智能机器人底座的制作方法
1.本技术涉及智能机器人领域,特别涉及一种智能机器人底座。
背景技术:
2.智能机器人是近年来高速发展的一种新兴科技,且随着技术的不断进步,机器人技术也愈发成熟。智能机器人是集环境感知、动态决策与规划、行动控制与执行等多功能于一体的综合系统,它集成了传感器技术、信息处理、电子工程、计算机工程、自动化控制工程以及人工智能等多学科技术。智能机器人底座是指用于支撑整个机器人主体并实现移动的部件,但是,发明人在本技术的研究过程中发现,现有的智能机器人底座制造成本较高,且底座的通过性较差,给智能机器人的整体使用造成了较大的影响。
技术实现要素:
3.本技术提供一种智能机器人底座,以解决背景技术中提出的问题。
4.一种智能机器人底座,包括底盘、两个麦克纳姆轮、两个驱动轮组件、电源和控制器,所述两个麦克纳姆轮、两个驱动轮组件均匀安装于底盘周向外侧,所述驱动轮组件包括驱动轮和驱动电机,所述驱动轮以智能机器人底座前后移动方向设置,所述驱动电机与控制器连接,所述控制器与电源连接。本技术提供的智能机器人底座以驱动轮作为主动轮,以麦克纳姆轮作为从动轮,一方面利用麦克纳姆轮自身高灵活性、高平稳性的特点,提高了底座整体的稳定性和通过性,另一方面最大限度的减少了麦克纳姆轮的使用数量,进而降低底座的制造成本。
5.优选地,所述两个麦克纳姆轮以智能机器人底座前后移动方向设置。前后方向设置的麦克纳姆轮相比于左右方向横向设置的麦克纳姆轮具有更大的滚动面积,使得底座在移动时具有更大的抓地力,进而大大提高整个底座的移动稳定性和通过性。
6.优选地,所述底盘周向外侧开设有多个用于安装麦克纳姆轮和驱动轮组件的安装缺口。安装缺口为麦克纳姆轮和驱动轮组件的安装提供避让部,使得底座更加美观。
7.优选地,所述麦克纳姆轮对应的安装缺口处设有支架和减震组件,所述支架固定安装于底盘,所述减震组件的一端连接于支架,另一端连接于麦克纳姆轮。减震组件能够大大提高麦克纳姆轮的减震能力,使得底座在经过障碍物或颠簸路面时仍保持较好的平稳性和通过性。
8.优选地,所述减震组件包括两个弹簧和两个液压杆,所述两个液压杆分别设置于麦克纳姆轮两侧,所述两个弹簧分别套设于两个液压杆外侧,所述两个液压杆的一端连接于支架,另一端连接于麦克纳姆轮轴心两侧。
9.优选地,所述麦克纳姆轮为采用大小轮交替分布的单排麦克纳姆轮,所述大小轮均采用橡胶轮面。橡胶轮面的设计同样进一步加强了麦克纳姆轮的减震能力。
10.优选地,所述底盘开设有多个用于安装电源、控制器和驱动电机的安装孔。
11.优选地,所述底盘开设有多个用于电源、控制器和驱动电机走线的线孔。
12.优选地,所述驱动电机为涡轮蜗杆无刷减速电机。
13.优选地,所述底盘上安装有固定架,所述固定架与底盘焊接固定。固定架的设计加强了底盘的结构强度,使其在上部安装机器人主体后仍保持较好的稳固性。
附图说明
14.图1为本技术提供的智能机器人底座的俯视图;
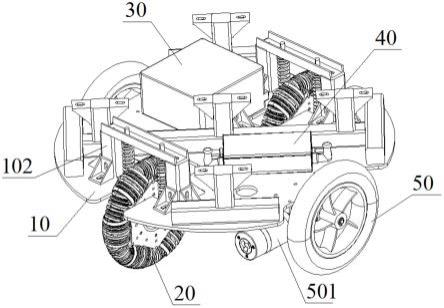
15.图2为本技术提供的智能机器人底座的立体图;
16.图3为本技术提供的智能机器人底座的仰视图;
17.图4为本技术提供的智能机器人底座中,底盘的示意图;
18.图5为本技术提供的智能机器人底座中,麦克纳姆轮和减震组件的正视图;
19.图6为本技术提供的智能机器人底座中,麦克纳姆轮和减震组件的立体图。
20.其中:10-底盘,101-安装缺口,102-支架,103-弹簧,104-液压杆,105-转动轴承,106-转轴,107-固定架,108-安装孔,109-线孔,20-麦克纳姆轮,30-电源,40-控制器,50-驱动轮,501-驱动电机。
具体实施方式
21.下面结合附图对本发明的具体实施方式作详细的说明,而非对本发明的保护范围限制。术语“前”、“后”、“左”、“右”、“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。术语“第一”、“第二”仅用于简化文字描述以区别于类似的对象,而不能理解为特定的次序间的先后关系。
22.参阅图1至图4,本技术提供一种智能机器人底座,包括底盘10、两个麦克纳姆轮20、两个驱动轮组件、电源30和控制器40,两个麦克纳姆轮20、两个驱动轮组件均匀安装于底盘10周向外侧,两个麦克纳姆轮20和两个驱动轮组件的安装位置本技术不作具体限定,例如两个麦克纳姆轮20对称安装于底盘10前部两侧,两个驱动轮组件对称安装于底盘10后部两侧;或两个麦克纳姆轮20和两个驱动轮组件呈“十”字型交叉分布等等,本技术实施例以两个驱动轮组件设置于底盘10左右两侧、两个麦克纳姆轮20设置于底盘10前后两侧为例,驱动轮组件包括驱动轮50和驱动电机501,驱动电机501与驱动轮50连接,用于为驱动轮50提供动力。优选地,底盘10周向外侧开设有多个用于安装麦克纳姆轮20和驱动轮50的安装缺口101,安装缺口101的形状和大小分别与麦克纳姆轮20和驱动轮50相适配,安装缺口101为麦克纳姆轮20和驱动轮50的安装提供了避让部。
23.参阅图1,驱动轮50以智能机器人底座前后移动方向设置,驱动电机501与控制器40连接,控制器40与电源30连接。优选地,驱动电机采用涡轮蜗杆无刷减速电机,涡轮蜗杆无刷减速电机具有结构紧凑、体积轻巧、传动速比大、扭矩大和具备自锁功能等特点,除了驱动驱动轮50前后运动外,还可在控制器40的控制下实现左右转向,具有较高的适用性。
24.参阅图1,优选地,两个麦克纳姆轮20以智能机器人底座前后移动方向设置,前后方向设置的麦克纳姆轮20相比于左右方向横向设置的麦克纳姆轮具有更大的滚动面积,使得底座在移动时具有更大的抓地力,进而大大提高整个底座的移动稳定性和通过性。
25.参阅图5和图6,优选地,麦克纳姆轮20对应的安装缺口101处设有支架102和减震组件,支架102固定安装于底盘10,减震组件的一端连接于支架102,另一端连接于麦克纳姆轮20。具体地,减震组件包括两个弹簧103和两个液压杆104,两个液压杆104分别设置于麦克纳姆轮20两侧,两个弹簧103分别套设于两个液压杆104外侧,麦克纳姆轮20的中心位置设有转动轴承105和转轴106,转动轴承105安装于麦克纳姆轮20中心位置内部,转轴106横向贯穿转动轴承105两端,两个液压杆104的一端连接于支架102,另一端分别连接于转轴106的两端。
26.参阅图4、图5和图6,优选地,麦克纳姆轮20为采用大小轮交替分布的单排麦克纳姆轮(前述的单排麦克纳姆轮为公知的现有技术,本技术不再做过多的结构描述),大小轮均采用橡胶轮面,橡胶轮面的设计同样进一步加强了麦克纳姆轮的减震能力。底盘开设有多个用于安装电源、控制器和驱动电机的安装孔108,以及多个用于电源、控制器和驱动电机走线的线孔109。底盘上表面/下表面安装有固定架107,固定架107与底盘10焊接固定,固定架107的设计加强了底盘10的结构强度,使其在上部安装机器人主体后仍保持较好的稳固性。
27.最后应说明的是:以上实施例仅用以说明本发明而并非限制本发明所描述的技术方案;因此,尽管本说明书参照上述的实施例对本发明已进行了详细的说明,但是,本领域的普通技术人员应当理解,仍然可以对本发明进行修改或等同替换;而一切不脱离本发明的精神和范围的技术方案及其改进,其均应涵盖在本发明的权利要求范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1