电阻片线性测试机的制作方法
[0001]
本实用新型涉及电阻片印刷技术领域,尤其涉及电阻片线性测试机。
背景技术:
[0002]
对于电阻片的测试,会采用测试机进行测试。现有技术中,测试机的自动化程度较低,检测的效果不太理想,并且检测的效率低,不适用于企业的大规模生产检测工作。鉴于这种情况,亟待一种自动化程度高的测试设备。
技术实现要素:
[0003]
基于此,本实用新型的目的在于提供电阻片线性测试机,自动化程度高,确保检测的质量的同时,也提升检测的效率。
[0004]
本实用新型提供一种电阻片线性测试机,包括机箱,所述机箱上设置有控制装置、进料结构、取料结构、检测结构、出料结构、收集箱a、收集箱b,所述收集箱a设置在所述取料结构的一侧,所述收集箱b设置在所述取料结构的相对另一侧。
[0005]
所述进料结构包括振筛、与所述振筛的出料口连接的送料轨道、设置在所述送料轨道末端的支撑座、设置在所述支撑座上的推料结构。
[0006]
所述取料结构包括安装板、固定设置在所述安装板上的电机a、与所述电机a的动力输出端连接的主动轮、设置在所述安装板上并且与所述主动轮对应的从动轮、连接在所述主动轮和所述从动轮之间的传动皮带、与所述主动轮转动连接的传动臂a、与所述从动轮转动连接的传动臂b、分别与所述传动臂a和所述传动臂b转动连接的连接竖杆、与所述连接竖杆连接的连接横杆、分别固定设置在所述连接横杆的相对两侧的真空吸气缸a和真空吸气缸b。
[0007]
所述检测结构包括放置组件、检测组件、压料组件;所述检测组件包括固定板、固定设置在所述固定板一侧的气缸b、与所述固定板滑动连接的安装座、固定设置在所述安装座上的电机b、与所述电机b的动力输出端连接的转轴、与所述转轴末端连接的检测轴、与所述安装座固定并且与所述检测轴对应的检测探针。
[0008]
作为优选方案,所述推料结构包括气缸a、承料块、推拉轴a,所述推拉轴a的一端与所述气缸a的动力输出端连接,所述推拉轴a的另一端与所述承料块连接,所述承料块上设置有电阻片放置槽a。
[0009]
作为优选方案,所述放置组件包括座体、固定设置在所述座体一侧的气缸c、滑动设置在所述座体上并且与所述气缸c的动力输出端连接的滑块、开设在所述滑块上表面的电阻片放置槽b。
[0010]
作为优选方案,所述滑块的下部连接有竖板,所述竖板上固定设置有气缸d,所述气缸d的动力输出端连接有伸缩轴,所述伸缩轴的末端连接有伸出块,所述伸出块上设置有精确定位针,所述滑块设置有供所述精确定位针贯穿的通孔,所述座体设置有供所述竖板沿座体长度方向来回移动的条形孔。
[0011]
作为优选方案,所述压料组件包括t形固定板、所述t形固定板上固定设置有气缸e,所述气缸e的动力输出端连接有定位块,所述定位块的一侧面与所述固定板滑动连接,所述定位块另一侧面连接有压块,所述t形固定板与所述固定板连接。
[0012]
作为优选方案,所述出料结构包括气缸f,所述气缸f的动力输出端连接有出料滑槽,所述出料滑槽与所述取料结构的位置相对应,所述收集箱b设置在所述出料滑槽的下方。
[0013]
作为优选方案,所述机箱上设置有用于安装所述检测结构的支架,所述支架上设置有与所述收集箱a对应的落料孔,所述落料孔的上表面设有围板。
[0014]
作为优选方案,所述送料轨道上靠近振筛出料口的位置设置有对射型光电感应器。
[0015]
作为优选方案,所述支撑座上与所述电阻片放置槽a对应的位置设置有对射型光纤感应器。
[0016]
作为优选方案,所述支撑座上与所述电阻片放置槽a对应的位置设置有反射型光纤感应器。
[0017]
本实用新型的有益效果为:通过进料结构对电阻片进行输送,检测结构对电阻片线性进行自动检测,而取料结构实现取料检测以及取料分类放置的功能,再结合收集箱a收集放置位置不对的电阻片,收集箱b收集检测不通过的电阻片,出料结构处理检测通过的电阻片,从而提升自动化程度检测的程度,确保检测的质量的同时,也提升检测的效率。
附图说明
[0018]
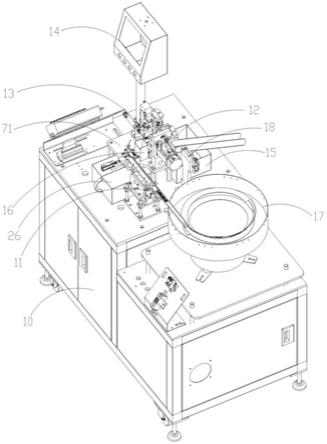
图1为本实用新型的整体结构示意图。
[0019]
图2为本实用新型的整体结构俯视图。
[0020]
图3为进料结构的示意图。
[0021]
图4为取料结构的示意图。
[0022]
图5为检测结构的整体结构示意图。
[0023]
图6为检测结构的整体结构正面视图。
[0024]
图7为检测组件的示意图。
[0025]
图8为放置组件的示意图。
[0026]
图9为压料组件的示意图。
[0027]
附图标记为:机箱10、控制装置14、进料结构11、取料结构12、检测结构13、出料结构18、收集箱b15、围板16、振筛17、气缸a19、支撑座20、对射型光纤感应器21、反射型光纤感应器22、送料轨道23、对射型光电感应器24、电阻片放置槽a25、收集箱a26、真空吸气缸b27、传动臂a28、主动轮29、安装板31、从动轮32、传动臂b33、电机a34、连接竖杆35、连接横杆36、真空吸气缸a37、气缸f38、出料滑槽39、座体41、滑块42、气缸c43、气缸b44、电机b45、转轴46、检测轴47、电阻片49、电阻片放置槽b50、固定板51、安装座52、精确定位针53、精确定位针54、竖板55、伸出块56、伸缩轴57、气缸d58、放置组件60、检测组件59、压料组件61、检测探针62、气缸e63、t形固定板64、定位块65、压块66、传动皮带67、承料块68、推拉轴a69、条形孔70、支架71。
具体实施方式
[0028]
为能进一步了解本实用新型的特征、技术手段以及所达到的具体目的、功能,下面结合附图与具体实施方式对本实用新型作进一步详细描述。
[0029]
请参阅图1-9所示:电阻片线性测试机,包括机箱10,机箱10上设置有控制装置14、进料结构11、取料结构12、检测结构13、出料结构18、收集箱a26、收集箱b15,收集箱a26设置在取料结构12的一侧,收集箱b15设置在取料结构12的相对另一侧。
[0030]
进料结构11包括振筛17、与振筛17的出料口连接的送料轨道23、设置在送料轨道23末端的支撑座20、设置在支撑座20上的推料结构,振筛17与控制装置连接。推料结构包括气缸a19、承料块68、推拉轴a69,气缸a19与控制装置连接,推拉轴a69的一端与气缸a19的动力输出端连接,推拉轴a69的另一端与承料块68连接,承料块68上设置有电阻片放置槽a25,承料块68活动设置在支撑座20上。实际操作时,振筛17将电阻片依次供给到送料轨道23内,电阻片依次进入到支撑座20的位置,并且落入到电阻片放置槽a25内,气缸a19动力输出,通过推拉轴a69带动承料块68靠向取料结构12的方向移动既定的距离。
[0031]
取料结构12包括安装板31、固定设置在安装板31上的电机a34、与电机a34的动力输出端连接的主动轮29、设置在安装板31上并且与主动轮29对应的从动轮32、连接在主动轮29和从动轮32之间的传动皮带67、与主动轮29转动连接的传动臂a28、与从动轮32转动连接的传动臂b33、分别与传动臂a28和传动臂b33转动连接的连接竖杆35、与连接竖杆35连接的连接横杆36、分别固定设置在连接横杆36的相对两侧的真空吸气缸a37和真空吸气缸b27;电机a34、真空吸气缸a37和真空吸气缸b27与控制装置连接。进料阶段的取料动作时,电机a34动力输出带动主动轮29转动,主动轮29转动通过传动皮带67同步带动从动轮32转动,主动轮29和从动轮32的同时转动,从而通过传动臂a28和传动臂b33带动连接竖杆35和连接横杆36发生位移,连接横杆36在位移的过程中带动真空吸气缸a37和真空吸气缸b27实现在收集箱a26和收集箱b15两侧的来回移动,再通过真空吸气缸a37或者真空吸气缸b27完成取料或者放料的动作。
[0032]
检测结构13包括放置组件60、检测组件59、压料组件61。检测组件59包括固定板51、固定设置在固定板51一侧的气缸b44、与固定板51滑动连接的安装座52、固定设置在安装座52上的电机b45、与电机b45的动力输出端连接的转轴46、与转轴46末端连接的检测轴47、与安装座52固定并且与检测轴47对应的检测探针62,电机b45和气缸b44与控制装置连接。
[0033]
放置组件60包括座体41、固定设置在座体41一侧的气缸c43、滑动设置在座体41上并且与气缸c43的动力输出端连接的滑块42、开设在滑块42上表面的电阻片放置槽b50。滑块42的下部连接有竖板,竖板55上固定设置有气缸d58,气缸c43和气缸d58均与控制装置连接,气缸d58的动力输出端连接有伸缩轴57,伸缩轴57的末端连接有伸出块56,伸出块56上设置有精确定位针53和精确定位针54,滑块设置有供精确定位针53和精确定位针54贯穿的通孔,座体41设置有供竖板55沿座体41长度方向来回移动的条形孔70。
[0034]
压料组件61包括t形固定板64、t形固定板64上固定设置有气缸e63,气缸e63与控制装置连接,气缸e63的动力输出端连接有定位块65,定位块65的一侧面与固定板51滑动连接,定位块65另一侧面连接有压块66,t形固定板64与固定板51连接。
[0035]
原始状态时,气缸c43动力输出带动滑块42移动至靠向取料结构12的一侧,真空吸
气缸b27将电阻片放置到电阻片放置槽b50内后,气缸c43动力输出带动滑块42移动到与检测组件59对应的位置,气缸d58动力输出,通过伸缩轴57带动伸出块56向上移动,从而同步带动精确定位针53和精确定位针54向上移动,使精确定位针53和精确定位针54向上插入到放置在电阻片放置槽b50内的电阻片的定位孔上,从而实现精确定位;接着,气缸e63动力输出带动定位块65向下移动,定位块65向下移动的过程中同步带动压块66向下移动,从而将电阻片压紧固定;电阻片被压紧固定后,气缸b44动力输出带动安装座52向下移动,安装座52向下移动的过程中同步带动电机b45向下移动,电机b45移动至既定位置后,检测轴47和检测探针62均与电阻片的上表面接触,检测探针62与电阻片接触后即可进行检测工作,而电机b45动力输出,通过转轴46带动检测轴47转动,检测轴47在转动过程中对电阻片进行检测工作,完成既定时间的检测工作后,检测组件59将检测结构反馈到控制装置,控制装置根据检测结构,将相应的处理处理发送给取料结构12、出料结构18。
[0036]
通过气缸c43动力输出带动滑块42再次移动至靠向取料结构12的一侧,真空吸气缸a37将电阻片吸附起来向出料结构18方向移动,若电阻片符合检测要求,气缸f38动力输出,带动出料滑槽39移动至与真空吸气缸a37对应的位置,真空吸气缸a37将电阻片放下,电阻片沿着出料滑槽39进入到良品收集点;若电阻片不符合检测要求,真空吸气缸a37将电阻片放置到收集箱b15内。
[0037]
出料结构18包括气缸f38,气缸f38的动力输出端连接有出料滑槽39,出料滑槽39与取料结构12的位置相对应,收集箱b15设置在出料滑槽39的下方,气缸f38与控制装置连接。实施操作时,当检测结构13检测到电阻片符合要求,检测结构13将指令发送到控制装置,控制装置再发出指令到气缸f38,气缸f38动力输出,带动出料滑槽39移动至与真空吸气缸a37对应的位置,真空吸气缸a37将电阻片放置到出料滑槽39上,电阻片沿着出料滑槽39进入到良品收集点;当检测结构13检测到电阻片不符合要求,检测结构13将指令发送到控制装置,控制装置向气缸f38发出停止运动的指令,真空吸气缸a37将电阻片放置到收集箱b15。
[0038]
机箱10上设置有用于安装检测结构13的支架71,支架71上设置有与收集箱a26对应的落料孔,落料孔的上表面设有围板16,通过设置围板16,避免电子片从高处落下碰撞到落料孔的其它地方,导致不能准确落入到收集箱a26内。
[0039]
送料轨道23上靠近振筛17出料口的位置设置有对射型光电感应器24,对射型光电感应器与控制装置连接。通过对射型光电感应器24感应振筛17的出料口进入送料轨道23的情况,若对射型光电感应器24没有感应到电阻片49,对射型光电感应器24会将信息反馈到控制装置,提醒需要进行加料。
[0040]
支撑座20上与电阻片放置槽a25对应的位置设置有对射型光纤感应器21,对射型光纤感应器21与控制装置连接。对射型光纤感应器21用以感应电阻片放置槽a25上是否有电阻片49,若检测到有电阻片49,对射型光纤感应器21就将信息反馈给控制装置,控制装置就将指令发送给取料结构12进行取料动作。
[0041]
支撑座20上与电阻片放置槽a25对应的位置设置有反射型光纤感应器22,反射型光纤感应器22与控制装置连接。反射型光纤感应器22用以检测电阻片49放置在电阻片放置槽a25上的正反面是否正确,若放置面是正确的,反射型光纤感应器22将信号反馈到控制装置,控制装置发送指令给推料结构,推料结构接到指令后将承料块68移动一定距离,供取料
结构12进行取料,然后放置到电阻片放置槽b50内进行检测;若放置面不正确,反射型光纤感应器22将信号反馈到控制装置,控制装置发送指令给推料结构,推料结构接到指令后将承料块68移动一定距离,供取料结构12进行取料,然后放置到收集箱b15进行回收处理。
[0042]
本实施方式的操作原理是:
[0043]
1、待检测的电阻片通过振筛17进入到送料轨道23,电阻片沿着送料轨道23移动至电阻片放置槽a25内,承料块68带动电阻片向取料结构12的方向移动既定的距离,为取料结构12的取料做准备;
[0044]
2、真空吸气缸b27将电阻片抓取后放在电阻片放置槽b50上,滑块42被气缸c43带动到检测轴47的正下方,精确定位针53和精确定位针54穿过电阻片从而将电阻片进行精确定位,压块66下压将电阻片压紧;
[0045]
3、检测轴47和检测探针62下压与电阻片接触,检测探针62跟电阻片接触后就进行检测,检测轴47在转轴46的带动下进行转动,检测轴47在电阻片的表面进行转动接触进行测试;
[0046]
4、完成测试后,真空吸气缸a37将电阻片吸附起来,对于符合检测要求的电阻片,气缸f38动力输出,带动出料滑槽39移动至与真空吸气缸a37对应的位置,真空吸气缸a37将电阻片放置到出料滑槽39上,电阻片沿着出料滑槽39进入到良品收集点;对于检测不符合要求的电阻片,真空吸气缸a37将电阻片放置到收集箱b15;
[0047]
5、真空吸气缸b27复位到起始位置,为下一次的抓取动作做准备,如何重复操作。
[0048]
以上所述实施例仅表达了本实用新型的一种实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1