明中机械手末端执行器的结构示意图;
[0018]
图2是本发明中机械手末端执行器与晶元的配合图;
[0019]
图3是本发明中机械手末端执行器与晶元配合的侧视图;
[0020]
图4是图3中a处的局部放大图;
[0021]
图中:取片机构1、机械手末端执行器11、凹部111、吹气孔112、气道113、进气管12、管道13、气压监控设备131、晶元2。
具体实施方式
[0022]
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合实施方式,进一步阐述本发明。
[0023]
如图1至图4所示,本发明所述的一种非接触式搬运晶元的机构,包括取片机构1;所述取片机构1包括机械手末端执行器11、进气管12和管道13;所述机械手末端执行器11整体呈扁平状,机械手末端执行器11的一端呈字母“u”形状,机械手末端执行器11的一端开口朝向外界,机械手末端执行器11的一端部位开设凹部111;所述凹部111用于承载被搬运的晶元2,凹部111内边缘位置开设多个吹气孔112,且每个吹气孔112与进气管12的一端连通;所述进气管12固接在机械手末端执行器11的另一端上板面,且进气管12的另一端通过管道13连通外界鼓气设备;在半导体晶圆制作中,拉单晶、切片、磨片、抛光、增层、光刻、掺杂、热处理、针测以及划片一系列过程,同时化学气相沉淀、光学显影、化学机械研磨和搬运这些过程中都可能使晶圆表面的图形产生缺陷,特别是半导体晶元2上下两面都有图形的条件下,晶元2在搬运过程中,机械手末端执行器11直接接触到半导体晶元2表面会划伤半导体晶元2的表面,导致半导体晶元2报废,为此设计一种通过气体鼓吹方式搬运半导体晶元2,气体在半导体晶元2与机械手末端执行器11之间形成一层气隙,使得半导体晶元2不会与机
械手末端执行器11直接接触,从而保护了半导体晶元2表面图形不会被划伤;首先将半导体晶元2放置在凹部111,此时机械手末端执行器11处于静止状态,然后外界鼓气设备将气体通过管道13打入到进气管12内,然后进气管12再将气体分布到每个吹气孔112内,接着气体从吹气孔112内排出,气体冲击在半导体晶元2上,由于半导体晶元2遮盖住凹部111内的吹气孔112排气位置,因此气体排出时气体对半导体晶元2产生向上的推力,然后半导体晶元2被气体托起并悬空在凹部111内,此时半导体晶元2与凹部111之间形成一层气隙,然后机械手末端执行器11通过气体将半导体晶元2拖运到指定位置,拖运过程中半导体晶元2未与机械手末端执行器11直接接触,从而保护了半导体晶元2表面图形不会被划伤。
[0024]
作为本发明的一种具体实施方式,所述凹部111的内侧壁与被搬运晶元2的外边缘间隙配合;凹部111的内侧壁与被搬运晶元2的外边缘间隙配合,使得被搬运晶元2便于放入凹部111以及从凹部111取出。
[0025]
作为本发明的一种具体实施方式,所述机械手末端执行器11的一端每个分支上各自均匀开设两个吹气孔112;所述凹部111内底面靠近进气管12的部位均匀开设四个吹气孔112;凹部111内八个吹气孔112位置的设计,气体冲击在被搬运晶元2后,可使得被搬运晶元2处于水平状态进行搬运,从而避免被搬运晶元2处于倾斜状态搬运时,被搬运晶元2摆动倾斜后从机械手末端执行器11上脱落现象的发生。
[0026]
作为本发明的一种具体实施方式,所述管道13上设有气压监控设备131;所述气压监控设备131用于检测管道13内气压变化;被搬运晶元2遮盖住吹气孔112的孔端时,管道13内部气压压强会增加,气压监控设备131通过公式p=kgf/s(p为管道13内压强,kgf为被搬运晶元2的重力,s为吹气孔112孔面积之和,kgf的大小由0变化到被搬运晶元2的重力)检测到管道13内压强发生变化,从而间接地检测出被搬运晶元2是否在机械手末端执行器11上的凹部111内,继而确定机械手末端执行器11是否要进行搬运动作,避免机械手末端执行器11做无效搬运动作。
[0027]
工作原理:首先将半导体晶元2放置在凹部111,此时机械手末端执行器11处于静止状态,然后外界鼓气设备将气体通过管道13打入到进气管12内,然后进气管12再将气体通过气道113鼓入到每个吹气孔112内,接着气体从吹气孔112内排出,气体冲击在半导体晶元2上,由于半导体晶元2遮盖住凹部111内的吹气孔112排气位置,因此气体排出时气体对半导体晶元2产生向上的推力,然后半导体晶元2被气体托起并悬空在凹部111内,此时半导体晶元2与凹部111之间形成一层气隙,然后机械手末端执行器11通过气体将半导体晶元2拖运到指定位置,拖运过程中半导体晶元2未与机械手末端执行器11直接接触,从而保护了半导体晶元2表面图形不会被划伤。
[0028]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1