一种用于车间检测的巡检系统及其巡检方法与流程
1.本发明涉及一种巡检机器人,具体是一种用于车间检测的巡检系统,涉及机器人巡检的技术领域。
背景技术:
2.随着我国企业的飞速发展,进而为了保证企业在生产过程中的安全,进而大多数的企业都是采用人工进行对车间的巡检工作,但是在一些高温、高湿以及有毒的环境中,长时间的人工巡检会导致人员身体的损伤,进而巡检机器人得到了飞速的发展,现有的数据中心巡检机器人,基于高精度2dlidar(激光雷达)做导航控制,再将由2dlidar(激光雷达)反馈回来的信息输入至ros(机器人操作系统)中,进而对机器人的行走路径进行建图、规划和修正工作。
3.但是现有的巡检机器人在实际工作过程中还存在一些问题,根据现有的巡检机器人在it机房通风槽上面的行走会引发一些问题,在巡检机器人在进行巡检的过程中,巡检机器人会出现原地转弯,进而导致巡检机器人出现卡住现象,进而导致巡检工作的失败,同时出现原地转弯的巡检机器人在行走时会出现晃动,进而有可能与被巡检设备之间发生碰撞,进而不仅没能够完成巡检工作,而且还会造成被巡检设备的损坏,进而增加企业的生产成本。
4.因此,如何避免巡检机器人失控时与被巡检设备发生碰撞,是目前要解决的一个问题。
技术实现要素:
5.发明目的:提供一种用于车间检测的巡检系统,以解决现有技术存在的上述问题。
6.技术方案:一种用于车间检测的巡检系统,包括:
7.下底座,设置在所述下底座上的一组转动轴,设置在所述转动轴上的驱动组件,与所述下底座连接的控制室,以及对称安装在所述下底座上的一组保护组件;所述保护组件包括与所述下底座固定连接的旋转装置,与所述旋转装置连接的传动蜗杆,以及与所述旋转装置连接的自锁装置。
8.在进一步的实施例中,所述驱动组件包括对称设置在其中一个转动轴上的一组主动链轮,对称安装在所述转动轴两端的一组主动轮,对称安装在另一个转动轴上的一组从动链轮,对称安装在另一个转动轴上的一组从动轮,以及用于连接所述主动链轮和从动链轮的链条,巡检机器人上的巡检装置能够完成对不同区域的巡检工作,进而完成对指定区域的巡检工作,保证了巡检机器人的正常工作过程。
9.在进一步的实施例中,所述旋转装置包括与所述下底座固定连接的支柱,设置在所述支柱上的连接杆,设置在所述连接杆上的连接板,与所述连接板固定连接的驱动件,以及设置在所述驱动件上的转动杆,能够实现对驱动电机位置的调整,进而使其能够位于既定的区域,保证巡检工作的顺利进行。
10.在进一步的实施例中,所述旋转装置还包括与所述转动杆连接的驱动电机,设置在所述驱动电机输出端的连接销,与所述连接销连接的连杆,设置在所述连杆另一端的连接座,以及与所述连接座连接的连接部,所述连接部套接在连接杆上、且所述连接部与传动蜗杆连接,所述连杆为弧形结构,避免巡检装置失控时与被巡检设备之间发生碰撞,避免了巡检装置与被巡检设备的损坏。
11.在进一步的实施例中,所述自锁装置包括与所述传动蜗杆啮合的齿轮,设置在所述齿轮上的第一凸轮,位于所述第一凸轮上的限位件,以及与所述限位件连接的限位板;所述第一凸轮上设有弧形的通孔,所述限位件上设有一个凸起端,所述凸起端穿过该通孔、且能够在该通孔中运动,所述齿轮为凸轮结构,所述限位件的另一端具有既定的弧度,能够带动巡检机器人开始工作,完成对巡检机器人的维修工作。
12.在进一步的实施例中,所述自锁装置还包括对称设置在所述转动轴两侧、且位于所述下底座上的一组连接件,所述连接件与转动轴之间还设有轴承,所述轴承的内圈与转动轴连接,所述轴承的外圈设置在连接件上,能够减少转动轴转动时对连接座径向上的压力,进而能够避免连接座的损坏,进而保证装置的顺利运行,能够避免连接座的损坏,进而保证装置的顺利运行。
13.在进一步的实施例中,所述下底座上还设有与所述控制室电性连接的巡检装置,以及设置在所述下底座上的下平行板,所述第一凸轮上设有凸起部,所述凸起部位于下平行板上、且与所述下平行板转动连接,当完成对巡检机器人的维修工作后,此时转动中能够正常转动,此时巡检机器人能够完成对指定局域的巡检工作。
14.一种基于上述车间检测的巡检系统的巡检方法,包括如下步骤:
15.s1:当需要完成对既定区域的巡检工作时,此时首先在ros(机器人操作系统)中实现基于2d lidar(激光雷达)的建图、定位、路径规划功能,进而通过多传感器的感知融合功能和定位功能,进而实现巡检运动的精度控制,然后将前后深度视觉探测和特征分析数据集成到多传感器感知融合功能中,进而通过前后深度视觉探测和特征分析实现避障和防撞功能,然后在指定区域中完成对避障和防撞功能的测试和修正,然后通过设置的巡检装置,能够完成对既定区域的巡检工作;
16.s2:当完成对输入到控制室中的数据进行测试和修正后,此时控制室能够带动其中一个转动轴开始运动,此时转动的转动轴能够带动主动轮开始工作,同时转动的转动轴能够带动其两端的主动链轮开始工作,进而运动的主动链轮能够带动链条开始工作,然后运动的链条能够带动从动链轮开始工作,此时转动的从动链轮能够带动另一个转动轴开始工作,进而转动的转动轴能够带动从动轮开始工作,此时通过主动轮和从动轮的运动,进而能够带动巡检机器人开始工作,此时巡检机器人上的巡检装置能够完成对不同区域的巡检工作,进而完成对指定区域的巡检工作;
17.s3:当巡检机器人开始进行巡检工作时,此时控制室能够带动驱动件开始运动,然后当巡检机器人在进行巡检工作过程中失控时,此时驱动件开始工作,进而运动的驱动件能够带动转动杆开始工作,进而运动的转动杆能够带动驱动电机开始工作,此时运动的驱动电机开始工作,进而运动的驱动电机能够带动连接销开始工作,进而运动的连接销能够带动连接部开始工作,进而运动的连接部能够带动连接座开始工作,然后运动的连接座能够带动连接部开始工作,进而能够带动转动部开始转动;
18.s4:当转动部开始转动后,此时转动的转动部能够带动传动蜗杆开始工作,进而转动的传动蜗杆能够带动齿轮开始工作,进而运动的齿轮能够带动第一凸轮开始工作,进而运动的第一凸轮能够带动限位件开始工作,进而运动的限位件能够与转动轴接触,随着第一凸轮的继续工作,进而限位板上的凸起端能够在第一凸轮上的通孔中开始运动,进而能够使限位板开始上升,直至与限位件相接触,进而通过限位件和限位板的配合使用,完成对转动轴的限位工作,进而能够使转动轴停止运动,从而能够使主动轮停止运动,进而完成对转动轴的锁紧工作;
19.s5:当危险状态解除时,此时驱动电机开始反向工作,进而能够带动传动蜗杆反向转动,进而运动的传动涡轮能够带动齿轮开始工作,进而运动的齿轮能够带动第一凸轮开始工作,进而能够完成对限位板的驱动工作,此时能够使限位板与转动轴分离,同时又由于下平行板是设置在下底座上,进而随着第一凸轮的继续转动,进而限位件开始运动,进而脱离转动轴,进而完成限位件和限位板与转动轴的脱离,此时转动轴能够开始工作,进而能够带动巡检机器人开始工作,完成对巡检机器人的维修工作。
20.有益效果:本发明公开了一种用于车间检测的巡检系统,为了避免巡检机器人原地转弯进而导致其与被巡检装置之间发生碰撞,进而设有保护组件,当巡检机器人失控时,此时控制室能够使驱动电机开始工作,从而运动的驱动电机能够使转动部开始工作,进而当转动部开始转动后,此时转动的转动部能够带动传动蜗杆开始工作,进而转动的传动蜗杆能够带动齿轮开始工作,进而运动的齿轮能够带动第一凸轮开始工作,进而运动的第一凸轮能够带动限位件开始工作,进而运动的限位件能够与转动轴接触,随着第一凸轮的继续工作,进而限位板上的凸起端能够在第一凸轮上的通孔中开始运动,进而能够使限位板开始上升,直至与限位件相接触,进而通过限位件和限位板的配合使用,完成对转动轴的限位工作,进而能够使转动轴停止运动,从而能够使主动轮停止运动,进而完成对转动轴的锁紧工作,当危险状态解除时,此时驱动电机开始反向工作,进而能够带动传动蜗杆反向转动,进而运动的传动涡轮能够带动齿轮开始工作,进而运动的齿轮能够带动第一凸轮开始工作,进而能够完成对限位板的驱动工作,此时能够使限位板与转动轴分离,同时又由于下平行板是设置在下底座上,进而随着第一凸轮的继续转动,进而限位件开始运动,进而脱离转动轴,进而完成限位件和限位板与转动轴的脱离,此时转动轴能够开始工作,进而能够带动巡检机器人开始工作,完成对巡检机器人的维修工作。通过设置的保护组件,进而在巡检机器人失控时能够完成对主动轮的锁紧工作,进而避免其失控时与被巡检装置发生碰撞,同时还能够避免与被巡检装置产生卡住现象,进而保证巡检装置和被巡检设备的安全,同时通过设置的下平行板,进而能够使限位和限位板从转动轴上分离,进而在维修技术后,能够保证巡检装置的继续运行。
附图说明
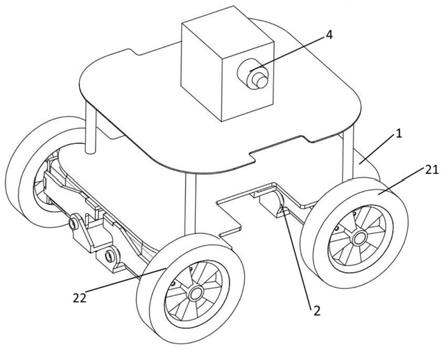
21.图1是本发明的立体图。
22.图2是本发明的俯视图。
23.图3是本发明的链条示意图。
24.图4是本发明的旋转装置结构示意图。
25.图5是本发明的自锁装置结构示意图。
26.图6是本发明的车轮转向受力分析图。
27.附图标记为:下底座1、驱动组件2、主动轮21、从动轮22、转动轴23、链条24、主动链轮25、从动链轮26、保护组件3、支柱31、连接杆32、旋转装置33、驱动件331、连接板332、转动杆333、驱动电机334、连杆335、连接座336、连接部337、连接销338、自锁装置34、传动蜗杆341、齿轮342、下平行板343、第一凸轮344、连接件345、限位板346、限位件347、巡检装置4、控制室5。
具体实施方式
28.经过申请人的研究分析,出现这一问题(巡检机器人会出现原地转弯,进而导致巡检机器人出现卡住现象,进而导致巡检工作的失败)的原因在于,根据现有的巡检机器人在it机房通风槽上面的行走,进而在巡检机器人在进行巡检的过程中会出现原地转弯,同时出现原地转弯的巡检机器人在行走时会出现晃动,进而有可能与被巡检设备之间发生碰撞,进而不仅没能够完成巡检工作,而且还会造成被巡检设备的损坏,进而增加企业的生产成本,本发明为了避免巡检机器人原地转弯进而导致其与被巡检装置之间发生碰撞,进而设有保护组件,当巡检机器人失控时,此时控制室能够使驱动电机开始工作,从而运动的驱动电机能够使转动部开始工作,进而当转动部开始转动后,此时转动的转动部能够带动传动蜗杆开始工作,进而转动的传动蜗杆能够带动齿轮开始工作,进而运动的齿轮能够带动第一凸轮开始工作,进而运动的第一凸轮能够带动限位件开始工作,进而运动的限位件能够与转动轴接触,随着第一凸轮的继续工作,进而限位板上的凸起端能够在第一凸轮上的通孔中开始运动,进而能够使限位板开始上升,直至与限位件相接触,进而通过限位件和限位板的配合使用,完成对转动轴的限位工作,进而能够使转动轴停止运动,从而能够使主动轮停止运动,进而完成对转动轴的锁紧工作,当危险状态解除时,此时驱动电机开始反向工作,进而能够带动传动蜗杆反向转动,进而运动的传动涡轮能够带动齿轮开始工作,进而运动的齿轮能够带动第一凸轮开始工作,进而能够完成对限位板的驱动工作,此时能够使限位板与转动轴分离,同时又由于下平行板是设置在下底座上,进而随着第一凸轮的继续转动,进而限位件开始运动,进而脱离转动轴,进而完成限位件和限位板与转动轴的脱离,此时转动轴能够开始工作,进而能够带动巡检机器人开始工作,完成对巡检机器人的维修工作。通过设置的保护组件,进而在巡检机器人失控时能够完成对主动轮的锁紧工作,进而避免其失控时与被巡检装置发生碰撞,同时还能够避免与被巡检装置产生卡出现象,进而保证巡检装置和被巡检设备的安全,同时通过设置的下平行板,进而能够使限位和限位板从转动轴上分离,进而在维修技术后,能够保证巡检装置的继续运行。
29.一种用于车间检测的巡检系统,包括:下底座1、驱动组件2、主动轮21、从动轮22、转动轴23、链条24、主动链轮25、从动链轮26、保护组件3、支柱31、连接杆32、旋转装置33、驱动件331、连接板332、转动杆333、驱动电机334、连杆335、连接座336、连接部337、连接销338、自锁装置34、传动蜗杆341、齿轮342、下平行板343、第一凸轮344、连接件345、限位板346、限位件347、巡检装置4、控制室5。
30.其中,设置在所述下底座1上的一组转动轴23,设置在所述转动轴23上的驱动组件2,与所述下底座1连接的控制室5,以及对称安装在所述下底座1上的一组保护组件3;所述保护组件3包括与所述下底座1固定连接的旋转装置33,与所述旋转装置33连接的传动蜗杆
341,以及与所述旋转装置33连接的自锁装置34,当需要完成对既定区域的巡检工作时,此时首先在控制室5中的ros(机器人操作系统)中实现基于2dlidar(激光雷达)的建图、定位、路径规划功能,进而通过多传感器的感知融合功能和定位功能,进而实现巡检运动的精度控制,然后将前后深度视觉探测和特征分析数据集成到多传感器感知融合功能中,进而通过前后深度视觉探测和特征分析实现避障和防撞功能,然后在指定区域中完成对避障和防撞功能的测试和修正,然后通过设置的巡检装置4,能够完成对既定区域的巡检工作。
31.所述驱动组件2包括对称设置在其中一个转动轴23上的一组主动链轮25,对称安装在所述转动轴23两端的一组主动轮21,对称安装在另一个转动轴23上的一组从动链轮26,对称安装在另一个转动轴23上的一组从动轮22,以及用于连接所述主动链轮25和从动链轮26的链条24,当完成对输入到控制室5中的数据进行测试和修正后,此时控制室5能够带动其中一个转动轴23开始运动,此时转动的转动轴23能够带动主动轮21开始工作,同时转动的转动轴23能够带动其两端的主动链轮25开始工作,进而运动的主动链轮25能够带动链条24开始工作,然后运动的链条24能够带动从动链轮26开始工作,此时转动的从动链轮26能够带动另一个转动轴23开始工作,进而转动的转动轴23能够带动从动轮22开始工作,此时通过主动轮21和从动轮22的运动,进而能够带动巡检机器人开始工作,此时巡检机器人上的巡检装置4能够完成对不同区域的巡检工作,进而完成对指定区域的巡检工作。在进一步实施例中,传统的传动方法分为链传动、同步带轮和v带传动这三种,其中橡胶同步带能够传动的力矩较小而且橡胶同步带长期受热容易传动皮带老化、皮带开裂变形、被拉长或断裂的情况,进而需要及时进行维护处理或更换皮带,而v带传动这种传动方式传动的外廓尺寸较大、由于v带的弹性滑动,不能保证固定不变的传动比,进而导致其转动轴23上会承受极大的压力,进而导致装置的损坏,因此在该巡检机器人中选用的是链传动方式,而链传动运行的时候没有弹性滑动的现象和打滑的现象,平均传动比较为准确,在工作上比较可靠,传动时效率也比较高。链传动的传递功率比较大,过载的能力较强,在相同的工况下传动的尺寸比较小,所受到的张紧力也就比较小,作用在轴上面的压力也较小,链传动可以在高温,潮湿,多尘土和有污染等环境比较恶劣的场所下进行正常的工作。在进一步实施例中,为了实现零半径自转,由于轮子在垂直方向上没有转动,为了保证巡检机器人在转向时的夹角能够在既定的区域进行偏移,进而该夹角应该符合以下标准:
[0032][0033]
μ为地面对车轮间的动摩擦系数,n为接触面的压力(n),d为主动轮21的直径(m),i为选用的减速机的减速比,η为选用的电机的传动效率,t
额
为选用的电机的扭矩(n
·
m),θ1为机器人在转向时的夹角。在不计空气阻力和滚动摩擦力的条件下,因为电机已经采购型号不能更改,因此更改后对电气系统影响较大,由于现有的电机的扭矩是一定的,进而可以通过改变减速机的减速比来完成对巡检机器人转向时角度的确定。进而当地面对车轮的动摩擦系数μ=0.4,接触面的压力n=800/3n,主动轮21的直径d为0.2175m,减速机的减速比i为64,选用电机的传动效率η为0.8,选用的电机的功率为200w,因此选用的电机的扭矩t
额
为0.637n
·
m,因此可通过上述的夹角计算方式计算出角度θ1=54.2度,因此巡检机器人在进行转向工作时的角度,不能大于上述所得的角度,进而通过巡检机器人在进行转向工作时的角度,进而避免了巡检机器人在it机房上出现原地转弯的现象,进而保证巡检机器人工
作的顺利运行。在进一步实施例中,为了保证链条的极限拉伸载荷不会超过一定的标准,进而该链条极限拉伸载荷q应符合以下标准,
[0034][0035]
链条极限拉伸载荷q(n),n为许用安全系数,f1为工况系数,f
t
为有效圆周力(n),q为链条质量(kg/m),v为链条速度(m/s),k
f
为垂度系数,a为链传动中心距(m),θ2为两轮中心连线对水平面倾角,为了在工作时链条极限拉伸载荷能够在一定范围内,从而保证装置能够顺利运行,进而此时许用安全系数n为20,工况系数f1为1.1,有效圆周力f
t
为947.9n,链条质量q为1kg/m,链条速度v为0.211m/s,垂度系数k
f
为6,链传动中心距a为0.293m,由于是水平安装,因此两轮中心连线对水平面倾角θ2为0度,因此得出链条极限拉伸载荷q为21800n,进而通过计算出的链条24的极限拉伸载荷,进而实际运动过程中驱动电机334带动链条24传动时链条24所述能够承受的极限拉伸载荷需要大于计算得出的极限拉伸载荷,进而使得链条24能够完成对巡检机器人驱动的同时,还不会造成链条24的损坏,进而保证巡检机器人能够顺利进行巡检工作。在进一步实施例中,当完成对输入到控制室5中的数据进行测试和修正后,此时控制室5能够带动其中一个转动轴23开始运动,此时转动的转动轴23能够带动主动轮21开始工作,同时转动的转动轴23能够带动其两端的主动链轮25开始工作,进而运动的主动链轮25能够带动链条24开始工作,然后运动的链条24能够带动从动链轮26开始工作,此时转动的从动链轮26能够带动另一个转动轴23开始工作,进而转动的转动轴23能够带动从动轮22开始工作,此时通过主动轮21和从动轮22的运动,进而能够带动巡检机器人开始工作,此时巡检机器人上的巡检装置4能够完成对不同区域的巡检工作,进而完成对指定区域的巡检工作,保证了巡检机器人的正常工作过程。
[0036]
所述旋转装置33包括与所述下底座1固定连接的支柱31,设置在所述支柱31上的连接杆32,设置在所述连接杆32上的连接板332,与所述连接板332固定连接的驱动件331,以及设置在所述驱动件331上的转动杆333,通过设置的驱动件331,进而能够带动转动杆333开始工作,进而能够实现对驱动电机334位置的调整,进而使其能够位于既定的区域,保证巡检工作的顺利进行。
[0037]
所述旋转装置33还包括与所述转动杆333连接的驱动电机334,设置在所述驱动电机334输出端的连接销338,与所述连接销338连接的连杆335,设置在所述连杆335另一端的连接座336,以及与所述连接座336连接的连接部337,所述连接部337套接在连接杆32上、且所述连接部337与传动蜗杆341连接,所述连杆335为弧形结构,当巡检机器人开始进行巡检工作时,此时控制室5能够带动驱动件331开始运动,然后当巡检机器人在进行巡检工作过程中失控时,此时驱动件331开始工作,进而运动的驱动件331能够带动转动杆333开始工作,进而运动的转动杆333能够带动驱动电机334开始工作,此时运动的驱动电机334开始工作,进而运动的驱动电机334能够带动连接销338开始工作,进而运动的连接销338能够带动连接部337开始工作,进而运动的连接部337能够带动连接座336开始工作,然后运动的连接座336能够带动连接部337开始工作,进而能够带动转动部开始转动,通过设置的旋转装置33,进而当巡检机器人在转向时的夹角不符合上述的标准此,进而此时旋转装置33能够驱动自锁装置34开始工作,进而完成对车轮的锁定工作,进而避免巡检装置4失控时与被巡检设备之间发生碰撞,避免了巡检装置4与被巡检设备的损坏。
[0038]
所述自锁装置34包括与所述传动蜗杆341啮合的齿轮342,设置在所述齿轮342上的第一凸轮344,位于所述第一凸轮344上的限位件347,以及与所述限位件347连接的限位板346;所述第一凸轮344上设有弧形的通孔,所述限位件347上设有一个凸起端,所述凸起端穿过该通孔、且能够在该通孔中运动,所述齿轮342为凸轮结构,所述限位件347的另一端具有既定的弧度,当转动部开始转动后,此时转动的转动部能够带动传动蜗杆341开始工作,进而转动的传动蜗杆341能够带动齿轮342开始工作,进而运动的齿轮342能够带动第一凸轮344开始工作,进而运动的第一凸轮344能够带动限位件347开始工作,进而运动的限位件347能够与转动轴23接触,随着第一凸轮344的继续工作,进而限位板346上的凸起端能够在第一凸轮344上的通孔中开始运动,进而能够使限位板346开始上升,直至与限位件347相接触,进而通过限位件347和限位板346的配合使用,完成对转动轴23的限位工作,进而能够使转动轴23停止运动,从而能够使主动轮21停止运动,进而完成对转动轴23的锁紧工作;当危险状态解除时,此时驱动电机334开始反向工作,进而能够带动传动蜗杆341反向转动,进而运动的传动涡轮能够带动齿轮342开始工作,进而运动的齿轮342能够带动第一凸轮344开始工作,进而能够完成对限位板346的驱动工作,此时能够使限位板346与转动轴23分离,同时又由于下平行板343是设置在下底座1上,进而随着第一凸轮344的继续转动,进而限位件347开始运动,进而脱离转动轴23,进而完成限位件347和限位板346与转动轴23的脱离,此时转动轴23能够开始工作,进而能够带动巡检机器人开始工作,完成对巡检机器人的维修工作。
[0039]
所述自锁装置34还包括对称设置在所述转动轴23两侧、且位于所述下底座1上的一组连接件345,所述连接件345与转动轴23之间还设有轴承,所述轴承的内圈与转动轴23连接,所述轴承的外圈设置在连接件345上,通过设置的轴承,进而能够减少转动轴23转动时对连接件345径向上的压力,进而能够避免连接件345的损坏,进而保证装置的顺利运行。
[0040]
所述下底座1上还设有与所述控制室5电性连接的巡检装置4,以及设置在所述下底座1上的下平行板343,所述第一凸轮344上设有凸起部,所述凸起部位于下平行板343上、且与所述下平行板343转动连接,通过设置在下底座1上的下平行板343,进而能够使限位板346与转动轴23分离,随着第一凸轮344的继续转动,进而限位件347开始运动,进而脱离转动轴23,进而完成限位件347和限位板346与转动轴23的脱离,此时转动轴23能够开始工作,当完成对巡检机器人的维修工作后,此时转动中能够正常转动,此时巡检机器人能够完成对指定局域的巡检工作。
[0041]
工作原理说明:当需要完成对既定区域的巡检工作时,此时可现在控制中心使用ros(机器人操作系统)中实现基于2dlidar(激光雷达)的建图、定位、路径规划功能,进而通过多传感器的感知融合功能和定位功能,进而实现巡检运动的精度控制,然后将前后深度视觉探测和特征分析数据集成到多传感器感知融合功能中,进而通过前后深度视觉探测和特征分析实现避障和防撞功能,然后在指定区域中完成对避障和防撞功能的测试和修正,进而能够将测试和修正后的数据传输至控制室5中,然后通过设置的巡检装置4,能够完成对既定区域的巡检工作,当完成对输入到控制室5中的数据进行测试和修正后,此时控制室5能够带动其中一个转动轴23开始运动,此时转动的转动轴23能够带动主动轮21开始工作,同时转动的转动轴23能够带动其两端的主动链轮25开始工作,进而运动的主动链轮25能够带动链条24开始工作,然后运动的链条24能够带动从动链轮26开始工作,此时转动的从动
链轮26能够带动另一个转动轴23开始工作,进而转动的转动轴23能够带动从动轮22开始工作,此时通过主动轮21和从动轮22的运动,进而能够带动巡检机器人开始工作,此时巡检机器人上的巡检装置4能够完成对不同区域的巡检工作,进而完成对指定区域的巡检工作;当巡检机器人开始进行巡检工作时,此时控制室5能够带动驱动件331开始运动,然后当巡检机器人在进行巡检工作过程中失控时,此时驱动件331开始工作,进而运动的驱动件331能够带动转动杆333开始工作,进而运动的转动杆333能够带动驱动电机334开始工作,此时运动的驱动电机334开始工作,进而运动的驱动电机334能够带动连接销338开始工作,进而运动的连接销338能够带动连接部337开始工作,进而运动的连接部337能够带动连接座336开始工作,然后运动的连接座336能够带动连接部337开始工作,进而能够带动转动部开始转动;当转动部开始转动后,此时转动的转动部能够带动传动蜗杆341开始工作,进而转动的传动蜗杆341能够带动齿轮342开始工作,进而运动的齿轮342能够带动第一凸轮344开始工作,进而运动的第一凸轮344能够带动限位件347开始工作,进而运动的限位件347能够与转动轴23接触,随着第一凸轮344的继续工作,进而限位板346上的凸起端能够在第一凸轮344上的通孔中开始运动,进而能够使限位板346开始上升,直至与限位件347相接触,进而通过限位件347和限位板346的配合使用,完成对转动轴23的限位工作,进而能够使转动轴23停止运动,从而能够使主动轮21停止运动,进而完成对转动轴23的锁紧工作;当危险状态解除时,此时驱动电机334开始反向工作,进而能够带动传动蜗杆341反向转动,进而运动的传动涡轮能够带动齿轮342开始工作,进而运动的齿轮342能够带动第一凸轮344开始工作,进而能够完成对限位板346的驱动工作,此时能够使限位板346与转动轴23分离,同时又由于下平行板343是设置在下底座1上,进而随着第一凸轮344的继续转动,进而限位件347开始运动,进而脱离转动轴23,进而完成限位件347和限位板346与转动轴23的脱离,此时转动轴23能够开始工作,进而能够带动巡检机器人开始工作,完成对巡检机器人的维修工作。
[0042]
以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1