一种柔性装箱装置的制作方法
1.本实用新型属于兽药生产装置领域,具体涉及一种柔性装箱装置。
背景技术:
2.兽药灌装生产完毕,需要将产品进行装箱,刚性装箱由于容易引发破损和扬尘土等弊端,因此柔性装箱装置备受青睐,但现有的柔性装箱装置其装箱效率仍由待进一步提高,针对上述不足,现需要一种柔性装箱装置,可大大提高产品的装箱效率。
技术实现要素:
3.本实用新型的目的是提供一种柔性装箱装置,可大大提高产品的装箱效率。
4.本实用新型提供了如下的技术方案:
5.一种柔性装箱装置,包括平行并列设置的若干条用于输送产品的输送带,输送带的末端设有中转平台,且中转平台包括上料板,所述上料板的下沿距离输送带的输送面1至2毫米;
6.上料板远离输送带的一端,沿竖直方向设有挡料板,挡料板的外侧设有第一机械手臂和第二机械手臂,第一机械手臂和第二机械手臂的末端分别设有用于转移产品的第一真空吸附板和第二真空吸附板;且第一机械手臂和第二机械手臂的一侧依次设有第一装箱台和第二装箱台。
7.优选的,输送带总共设有三条,分别为第一输送带、第二输送带、第三输送带,第一输送带、第二输送带、第三输送带的两端分别设有传动轮,所述传动轮由同一转轴贯穿连接,并由电机驱动转轴。
8.优选的,第一输送带、第二输送带、第三输送带的表面均设有防滑纹。
9.优选的,第一真空吸附板为空心的长方体结构,第一真空吸附板上端中央与第一机械手臂连接,第一真空吸附板的下侧设有若干吸附孔,第一真空吸附板的上侧还设有抽吸口;第一真空吸附板和第二真空吸附板结构相同。
10.优选的,第一机械手臂和第二机械手臂均采用多关节式机械手臂。
11.本实用新型的有益效果:
12.本实用新型通过将产品累积到上料板,通过第一机械手臂和第二机械手臂配合,通过真空吸附板进行吸附转移装箱,可大大提高装箱效率,且真空吸附板无需施压正压,直接可实现产品的脱离,大大提高了使用的便捷和可靠性。
附图说明
13.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
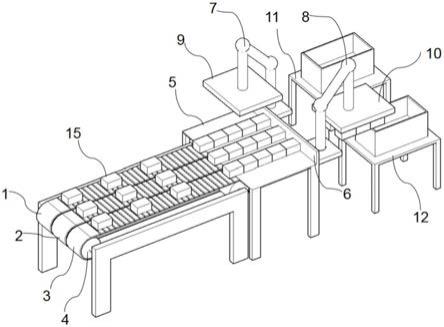
14.图1为本实用新型结构图;
15.图2为第一真空吸附板结构图。
16.图中标记为:1、第一输送带;2、第二输送带;3、第三输送带;4、传动轮;5、上料板;6、挡料板;7、第一机械手臂;8、第二机械手臂;9、第一真空吸附板;10、第二真空吸附板;11、第一装箱台;12、第二装箱台;13、抽吸口;14、吸附孔;15、产品。
具体实施方式
17.如图1和图2所示,一种柔性装箱装置,包括平行并列设置的若干条用于输送产品的输送带,输送带的末端设有中转平台,且中转平台包括上料板5,所述上料板5的下沿距离输送带的输送面1毫米,以确保上料的平稳,为了确保上料顺畅,上料板5的边缘为楔形即进行开刃,但要进行打磨圆润处理,避免划伤产品;输送带将产品输送至上料板上,后续到来的产品会推着上料板4已送达产品,往前运动;同时在上料板5远离输送带的一端,沿竖直方向设有挡料板6,避免产品滑落,挡料板6的外侧设有第一机械手臂7和第二机械手臂8,第一机械手臂7和第二机械手臂8的末端分别设有用于转移产品的第一真空吸附板9和第二真空吸附板10;且第一机械手臂7和第二机械手臂8的一侧依次设有第一装箱台11和第二装箱台12;由于第一机械手臂7在装箱过程,上料板5会有空置时间,此时第二机械手臂8通过第二真空吸附板10进行吸附操作,然后进行装箱,第一机械手臂7和第二机械手臂8可以加快装箱的速率,输送带的输送效率需要与机械手臂进行配合调整,现在技术可以轻而易举实现,就不再赘述;第一真空吸附板9为空心的长方体结构,第一真空吸附板9上端中央与第一机械手臂7连接,第一真空吸附板9的下侧设有若干吸附孔14,第一真空吸附板9的上侧还设有抽吸口13;第一真空吸附板9和第二真空吸附板10结构相同;第一机械手臂7和第二机械手臂8均采用多关节式机械手臂,此类机械手臂灵活,没有操作死角;
18.当第一真空吸附板9紧贴产品时,通过抽吸口13将第一真空吸附板9抽为真空,通过吸附孔14将产品吸附,第一机械手臂7将产品转移至箱子内时,停止抽吸;由于产品不可能完全覆盖每个吸附孔14,停止抽吸即可实现脱离真空,实现卸货作业;然后进行下一轮作业,将产品叠加,直至数量符合需求;同理另一条装箱线原理一样;第一输送带1、第二输送带2、第三输送带3的表面均设有防滑纹,确保输送产品的稳定性;输送带总共设有三条,分别为第一输送带1、第二输送带2、第三输送带3;其数量不局限三条,可以更加实际生产而定,第一输送带1、第二输送带2、第三输送带3的两端分别设有传动轮4,所述传动轮4由同一转轴贯穿连接,并由电机驱动转轴,进而确保第一输送带1、第二输送带2、第三输送带3同步转动。
19.以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围。
技术特征:
1.一种柔性装箱装置,其特征在于:包括平行并列设置的若干条用于输送产品的输送带,输送带的末端设有中转平台,且中转平台包括上料板,所述上料板的下沿距离输送带的输送面1至2毫米;上料板远离输送带的一端,沿竖直方向设有挡料板,挡料板的外侧设有第一机械手臂和第二机械手臂,第一机械手臂和第二机械手臂的末端分别设有用于转移产品的第一真空吸附板和第二真空吸附板;且第一机械手臂和第二机械手臂的一侧依次设有第一装箱台和第二装箱台。2.根据权利要求1所述的一种柔性装箱装置,其特征在于:输送带总共设有三条,分别为第一输送带、第二输送带、第三输送带,第一输送带、第二输送带、第三输送带的两端分别设有传动轮,所述传动轮由同一转轴贯穿连接,并由电机驱动转轴。3.根据权利要求2所述的一种柔性装箱装置,其特征在于:第一输送带、第二输送带、第三输送带的表面均设有防滑纹。4.根据权利要求3所述的一种柔性装箱装置,其特征在于:第一真空吸附板为空心的长方体结构,第一真空吸附板上端中央与第一机械手臂连接,第一真空吸附板的下侧设有若干吸附孔,第一真空吸附板的上侧还设有抽吸口;第一真空吸附板和第二真空吸附板结构相同。5.根据权利要求4所述的一种柔性装箱装置,其特征在于:第一机械手臂和第二机械手臂均采用多关节式机械手臂。
技术总结
本实用新型提供一种柔性装箱装置,具体涉及兽药生产装置领域,包括平行并列设置的若干条用于输送产品的输送带,输送带的末端设有中转平台,且中转平台包括上料板,所述上料板的下沿距离输送带的输送面1至2毫米;上料板远离输送带的一端,沿竖直方向设有挡料板,挡料板的外侧设有第一机械手臂和第二机械手臂,第一机械手臂和第二机械手臂的末端分别设有用于转移产品的第一真空吸附板和第二真空吸附板;且第一机械手臂和第二机械手臂的一侧依次设有第一装箱台和第二装箱台。本实用新型可大大提高产品的装箱效率。提高产品的装箱效率。提高产品的装箱效率。
技术研发人员:马光友 陈振江 李俊慧
受保护的技术使用者:南京日升昌生物技术有限公司
技术研发日:2021.04.02
技术公布日:2021/12/30
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1