一种组装式C型机器人焊钳静臂的电极杆安装结构的制作方法
一种组装式c型机器人焊钳静臂的电极杆安装结构
技术领域
1.本实用新型涉及机器人焊接技术领域,尤其是涉及一种组装式c型机器人焊钳静臂的电极杆安装结构。
背景技术:
2.随着汽车工业的飞速发展,汽车制造设备也随之日益更新,机器人焊钳作为一种先进的自动化设备,动作稳定可靠,重复精度高,在汽车白车身生产中得到越来越广泛的应用。c型焊钳作为一种常见的焊钳,有着广泛的应用前景。
3.机器人焊钳在焊接的过程中会带来持续发热,如不冷却,会带来安全隐患,影响部分检测元件灵敏性等一系列危害。而冷却系统通常采用冷却管道对电极帽进行冷却散热,在靠近电极帽一侧的冷却管道安装结构复杂,对于嵌入在电极臂内的冷却管道而言,一旦冷却管道堵塞则需要进行拆卸疏通,拆装较麻烦。因此需要一种组装式c型机器人焊钳静臂的电极杆安装结构,以解决上述技术问题。
技术实现要素:
4.本实用新型针对现有技术中存在的技术问题,提供一种组装式c型机器人焊钳静臂的电极杆安装结构。
5.本实用新型解决上述技术问题的技术方案如下:一种组装式c型机器人焊钳静臂的电极杆安装结构,包括电极臂,所述电极臂的末端两侧面上均固定有侧板,两块侧板之间设置有转接块、两根转接管、静电极小臂,所述转接块的前侧面贯穿设置有两个通孔,所述转接块的前侧面还设置有两个转接管接口,所述转接块的后侧面设置有两个第三防堵孔以及两个冷却管接口,所述转接块的左右两侧均设置有凸台,每个所述凸台的端面上均设置有一个第二防堵孔,所述转接块的上下两端面上均设置有一个第一防堵孔,所述冷却管接口与所述转接管接口相通,所述转接管的一端与所述转接管接口连接,所述转接管的另一端与所述静电极小臂连接,所述静电极小臂的右端安装有电极杆,所述电机杆上安装有电极帽。
6.优选地,上述的组装式c型机器人焊钳静臂的电极杆安装结构,其中所述侧板上设置有矩形卡槽,所述凸台嵌入在所述矩形卡槽的内部。
7.优选地,上述的组装式c型机器人焊钳静臂的电极杆安装结构,其中所述电极臂的末端端面上设置有第一螺纹孔,所述通孔的内部穿入有第一螺栓,所述第一螺栓的端部嵌入在所述第一螺纹孔的内部。
8.优选地,上述的组装式c型机器人焊钳静臂的电极杆安装结构,其中所述电极臂的末端两侧均设置有凹台,所述凹台上设置有多个第二螺纹孔,所述侧板的内部穿入有第二螺栓,所述第二螺栓的端部嵌入在所述第二螺纹孔的内部。
9.优选地,上述的组装式c型机器人焊钳静臂的电极杆安装结构,其中所述静电极小臂的两侧均设置有多个第三螺纹孔,所述侧板的内部穿入有第三螺栓,所述第三螺栓的端
部嵌入在所述第三螺纹孔的内部。
10.优选地,上述的组装式c型机器人焊钳静臂的电极杆安装结构,其中两块所述侧板之间固定有支撑板。
11.优选地,上述的组装式c型机器人焊钳静臂的电极杆安装结构,其中所述电极臂的两侧面上均设置有凹槽。
12.本实用新型的有益效果是:在使用该组装式c型机器人焊钳静臂的电极杆安装结构时,若转接块或转接管出现堵塞时,可直接将两侧板拆下,此外各连接部件之间通过螺栓连接便于拆卸安装,便于对转接管以及转接块进行疏通。此外,转接块上设置有第一防堵孔、第二防堵孔、第三防堵孔,便于转接块内部快速疏通。该组装式c型机器人焊钳静臂的电极杆安装结构在冷却管道堵塞时便于对冷却管道进行拆卸疏通。
附图说明
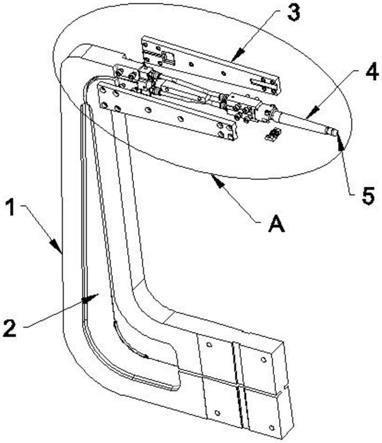
13.图1为本实用新型的整体结构示意图;
14.图2为图1中a处的局部放大图;
15.图3为转接块的结构示意图。
16.附图中,各标号所代表的部件列表如下:
17.1、电极臂,2、凹槽,3、侧板,4、电极杆,5、电极帽,6、凹台,7、转接块,71、凸台,72、转接管接口,73、第一防堵孔,74、第二防堵孔,75、通孔,76、第三防堵孔,77、冷却管接口,8、静电极小臂,9、压块,10、矩形卡槽,11、支撑板,12、转接管。
具体实施方式
18.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
19.如图1、图2所示,一种组装式c型机器人焊钳静臂的电极杆安装结构,包括电极臂1,电极臂1的两侧面上均设置有凹槽2,便于减轻自重,节省材料。电极臂1的末端两侧面上均固定有侧板3,具体地,电极臂1的末端两侧均设置有凹台6,凹台6上设置有多个第二螺纹孔,侧板3的内部穿入有第二螺栓,第二螺栓的端部嵌入在第二螺纹孔的内部,通过第二螺栓连接固定,便于安装拆卸。凹台6的深度与侧板3厚度一致,便于保持电极臂1与侧板3外侧面平齐。两块侧板3之间通过螺栓固定有支撑板11,便于加强结构强度。
20.如图1、图2、图3所示,两块侧板3之间还设置有转接块7、两根转接管12、静电极小臂8。静电极小臂8的两侧均设置有多个第三螺纹孔,侧板3的内部穿入有第三螺栓,第三螺栓的端部嵌入在第三螺纹孔的内部,通过第二螺栓连接固定,从而便于拆卸和安装。转接块7的前侧面贯穿设置有两个通孔75,电极臂1的末端端面上设置有第一螺纹孔,通孔75的内部穿入有第一螺栓,第一螺栓的端部嵌入在第一螺纹孔的内部。转接块7的前侧面还设置有两个转接管接口72,转接管12的一端与转接管接口72连接,转接管12的另一端与静电极小臂8连接。静电极小臂8的右端安装有电极杆4,具体地,通过压块9与螺栓将电极杆4锁紧在静电极小臂8上,电机杆4上安装有电极帽5。
21.转接块7的后侧面设置有两个第三防堵孔76以及两个冷却管接口77,冷却管接口77与转接管接口72相通。冷却管接口77用于连接从电极臂1一端引入的冷却管。转接块7的
左右两侧均设置有凸台71,侧板3上设置有矩形卡槽10,凸台71嵌入在矩形卡槽10的内部,便于安装定位。每个凸台71的端面上均设置有一个第二防堵孔74,转接块7的上下两端面上均设置有一个第一防堵孔73。第一防堵孔73、第二防堵孔74、第三防堵孔76的孔口位置均安装有堵头,在内部管路堵塞时可取下堵头进行疏通。冷却管接口77与转接管接口72之间形成两条冷却通道,每条冷却通道均包括一个冷却管接口77、一个转接管接口72、一个第一防堵孔73、一个第二防堵孔74、一个第三防堵孔76。如图3所示,冷却管接口77与第二防堵孔74相通,第二防堵孔74与第三防堵孔76相通,第三防堵孔76与第一防堵孔73相通,第一防堵孔73与转接管接口72相通,因此冷却管接口77与转接管接口72相通。
22.在使用该组装式c型机器人焊钳静臂的电极杆安装结构时,若转接块7或转接管12出现堵塞时,可直接将两侧板3拆下,此外各连接部件之间通过螺栓连接便于拆卸安装,便于对转接管12以及转接块7进行疏通。此外,转接块7上设置有第一防堵孔73、第二防堵孔74、第三防堵孔76,便于转接块7内部快速疏通。整个安装结构拆装灵活,便于运输。
23.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“左”、“右”等指示方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以及特定的方位构造和操作,因此,不能理解为对本实用新型的限制。此外,“第一”、“第二”仅由于描述目的,且不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。因此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者多个该特征。本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
24.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”“相连”“连接”等应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接连接,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
25.以上对本实用新型的一个实施例进行了详细说明,但所述内容仅为本实用新型的较佳实施例,不能被认为用于限定本实用新型的实施范围。凡依本实用新型申请范围所作的均等变化与改进等,均应仍归属于本实用新型的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1