一种动中通相控阵天线波束控制系统的制作方法
1.本发明涉及天线领域,具体涉及一种动中通相控阵天线波束控制系统。
背景技术:
2.在卫星通信领域,卫星通信系统是指利用人造地球卫星作为中继站转发或发射无线电波,实现两个或多个地球站之间或地球站与航天器之间通信的一种通信系统。
3.动中通是指“移动中的卫星地面站通信系统”的简称。车辆、轮船、飞机等平台在运动过程中的姿态和地理位置持续变化,造成天线波束的偏移和滚动,容易造成信号减弱或丢失,需要采用动中通天线。通过动中通系统,车辆、轮船和飞机等移动的载体在运动过程中可实时跟踪卫星等平台,不间断的传输语音、数据、图像等多媒体信息,满足各种军民应急通信和移动条件下的多媒体通信的需求。
4.传统的动中通抛物面天线和平板天线,控制系统均为伺服控制,伺服控制受电子罗盘、陀螺仪等器件的影响,扫描精度和反应灵敏度有限,很难维持灵活机动地进行波束切换达成高速运动天线载体的实时跟踪。
技术实现要素:
5.本发明所要解决的技术问题是:现有天线控制系统采用伺服控制,反应灵敏度有限,很难维持灵活机动地切换波束,达到实时跟踪高速运动天线载体的目的。为了解决上述问题,本发明提出一种动中通相控阵天线波束控制系统。
6.本发明通过下述技术方案实现:
7.一种动中通相控阵天线波束控制系统,包括fpga控制模块和dsp控制模块;所述fpga控制模块与dsp控制模块连接;
8.所述fpga控制模块用于接收相控阵天线载体的地球位置信息(经纬度)、相控阵天线载体的姿态信息(偏航角、俯仰角、横滚角)和来自基带单元的星历数据,将所述星历数据、地球位置信息和姿态信息发送给所述dsp控制模块;
9.所述dsp控制模块根据所述星历数据、地球位置信息和姿态信息,进行波束指向角度解算,得到波束指向方位角信息和波束指向俯仰角信息,并将所述波束指向方位角信息和波束指向俯仰角信息,发送给所述fpga控制模块;
10.所述fpga控制模块用于根据来自基带单元的波束控制指令,对所述波束指向方位角信息和波束指向俯仰角信息进行波束解算,得到接收组件阵列中各天线单元目标波束指向的移相控制码和幅度控制码,并将所述接收组件阵列中各天线单元目标波束指向的移相控制码和幅度控制码,发送给所述接收组件阵列;还得到发射组件阵列各天线单元目标波束指向的移相控制码和幅度控制码,并将所述发射组件阵列中各天线单元目标波束指向的移相控制码和幅度控制码,发送给所述发射组件阵列。
11.本发明一种动中通相控阵天线控制系统,不需要伺服控制,而是采用fpga+dsp的控制系统架构,fpga具有丰富的可配置逻辑模块和i/o模块,可以实现较大规模相控阵天线
阵列发射组件和接收组件的波束解算和控制功能;dsp具有强大的数据处理能力和高运行速度,可以实现“动中通”相控阵天线通信卫星的星历数据快速解算。fpga控制模块将接收到星历数据、相控阵天线载体的地球的位置信息和相控阵天线载体的地球的姿态信息转发给dsp控制模块,由dsp控制模块进行波束指向角度解算,将波束指向角度解算得到的波束指向方位角和俯仰角信息回传给fpga控制模块,fpga控制模块接收基带单元下发的波束控制指令和接收dsp控制模块回传的波束指向方位角和俯仰角信息,经过波束解算,计算出所述发射组件阵列和所述接收组件阵列各天线单元的目标波束指向的移相控制码和幅度控制码,并发送给所述发射组件阵列和所述接收组件阵列各天线单元,实现接收和发射波束方向图的合成,不同的移相控制码和幅度控制码能够改变天线方向图最大值的指向,通过控制发射波束和接收波束的指向可以完成卫星通信信号的发送和接收。fpga+dsp的组合控制系统,可以最大限度提高相控阵天线波束控制系统波束控制实时性、稳定性、快速性、准确性和可靠性,达到快速波束扫描的目的,在动中通卫星通信中更易实现高速运动天线载体的实时跟踪。
12.所述fpga控制模块用于接收agc电压值和来自信标接收机的锁定指示信号,得到波束指向角的精准度,并对波束指向角进行修正;所述fpga控制模块用于接收来自基带单元的发射频率信息和接收频率信息,并将所述发射频率信息和接收频率信息发送给信道模块。
13.优选的,还包括一次电源模块、二次电源模块a、二次电源模块b、二次电源模块c,所述一次电源模块用于实现电压转换,并将转换后的电压发送给所述二次电源模块a、所述二次电源模块b和所述二次电源模块c;所述二次电源模块a用于实现电压转换,并给所述控制系统的各模块供电;所述二次电源模块b用于实现电压转换,并给外部发射组件阵列供电;所述二次电源模块c用于实现电压转换,并给外部接收组件阵列供电。
14.所述一次电源模块与二次电源模块a、二次电源模块b和二次电源模块c均采用连接器连接;所述一次电源模块将外部一次电源24v隔离转换为12v提供给二次电源模块a、二次电源模块b和二次电源模块c;所述二次电源模块a与波束控制系统各模块通过pcb布线连接;所述二次电源模块a接收一次电源模块供电12v,并转换成1v、1.2v、1.8v、3.3v和5v,给波束控制系统各模块供电;所述二次电源模块b与相控阵天线发射组件阵列采用连接器连接;所述二次电源模块b接收一次电源模块供电12v,并转换成1.8v,给相控阵天线发射组件阵列供电;所述二次电源模块c与相控阵天线接收组件阵列采用连接器连接;所述二次电源模块c接收一次电源模块供电12v,并转换成1.8v,给相控阵天线接收组件阵列供电。
15.本发明集成两级电源转换模块,一次电源模块将外部一次电源24v隔离转换为12v提供给相控阵波束控制系统,经二次电源模块a将12v转换为波束控制电路所需的1v、1.2v、1.8v、3.3v和5v供电,可以实现波控系统供电与外部供电的电气隔离,确保了波控系统供电的稳定性。同时经二次电源模块b、二次电源模块c分别将12v转换为发射组件阵列和接收组件阵列所需的1.8v电压,通过排针连接器直接给发射组件阵列和接收组件阵列供电,降低了因发射组件阵列和接收组件阵列低电压、大电流工作产生的传输线路压降,提高了发射组件阵列和接收组件阵列的可靠性。
16.优选的,还包括gnss/ins组合导航模块、信号调理模块、adc采集模块和接口模块,所述gnss/ins组合导航模块、信号调理模块和adc采集模块分别与所述fpga控制模块连接,
所述gnss/ins组合导航模块用于检测相控阵天线载体的地球位置信息和姿态信息,并将地球位置信息和姿态信息发送给所述fpga控制模块;所述信号调理模块用于对信标接收机输出的agc电压进行滤波和隔离,并经adc转换后发送给所述fpga控制模块;所述adc采集模块用于检测一次电源模块的供电电压和电流,将一次电源模块输出的电压电流模拟信号转换为数字信号传输给fpga控制模块;所述接口模块包括:基带通信接口、信标接收机通信接口、信道通信接口、风扇控制接口、发射组件阵列控制接口和接收组件阵列控制接口;所述基带通信接口,与所述fpga控制模块连接,用于实现fpga控制模块与基带单元之间的通信;所述信标接收机通信接口,与所述fpga控制模块连接,用于实现fpga控制模块与信标接收机之间的通信;所述信道通信接口,与所述fpga控制模块连接,用于实现fpga控制模块与信道之间的通信;所述风扇控制接口,与所述fpga控制模块连接,用于实现fpga控制模块对相控阵天线散热风扇组的开关控制和调速控制功能,解决相控阵天线散热的问题;所述发射组件阵列控制接口,与所述fpga控制模块连接,用于实现fpga控制模块对发射组件阵列加电控制、移相和衰减控制功能;所述接收组件阵列控制接口,与所述fpga控制模块连接,用于实现fpga控制模块对接收组件阵列加电控制、移相和衰减控制功能。
17.优选的,所述adc采集模块与fpga控制模块之间采用spi接口连接,连接方式为pcb布线连接;所述gnss/ins模块与fpga控制模块之间采用uart接口连接,连接方式为连接器连接。
18.优选的,所述基带通信接口采用rs422通信接口,连接方式为连接器连接;所述信标接收机通信接口采用uart通信接口,连接方式为连接器连接;所述信道通信接口采用spi接口,连接方式为连接器连接;所述风扇控制接口采用ttl电平pwm信号连接,连接方式为连接器连接;所述发射组件阵列控制接口采用spi通信接口,连接方式为连接器连接;所述接收组件阵列控制接口采用spi通信接口,连接方式为连接器连接。
19.优选的,还包括时钟模块a、时钟模块b、存储器模块a和存储器模块b,所述时钟模块a,与所述fpga控制模块连接,用于产生fpga控制模块的工作时钟;所述时钟模块b,与所述dsp控制模块连接,用于产生dsp控制模块的工作时钟;所述存储器模块a,与所述fpga控制模块连接,用于存储fpga配置程序和fpga控制模块波束解算产生的波控码和相控阵天线阵面幅相数据;所述存储器模块b,与所述dsp控制模块连接,用于缓存dsp控制模块波束指向角解算产生的方位角和俯仰角数据。
20.优选的,所述时钟模块a和所述存储器模块a与所述fpga控制模块之间均采用并行总线连接;所述时钟模块b和所述存储器模块b与所述dsp控制模块之间均采用并行总线连接,连接方式均为pcb布线连接。
21.优选的,所述fpga控制模块采用emif接口、spi接口或uart接口与所述dsp控制模块连接,连接方式为pcb布线连接。
22.本发明具有如下的优点和有益效果:
23.1、本发明一种动中通相控阵天线波束控制系统,采用fpga+dsp的控制系统架构,可以最大限度提高相控阵天线波束控制系统波束控制实时性、稳定性、快速性、准确性和可靠性;
24.2、本发明一种动中通相控阵天线波束控制系统,集成adc采集模块,adc采集模块对相关模块进行检测,实现对相控阵天线的电源开关机控制、低功耗管理、电压电流遥测功
能,提高产品的可靠性和稳定性;
25.3、本发明一种动中通相控阵天线波束控制系统,集成两级电源转换模块,可以实现波控系统供电与外部供电的电气隔离,确保了波控系统供电的稳定性。同时降低了因发射组件阵列和接收组件阵列低电压、大电流工作产生的传输线路压降,提高了发射组件阵列和接收组件阵列的可靠性。
附图说明
26.此处所说明的附图用来提供对本发明实施例的进一步理解,构成本申请的一部分,并不构成对本发明实施例的限定。在附图中:
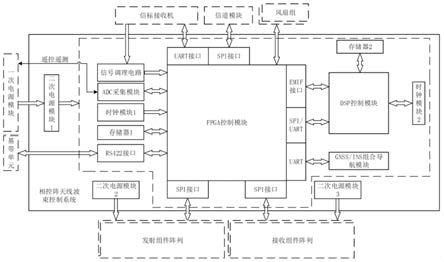
27.图1为本发明的系统结构图。
具体实施方式
28.为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
29.实施例
30.传统的动中通抛物面天线和平板天线,控制系统均为伺服控制,伺服控制受电子罗盘、陀螺仪等器件的影响,扫描精度和反应灵敏度有限,很难维持灵活机动地进行波束切换达成高速运动天线载体的实时跟踪。本实施例提出一种动中通相控阵天线波束控制系统,不需要伺服控制,而是采用fpga+dsp的控制系统架构进行波束指向角解算和波束解算,计算出接收组件阵列和发射组件阵列各单元的目标波束指向的移相控制码和幅度控制码,并发送给接收组件阵列和发射组件阵列,实现接收波束和发射波束方向图的合成,不同的移相控制码和幅度控制码能够改变天线方向图最大值的指向,通过控制发射波束和接收波束的指向可以完成卫星通信信号的发送和接收。fpga+dsp的组合控制系统,可以最大限度提高相控阵天线波束控制系统波束控制实时性、稳定性、快速性、准确性和可靠性,达到快速波束扫描的目的,在动中通卫星通信中更易实现高速运动天线载体的实时跟踪。
31.如图1所示,一种动中通相控阵天线波束控制系统,包括fpga控制模块、dsp控制模块、时钟模块a、时钟模块b、gnss/ins模块、一次电源模块、二次电源模块a、二次电源模块b、二次电源模块c、信号调理模块、adc采集模块、存储器模块a、存储器模块b和接口模块;
32.fpga控制模块用于接收相控阵天线载体的地球位置信息(经纬度)、相控阵天线载体的姿态信息(偏航角、俯仰角、横滚角)和来自基带单元的星历数据,并将星历数据、地球位置信息和姿态信息发送给dsp控制模块;
33.dsp控制模块根据星历数据、地球位置信息和姿态信息,进行波束指向角度解算,得到波束指向方位角信息和波束指向俯仰角信息,并将波束指向方位角信息和波束指向俯仰角信息,发送给fpga控制模块;
34.fpga控制模块用于根据来自基带单元的波束控制指令,对波束指向方位角信息和波束指向俯仰角信息进行波束解算,得到接收组件阵列中各天线单元目标波束指向的移相控制码和幅度控制码,并将接收组件阵列中各天线单元目标波束指向的移相控制码和幅度控制码,发送给接收组件阵列;还得到发射组件阵列各天线单元目标波束指向的移相控制
码和幅度控制码,并将发射组件阵列中各天线单元目标波束指向的移相控制码和幅度控制码,发送给发射组件阵列。
35.fpga控制模块用于接收agc电压值和来自信标接收机的锁定指示信号,得到波束指向角的精准度,并对波束指向角进行修正;fpga控制模块用于接收来自基带单元的发射频率信息和接收频率信息,并将发射频率信息和接收频率信息发送给信道模块。
36.一次电源模块与二次电源模块a、二次电源模块b和二次电源模块c均采用连接器连接;一次电源模块将外部一次电源24v隔离转换为12v提供给二次电源模块a、二次电源模块b和二次电源模块c;二次电源模块a与波束控制系统各模块通过pcb布线连接;二次电源模块a接收一次电源模块供电12v,并转换成1v、1.2v、1.8v、3.3v和5v,给波束控制系统各模块供电;二次电源模块b与相控阵天线发射组件阵列采用连接器连接;二次电源模块b接收一次电源模块供电12v,并转换成1.8v,给相控阵天线发射组件阵列供电;二次电源模块c与相控阵天线接收组件阵列采用连接器连接;二次电源模块c接收一次电源模块供电12v,并转换成1.8v,给相控阵天线接收组件阵列供电。
37.集成两级电源转换模块,一次电源模块将外部一次电源24v隔离转换为12v提供给相控阵波束控制系统,经二次电源模块a将12v转换为波束控制电路所需的1v、1.2v、1.8v、3.3v和5v供电,可以实现波控系统供电与外部供电的电气隔离,确保了波控系统供电的稳定性。同时经二次电源模块b、二次电源模块c分别将12v转换为发射组件阵列和接收组件阵列所需的1.8v电压,通过排针连接器直接给发射组件阵列和接收组件阵列供电,降低了因发射组件阵列和接收组件阵列低电压、大电流工作产生的传输线路压降,提高了发射组件阵列和接收组件阵列的可靠性。
38.gnss/ins组合导航模块、信号调理模块和adc采集模块分别与fpga控制模块连接,gnss/ins组合导航模块用于检测相控阵天线载体的地球位置信息和姿态信息,并将地球位置信息和姿态信息发送给fpga控制模块;信号调理模块用于对信标接收机输出的agc电压进行滤波和隔离,并经adc转换后发送给fpga控制模块;adc采集模块用于检测一次电源模块的供电电压和电流,将一次电源模块输出的电压电流模拟信号转换为数字信号传输给fpga控制模块;接口模块包括:基带通信接口、信标接收机通信接口、信道通信接口、风扇控制接口、发射组件阵列控制接口和接收组件阵列控制接口;基带通信接口与fpga控制模块连接,用于实现fpga控制模块与基带单元之间的通信;信标接收机通信接口与fpga控制模块连接,用于实现fpga控制模块与信标接收机之间的通信;信道通信接口与fpga控制模块连接,用于实现fpga控制模块与信道之间的通信;风扇控制接口与fpga控制模块连接,用于实现fpga控制模块对相控阵天线散热风扇组的开关控制和调速控制功能,解决相控阵天线散热的问题;发射组件阵列控制接口与fpga控制模块连接,用于实现fpga控制模块对发射组件阵列加电控制、移相和衰减控制功能;接收组件阵列控制接口与fpga控制模块连接,用于实现fpga控制模块对接收组件阵列加电控制、移相和衰减控制功能。
39.adc采集模块与fpga控制模块之间采用spi接口连接,连接方式为pcb布线连接;gnss/ins模块与fpga控制模块之间采用uart接口连接,连接方式为连接器连接。
40.基带通信接口采用rs422通信接口,连接方式为连接器连接;信标接收机通信接口采用uart通信接口,连接方式为连接器连接;信道通信接口采用spi接口,连接方式为连接器连接;风扇控制接口采用ttl电平pwm信号连接,连接方式为连接器连接;发射组件阵列控
制接口采用spi通信接口,连接方式为连接器连接;接收组件阵列控制接口采用spi通信接口,连接方式为连接器连接。
41.时钟模块a、时钟模块b、存储器模块a和存储器模块b,时钟模块a与fpga控制模块连接,用于产生fpga控制模块的工作时钟;时钟模块b与dsp控制模块连接,用于产生dsp控制模块的工作时钟;存储器模块a与fpga控制模块连接,用于存储fpga配置程序和fpga控制模块波束解算产生的波控码和相控阵天线阵面幅相数据;存储器模块b与dsp控制模块连接,用于缓存dsp控制模块波束指向角解算产生的方位角和俯仰角数据。
42.时钟模块a和存储器模块a与fpga控制模块之间均采用并行总线连接;时钟模块b和存储器模块b与dsp控制模块之间均采用并行总线连接,连接方式均为pcb布线连接。
43.fpga控制模块采用emif接口、spi接口或uart接口与dsp控制模块连接,连接方式为pcb布线连接。
44.实现波束解算:
45.控制系统fpga控制模块通过基带通信接口模块接收基带单元下发的星历数据,并接收gnss/ins组合导航模块提供的相控阵天线载体的地球位置信息和相控阵天线载体的姿态信息,fpga控制模块将接收到星历数据、相控阵天线载体的地球位置信息和相控阵天线载体的姿态信息转发给dsp控制模块,由dsp控制模块进行波束指向角度解算,将波束指向角度解算得到的波束指向方位角和俯仰角信息回传给fpga控制模块;fpga控制模块接收基带单元下发的波束控制指令和接收dsp控制模块回传的波束指向方位角和俯仰角信息,经过波束解算,计算出接收组件阵列和发射组件阵列各天线单元的目标波束指向的移相控制码和幅度控制码,通过spi接口分发到各接收组件阵列和发射组件阵列,实现接收和发射波束方向图的合成,不同的移相控制码和幅度控制码可以改变天线方向图最大值的指向,通过控制发射波束和接收波束的指向可以完成卫星通信信号的发送和接收。
46.实现自动搜星、跟踪和丢星重捕获控制:
47.信标接收机用于接收目标通信卫星的信标信号和载波信号,通过解调后得到agc电压值和锁定指示信号,信标接收机将锁定指示信号提供给fpga控制模块,信标接收机将agc电压值发送给信号调理模块,信号调理模块对信标接收机输出的agc电压进行滤波和隔离,并经adc转换后发送给fpga控制模块;fpga控制模块基于接收的agc电压值和锁定指示信号,可以判定波束指向控制的精准度并实施波束指向角度的修正,实现相控阵天线自动搜星、跟踪和丢星重捕获控制。
48.信道模块用于实现目标卫星上行射频信号和下行射频信号的变频功能,将上下行射频信号转换成中频信号,便于通讯信号处理和采集,fpga控制模块接收到基带单元下发的发射和接收频率信息后,通过spi接口转发给信道模块,由信道模块完成上行射频信号和下行射频信号的变频处理。
49.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1