一种旋转式柑橘去皮机
1.本实用新型涉及农产品加工的自动化技术领域,更具体的说,尤其涉及一种旋转式柑橘去皮机。
背景技术:
2.目前,传统的橘子剥皮大多数还是采用的人工剥皮,但传统的人工剥皮效率低,成本高。而少部分工厂采用去皮机器来去皮,然而现有的很多大型工厂使用的去皮机器都不能去除干净,故而还需要人工将未完整去皮的橘子挑选出来进行去皮。
3.针对现有的技术问题,需要一种操作简单、快捷的橘子去皮装置,用以解决现在在橘子剥皮市场存在的问题。
技术实现要素:
4.本实用新型的目的在于解决现有的传统橘子剥皮采用手动剥皮倒置的成本高效率低、去皮机器去皮不干净的问题,提出了一种旋转式柑橘去皮机,可以完全自动的、高效的对放入的橘子进行去皮。
5.本实用新型通过以下技术方案来实现上述目的:一种旋转式柑橘去皮机,包括橘肉收集装置、橘皮收集装置、旋转第一电机、橘皮切割装置、橘子进料装置、橘肉橘皮分离装置、橘肉导向装置、盛料旋转装置和橘子剥皮支撑架,所述橘子剥皮支撑架上表面为水平平台,所述橘皮收集装置安装在橘子剥皮支撑架中部,橘肉收集装置安装在橘子剥皮支撑架下端,橘肉导向装置的出口处连接橘肉收集装置的入口;所述旋转第一电机通过螺钉固定连接在橘子剥皮支撑架的水平平台下方;所述盛料旋转装置通过轴承支撑在橘子剥皮支撑架的水平平台上,旋转第一电机的输出轴连接盛料旋转装置并驱动盛料旋转装置的转动;所述盛料旋转装置上方设置有橘子进料工位、橘子切割工位和橘肉橘皮分离工位,盛料旋转装置转动时盛料旋转装置上用于盛放橘子的盛料旋转盛料盒依次经过橘子进料工位、橘子切割工位和橘肉橘皮分离工位;所述橘子进料装置固定在橘子剥皮支撑架上且橘子进料装置设置在橘子进料工位的上方;所述橘皮切割装置固定在橘子剥皮支撑架上,橘皮切割装置的切割部分位于橘子切割工位的侧面,所述橘肉橘皮分离装置和橘肉导向装置固定在橘肉橘皮分离工位两侧的橘子剥皮支撑架上;
6.所述橘皮切割装置包括橘子切割第一支撑架、橘子切割旋转夹具、橘子切割第二气缸、橘子切割第二支撑架和橘子切割切刀,所述橘子切割第一支撑架整体呈龙门架状,橘子切割第一支撑架横跨整个盛料旋转装置且固定在橘子剥皮支撑架上;橘子切割第二气缸通过橘子切割第二支撑架固定在橘子切割工位正上方的橘子切割第一支撑架上,橘子切割第二气缸竖直朝下设置,橘子切割第二气缸的输出端连接橘子切割切刀,橘子切割第二气缸工作时带动橘子切割切刀在橘子切割工位上方做上下运动;所述橘子切割旋转夹具设有左右对称的一对,两组橘子切割旋转夹具分别设置在橘子切割工位的两侧;所述橘子切割旋转夹具包括橘子切割电机、橘子切割第一气缸、橘子切割内轴、橘子切割连接架、橘子切
割外轴、橘子切割电机固定架、橘子切割第一同步轮、橘子切割第二同步轮、橘子切割同步带和橘子切割吸盘,所述橘子切割第一支撑架上设置有竖直设置的第一气缸连接架,橘子切割第一气缸水平安装在第一气缸连接架上,橘子切割第一气缸的输出端连接水平设置的橘子切割连接架的一端,所述橘子切割连接架的另一端连接锯子切割外轴的一端;所述橘子切割第一支撑架上还设有两块竖直且平行于第一气缸连接架设置的外轴支撑板,橘子切割外轴外部主干通过滚珠连接在两块外轴支撑板上,所述橘子切割电机固定架固定在橘子切割外轴的外部主干中部,橘子切割电机水平固定在橘子切割电机固定架上,橘子切割电机的输出端连接橘子切割第一同步轮;所述橘子切割内轴套装在橘子切割外轴内部且橘子切割内轴和橘子切割外轴通过轴承连接,橘子切割内轴的一端与橘子切割吸盘固定连接,橘子切割内轴靠近吸盘端通过螺钉固定橘子切割第二同步轮,所述橘子切割第一同步轮和橘子切割第二同步轮通过橘子切割同步带连接;所述切割第一气缸工作时驱动第一气缸连接架、橘子切割外轴、橘子切割内轴、橘子切割电机和橘子切割吸盘组成的整体水平运动,所述橘子切割电机工作时通过橘子切割第一同步轮、锯子切割同步带和橘子切割第二同步轮组成的同步带机构带动橘子切割内轴和橘子切割吸盘组成的整体转动;
7.所述橘子进料装置包括橘子进料支撑架、橘子进料红外线传感器、橘子进料导管、橘子进料电机、橘子进料三角挡板和橘子进料支撑轴,所述橘子进料支撑架固定连接在橘子剥皮支撑架上,橘子进料导管竖直安装在所述橘子进料支撑架上且橘子进料导管设置在橘子进料工位的正上方;所述橘子进料支撑架通过螺栓固定在橘子进料导管的侧面,橘子进料导管上设置有橘子进料支撑轴,所述橘子进料支撑轴中部与橘子进料三角挡板固定连接,橘子进料三角挡板设置有三根沿着周向均匀分布的橘子进料挡板,橘子进料电机固定在橘子进料支撑架上,橘子进料电机的输出轴连接橘子进料支撑轴的一端,橘子进料电机工作时通过橘子进料支撑轴驱动橘子进料三角挡板进行转动,橘子进料三角挡板的三根橘子进料挡板绕着橘子进料支撑轴旋转时依次从橘子进料导管经过实现橘子进料导管中的橘子依次进入下方的橘子进料工位中;所述橘子进料红外线传感器固定连接在橘子进料支撑架的下方,橘子进料红外线传感器正对橘子进料工位;
8.所述橘肉橘皮分离装置包括橘肉橘皮分离支撑架、橘肉橘皮分离连接架、橘肉橘皮分离外轴、橘肉橘皮分离内轴、橘肉橘皮分离推盘和橘肉橘皮分离气缸;所述橘肉橘皮分离支撑架上端通过螺栓固定连接在橘皮切割装置的橘子切割第一支撑架上,橘肉橘皮分离气缸水平安装在橘肉橘皮分离支撑架的下端;所述橘肉橘皮分离气缸输出端连接橘肉橘皮分离连接架的一端;所述橘肉橘皮分离连接架的另一端与橘肉橘皮分离外轴的一端固定连接;橘肉橘皮分离外轴的外部主干穿过橘肉橘皮分离支撑架上的两个光孔,所述橘肉橘皮分离内轴套装在橘肉橘皮分离外轴内部,橘肉橘皮分离外轴与橘肉橘皮分离内轴通过轴承连接,橘肉橘皮分离内轴远离橘肉橘皮分离气缸的一端与橘肉橘皮分离推盘固定连接;所述橘肉橘皮分离气缸工作时驱动橘肉橘皮分离连接架、橘肉橘皮分离外轴、橘肉橘皮分离内轴和橘肉橘皮分离推盘组成的整体水平运动;
9.所述橘肉导向装置包括橘子导向导管支撑架和橘子导向导管,所述橘子导向导管支撑架底端通过螺栓固定连接在橘子剥皮支撑架上,橘子导向导管固定安装在橘子导向导管支撑架的上端;所述橘子导向导管整体呈弧形管设置,橘子导向导管的入口口径大于橘肉橘皮分离装置的橘肉橘皮分离推盘外径,橘子导向导管的入口的轴心线和橘肉橘皮分离
推盘的轴心线在同一条直线的,橘肉橘皮分离推盘在橘肉橘皮分离气缸的推动下将橘肉橘皮分离工位中的橘子推入橘子导向导管的入口中;
10.所述盛料旋转装置包括盛料旋转盛料盒、盛料旋转挡圈、盛料旋转轴、盛料旋转轴承和盛料旋转盘,所述盛料旋转挡圈固定连接在橘子剥皮支撑架上,盛料旋转盘的底部中心位置连接盛料旋转轴,所述盛料旋转轴通过盛料旋转轴承与盛料旋转挡圈连接;所述盛料旋转盘的上表面上设置有沿周向均匀布置的至少三个盛料旋转盛料盒。
11.旋转第一电机通过盛料旋转轴带动盛料旋转盘转动时盛料旋转盘上的盛料旋转盛料盒依次经过橘子进料工位、橘子切割工位和橘肉橘皮分离工位。
12.进一步的,所述橘子剥皮支撑架下方设置有两条平行且水平设置的第一导轨,两条第一导轨分布在剥皮机支撑架下方内部左右两侧,第一滑块套装在两条第一导轨上,橘肉收集装置固定在第一滑块上。
13.进一步的,所述橘子剥皮支撑架中部设置有两条平行且水平设置的第二导轨,两条第二导轨分布在剥皮机支撑架内部中间左右两侧,第二滑块套装在两条第二导轨上,橘皮收集装置固定在第二滑块上。
14.进一步的,所述旋转第一电机通过电机架固定在橘子剥皮支撑架上,旋转第一电机和电机架之间设有相互配合的螺纹孔,电机架和橘子剥皮支撑架之间设置有相互配合的螺纹孔。
15.固定橘皮切割装置的位置应避免与盛料旋转装置之间发生干涉,所以采用龙门架形状的橘子切割第一支撑架来固定两组橘子切割旋转夹具,使其位于盛料旋转装置上方橘子切割工位的左右两侧。
16.所述橘子切割切刀与相应的盛料旋转装置上的盛料旋转盛料盒相对齐,以便橘子切割切刀能够均匀的切割原料两边。
17.橘子进料装置设置在橘子进料工位的正上方,所述橘子进料装置需使原料的出口与盛料旋转装置上盛料旋转盛料盒相对齐,以确保原料能够顺利放置到盛料旋转盛料盒中。
18.所述橘肉橘皮分离推盘、盛料旋转盛料盒上面的原料和橘子导向导管的入口保持对齐,以便橘肉橘皮分离推盘能够将原料推入橘子导向导管中。
19.进一步的,所述橘子剥皮支撑架的水平平台上和盛料旋转盘上均设置有镂空通孔,橘皮收集装置上端开口且设置在盛料旋转盘正下方。橘子剥皮支撑架和盛料旋转盘上在剥皮位置设置出的多处镂空通孔,以便果皮能够顺利放置进橘皮收集装置中。
20.所述橘子切割外轴外部主干通过滚珠连接在两块外轴支撑板上,以便橘子切割外轴能够相对橘子切割第一支撑架做平移运动。
21.进一步的,所述橘子切割外轴内部装有轴承,橘子切割外轴与橘子切割内轴之间通过轴承进行连接,并且在橘子切割内轴的轴承左右两端装有用于限位的挡圈,以保证橘子切割外轴与橘子切割内轴之间只能做转动。
22.所述橘皮切割装置的橘子切割旋转夹具设置有左右对称的一对,相对的橘子切割吸盘也有两个,两个橘子切割吸盘成左右对称分布,两个橘子切割吸盘需对齐,两个橘子切割吸盘的轴心线在同一条直线上,以确保能够夹紧原料。
23.所述橘子切割第一同步轮和橘子切割第二同步轮上下位置保持对齐,以便橘子切
割电机能够通过橘子切割同步带带动橘子切割吸盘进行转动。
24.进一步的,所述橘子进料红外线传感器正对橘子进料工位,以便能够感应到盛料旋转盛料盒,当盛料旋转盛料盒到达指定位置时,橘子进料装置能够放置原料进入盛料旋转盛料盒中。
25.进一步的,所述橘子切割切刀包括水平设置的刀架和两块竖直设置的刀片,两块刀片设置在刀架的两端底部,两块刀片均竖直朝下设置。
26.进一步的,两块刀片活动固定在刀架的两端,两块刀片之间的间距可调。刀片通过螺栓和条形槽配合的方式安装,通过调整螺栓在条形槽上的位置调节两块刀片之间的距离。
27.本实用新型的控制系统包括plc控制器、四个伺服驱动器、四个伺服电机、四个编码盘、四个伸缩气缸、四个电磁控制阀和六个限位器;四个伺服驱动器分别为第一伺服驱动器、第二伺服驱动器、第三伺服驱动器和第四伺服驱动器;四个编码盘分别为第一编码盘、第二编码盘、第三编码盘和第四编码盘;四个电磁控制阀分别为第一电磁控制阀、第二电磁控制阀、第三电磁控制阀和第四电磁控制阀;六个限位器分别为第一限位器、第二限位器、第三限位器、第四限位器、第五限位器和第六限位器;所述plc控制器的输出端分别与第一伺服驱动器、第二伺服驱动器、第三伺服驱动器、第四伺服驱动器、第一电磁控制阀、第二电磁控制阀、第三电磁控制阀、第四电磁控制阀的输入端并联连接;所述第一伺服驱动器的输出端与旋转第一电机的信号输入端进行连接;所述第一编码盘的一端与旋转第一电机的输出轴相连接,第一编码盘的另一端与第一伺服驱动器连接;所述第二伺服驱动器的输出端与橘子切割电机的信号输入端进行连接;所述第二编码盘的一端与橘子切割电机的输出轴相连接,第二编码盘的另一端与第二伺服驱动器连接;所述第三伺服驱动器的输出端与橘子切割电机的信号输入端进行连接;所述第三编码盘的一端与橘子切割电机的输出轴相连接,第三编码盘的另一端与第三伺服驱动器连接;所述第四伺服驱动器的输出端与橘子进料电机的信号输入端进行连接;所述第四编码盘的一端与橘子进料电机的输出轴相连接,第四编码盘的另一端与第四伺服驱动器连接;所述第一电磁控制阀的输出端与橘子切割第一气缸的输入端连接;所述第二电磁控制阀的输出端与橘子切割第一气缸的输入端连接;所述第三电磁控制阀的输出端与橘子切割第二气缸的输入端连接;所述第四电磁控制阀的输出端与橘肉橘皮分离气缸的输入端连接;所述第一限位器输出端连接控制器的输入端,第一限位器的输入端连接橘子切割吸盘的进程末端;所述第二限位器输出端连接控制器的输入端,第二限位器的输入端连接橘子切割切刀的进程末端;所述第三限位器输出端连接控制器的输入端,第三限位器的输入端连接橘子切割吸盘的回程末端;所述第四限位器输出端连接控制器的输入端,第四限位器的输入端连接橘子切割切刀的回程末端;所述第五限位器输出端连接控制器的输入端,第五限位器的输入端连接橘肉橘皮分离推盘的进程末端;所述第六限位器输出端连接控制器的输入端,第六限位器的输入端连接橘肉橘皮分离推盘的回程末端。
28.所述plc控制器能够根据给定的角度值,通过算法计算得到相应各个电机的转角,进而可以得到需要给各个伺服电机输入的脉冲和脉冲频率;所述第一伺服驱动器、第二伺服驱动器、第三伺服驱动器、第四伺服驱动器接收到控制器所发出的脉冲信号,进而控制各个电机进行相应的运转;所述编码盘可以采集各个电机的转角信息,并将采集到的信息传
输给伺服驱动器,伺服驱动器通过将初始信息和反馈信息进行比较,进而调整相应电机的转角和转速;所述限位器可以收集到各个气缸的位置,然后反馈信号给控制器,控制器通过接收的信号,进行下一工序,从而使各个功能达到预想的效果。
29.本实用新型的工作过程如下:当橘皮进料装置的橘子进料红外线传感器感应到盛料旋转盛料盒旋转到指定位置的时候,反馈信号给控制器,然后控制器发送指令给第四伺服驱动器,然后第四伺服驱动器驱动橘子进料电机运转,橘子进料电机带动橘子进料三角挡板转动,使橘子放置到盛料旋转盛料盒中,然后盛料旋转盘进行旋转,使盛料旋转盛料盒到达下一个工位,与此同时,下一个盛料旋转盛料盒到达橘子进料装置指定位置。此时控制器向第一电磁控制阀、第二电磁控制阀发出指令,两控制阀控制两橘子切割第一气缸同时工作,两橘子切割第一气缸带动两个橘子切割吸盘夹紧橘子,同时控制器控制两橘子切割吸盘对橘子皮进行吸紧,当橘子切割吸盘运动到一定位置时,触发第一限位器,第一限位器反馈指令到控制器,控制器发出指令给第三电磁控制阀,第三电磁控制阀控制橘子切割第二气缸运动,使橘子切割切刀下降到指定位置,同时第二限位器发送反馈信号给控制器,控制器发送指令到第二伺服驱动器、第三伺服驱动器,这两个伺服驱动器发送指令给橘子切割电机,使得橘子切割电机带动橘子进行转动,完成切皮工序,然后控制器发送指令给第一电磁控制阀、第二电磁控制阀、第三电磁控制阀,前两个电磁控制阀控制橘子切割第一气缸进行回程,第三电磁控制阀控制橘子切割第二气缸进行回程,当橘子切割第一气缸回程到原点之后,触发第三限位器,第三限位器反馈信号给控制器,控制器控制橘子切割吸盘进行吹气,从而使得橘子皮脱落橘子切割吸盘,当橘子切割切刀回程到原点后,第四限位器反馈信号到控制器;当控制器接收到第三限位器和第四限位器的时候,控制器控制第一伺服驱动器发出指令,控制旋转第一电机带动盛料旋转盘进行转动,当橘子进料红外线传感器检测到盛料旋转盛料盒到达指定位置后,反馈信号给控制器,控制器做出反应,发出指令到第四电磁控制阀,第四电磁控制阀控制橘肉橘皮分离气缸进行运动,从而推动橘子到达橘子导向导管,使得果肉与果皮进行分离;当橘肉橘皮分离推盘到达指定位置之后,第五限位器反馈信号到控制器,控制器发送指令给第五电磁控制阀,进而控制橘肉橘皮分离气缸回程,当橘肉橘皮分离气缸回到原点时,第六限位器反馈信号到控制器,至此一个循环结束。
30.本实用新型的有益效果在于:本实用新型采用多个电机和气缸做为动力源,并利用多个不同种类的传感器测量各个工序完成的进程,形成反馈,使控制器能够有序的对各个电机和气缸进行控制,从而能够完成对每个橘子的剥皮功能,并将果皮和果肉分类进行收集;本实用新型具有结构简单,设计合理,加工装配工艺良好的优点。
附图说明
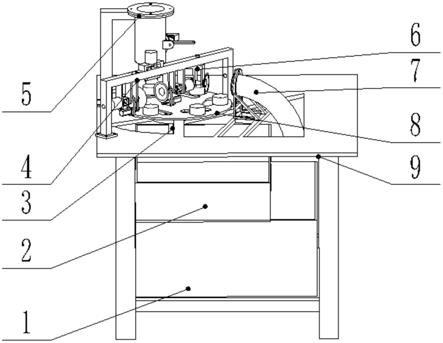
31.图1是本实用新型一种旋转式柑橘去皮机的整体结构示意图。
32.图2是本实用新型橘皮切割装置的结构示意图。
33.图3是本实用新型橘子进料装置的结构示意图。
34.图4是本实用新型橘肉橘皮分离装置的结构示意图。
35.图5是本实用新型橘肉导向装置的结构示意图。
36.图6是本实用新型盛料旋转装置的结构示意图。
37.图中,1
‑
橘肉收集装置、2
‑
橘皮收集装置、3
‑
旋转第一电机、4
‑
橘皮切割装置、5
‑
橘
子进料装置、6
‑
橘肉橘皮分离装置、7
‑
橘肉导向装置、8
‑
盛料旋转装置、9
‑
橘子剥皮支撑架、41
‑ꢀ
橘子切割第一支撑架、42
‑
橘子切割电机、43
‑
橘子切割第一气缸、44
‑
橘子切割内轴、45
‑
橘子切割连接架、46
‑
橘子切割外轴、47
‑
橘子切割电机固定架、48
‑
橘子切割第一同步轮、49
‑
橘子切割第二同步轮、410
‑
橘子切割同步带、411
‑
橘子切割吸盘、412
‑
橘子切割第二气缸、413
‑
橘子切割第二支撑架、414
‑
橘子切割切刀、51
‑
橘子进料支撑架、52
‑
橘子进料红外线传感器、53
‑ꢀ
橘子进料导管、54
‑
橘子进料电机、55
‑
橘子进料三角挡板、56
‑
橘子进料支撑轴、61
‑
橘肉橘皮分离支撑架、62
‑
橘肉橘皮分离连接架、63
‑
橘肉橘皮分离外轴、64
‑
橘肉橘皮分离内轴、66
‑ꢀ
橘肉橘皮分离推盘、67
‑
橘肉橘皮分离气缸、71
‑
橘肉导向导管支撑架、72
‑
橘肉导向导管、81
‑ꢀ
盛料旋转盛料盒、82
‑
盛料旋转挡圈、83
‑
盛料旋转轴、84
‑
盛料旋转轴承、85
‑
盛料旋转盘。
具体实施方式
38.下面结合附图对本实用新型作进一步说明:
39.如图1~6所示,一种旋转式柑橘去皮机,包括橘肉收集装置1、橘皮收集装置2、旋转第一电机3、橘皮切割装置4、橘子进料装置5、橘肉橘皮分离装置6、橘肉导向装置7、盛料旋转装置8和橘子剥皮支撑架9,所述橘子剥皮支撑架9上表面为水平平台,所述橘皮收集装置2安装在橘子剥皮支撑架9中部,橘肉收集装置1安装在橘子剥皮支撑架9下端,橘肉导向装置7的出口处连接橘肉收集装置1的入口;所述旋转第一电机3通过螺钉固定连接在橘子剥皮支撑架9的水平平台下方;所述盛料旋转装置8通过轴承支撑在橘子剥皮支撑架9 的水平平台上,旋转第一电机3的输出轴连接盛料旋转装置8并驱动盛料旋转装置8的转动;所述盛料旋转装置8上方设置有橘子进料工位、橘子切割工位和橘肉橘皮分离工位,盛料旋转装置8转动时盛料旋转装置8上用于盛放橘子的盛料旋转盛料盒81依次经过橘子进料工位、橘子切割工位和橘肉橘皮分离工位;所述橘子进料装置5固定在橘子剥皮支撑架9上且橘子进料装置5设置在橘子进料工位的上方;所述橘皮切割装置4固定在橘子剥皮支撑架9 上,橘皮切割装置4的切割部分位于橘子切割工位的侧面,所述橘肉橘皮分离装置6和橘肉导向装置7固定在橘肉橘皮分离工位两侧的橘子剥皮支撑架9上。橘肉收集装置1为封闭带出入口的盒体,橘皮收集装置2为上端开口的箱体。
40.所述橘皮切割装置4包括橘子切割第一支撑架41、橘子切割旋转夹具、橘子切割第二气缸412、橘子切割第二支撑架413和橘子切割切刀414,所述橘子切割第一支撑架41整体呈龙门架状,橘子切割第一支撑架41中部为水平横梁,橘子切割第一支撑架41的两端为竖直设置的脚架,两端脚架的下方设置有固定块,通过穿过固定块上螺栓孔的螺栓固定在橘子剥皮支撑架9上。橘子切割第一支撑架41横跨整个盛料旋转装置8且固定在橘子剥皮支撑架9 上,即橘子切割第一支撑架41的水平横梁位于盛料旋转装置8的上方且长度大于盛料旋转装置8的最大直径;橘子切割第二气缸412通过橘子切割第二支撑架413固定在橘子切割工位正上方的橘子切割第一支撑架41上,橘子切割第二气缸412通过螺栓固定在橘子切割第二支撑架413上,橘子切割第二支撑架413通过螺栓固定在橘子切割第一支撑架41上;橘子切割第二气缸412竖直朝下设置,橘子切割第二气缸412的输出端连接橘子切割切刀414,橘子切割第二气缸412工作时带动橘子切割切刀414在橘子切割工位上方做上下运动。
41.所述橘子切割切刀414包括水平设置的刀架和两块竖直设置的刀片,两块刀片设
置在刀架的两端底部,两块刀片均竖直朝下设置。两块刀片活动固定在刀架的两端,两块刀片之间的间距可调。刀片通过螺栓和条形槽配合的方式安装,通过调整螺栓在条形槽上的位置调节两块刀片之间的距离。
42.所述橘子切割旋转夹具设有左右对称的一对,两组橘子切割旋转夹具分别设置在橘子切割工位的两侧;橘子切割旋转夹具工作时分别夹紧橘子的两侧实现橘子整体的夹紧和旋转。所述橘子切割旋转夹具包括橘子切割电机42、橘子切割第一气缸43、橘子切割内轴44、橘子切割连接架45、橘子切割外轴46、橘子切割电机固定架47、橘子切割第一同步轮48、橘子切割第二同步轮49、橘子切割同步带410和橘子切割吸盘411,所述橘子切割第一支撑架41上设置有竖直设置的第一气缸连接架,橘子切割第一气缸43水平安装在第一气缸连接架上,橘子切割第一气缸43的输出端连接水平设置的橘子切割连接架45的一端,所述橘子切割连接架45的另一端连接锯子切割外轴的一端;所述橘子切割第一支撑架41上还设有两块竖直且平行于第一气缸连接架设置的外轴支撑板,橘子切割外轴46外部主干通过滚珠连接在两块外轴支撑板上,所述橘子切割电机固定架47固定在橘子切割外轴46的外部主干中部,橘子切割电机42水平固定在橘子切割电机固定架47上,橘子切割电机42的输出端连接橘子切割第一同步轮48;所述橘子切割内轴44套装在橘子切割外轴46内部且橘子切割内轴44 和橘子切割外轴46通过轴承连接,橘子切割内轴44的一端与橘子切割吸盘411固定连接,橘子切割内轴44靠近吸盘端通过螺钉固定橘子切割第二同步轮49,所述橘子切割第一同步轮48和橘子切割第二同步轮49通过橘子切割同步带410连接;所述切割第一气缸工作时驱动第一气缸连接架、橘子切割外轴46、橘子切割内轴44、橘子切割电机42和橘子切割吸盘 411组成的整体水平运动,所述橘子切割电机42工作时通过橘子切割第一同步轮48、锯子切割同步带和橘子切割第二同步轮49组成的同步带机构带动橘子切割内轴44和橘子切割吸盘 411组成的整体转动。
43.所述橘子进料装置5包括橘子进料支撑架51、橘子进料红外线传感器52、橘子进料导管 53、橘子进料电机54、橘子进料三角挡板55和橘子进料支撑轴56,橘子进料支撑架51呈l 型,所述橘子进料支撑架51的下端固定连接在橘子剥皮支撑架9上,橘子进料支撑架5的上端呈水平延伸状,且橘子进料导管53通过螺栓竖直固定在所述橘子进料支撑架51的水平延伸部位上,橘子进料导管53设置在橘子进料工位的正方上。橘子进料导管53的一侧设置直线槽,靠近该直线槽一侧的橘子进料导管53上固定所述橘子进料支撑架51,橘子进料导管 53上设置有橘子进料支撑轴56,所述橘子进料支撑轴56中部与橘子进料三角挡板55固定连接,橘子进料三角挡板55设置有三根沿着周向均匀分布的橘子进料挡板,橘子进料电机54 固定在橘子进料支撑架51上,橘子进料电机54的输出轴连接橘子进料支撑轴56的一端,橘子进料电机54工作时通过橘子进料支撑轴56驱动橘子进料三角挡板55进行转动,橘子进料三角挡板55的三根橘子进料挡板绕着橘子进料支撑轴56旋转时依次从橘子进料导管53经过实现橘子进料导管53中的橘子依次进入下方的橘子进料工位中;所述橘子进料红外线传感器 52固定连接在橘子进料支撑架51的下方,橘子进料红外线传感器52正对橘子进料工位。整个橘子进料装置5前置工位连接的是橘子进料仓,可以设置底部倾斜的橘子进料仓实现橘子的单个进料,也可以直接设置管状的进料管道实现橘子的单个上料。
44.所述橘肉橘皮分离装置6包括橘肉橘皮分离支撑架61、橘肉橘皮分离连接架62、橘肉橘皮分离外轴63、橘肉橘皮分离内轴64、橘肉橘皮分离推盘66和橘肉橘皮分离气缸67;所
述橘肉橘皮分离支撑架61上端通过螺栓固定连接在橘皮切割装置4的橘子切割第一支撑架41 上,即橘子切割第一支撑架41不仅承担固定橘子切割旋转夹具的作用,也承担固定橘肉橘皮分离装置6的作用。橘肉橘皮分离气缸67水平安装在橘肉橘皮分离支撑架61的下端;所述橘肉橘皮分离气缸67输出端连接橘肉橘皮分离连接架62的一端;所述橘肉橘皮分离连接架 62的另一端与橘肉橘皮分离外轴63的一端固定连接;橘肉橘皮分离外轴63的外部主干穿过橘肉橘皮分离支撑架61上的两个光孔,所述橘肉橘皮分离内轴64套装在橘肉橘皮分离外轴 63内部,橘肉橘皮分离外轴63与橘肉橘皮分离内轴64通过轴承连接,橘肉橘皮分离内轴64 远离橘肉橘皮分离气缸67的一端与橘肉橘皮分离推盘66固定连接;所述橘肉橘皮分离气缸 67工作时驱动橘肉橘皮分离连接架62、橘肉橘皮分离外轴63、橘肉橘皮分离内轴64和橘肉橘皮分离推盘66组成的整体水平运动。
45.所述橘肉导向装置7包括橘子导向导管支撑架71和橘子导向导管72,所述橘子导向导管支撑架71底端通过螺栓固定连接在橘子剥皮支撑架9上,橘子导向导管72固定安装在橘子导向导管支撑架71的上端;所述橘子导向导管72整体呈弧形管设置,橘子导向导管72的入口口径大于橘肉橘皮分离装置6的橘肉橘皮分离推盘66外径,橘子导向导管72的入口的轴心线和橘肉橘皮分离推盘66的轴心线在同一条直线的,橘肉橘皮分离推盘66在橘肉橘皮分离气缸67的推动下将橘肉橘皮分离工位中的橘子推入橘子导向导管72的入口中。橘子导向导管72的口径设计要保证橘皮不能进入橘子导向导管72中但是橘肉可以进入橘子导向导管72中。
46.所述盛料旋转装置8包括盛料旋转盛料盒81、盛料旋转挡圈82、盛料旋转轴83、盛料旋转轴承84和盛料旋转盘85,所述盛料旋转挡圈82固定连接在橘子剥皮支撑架9上,盛料旋转盘85的底部中心位置连接盛料旋转轴83,所述盛料旋转轴83通过盛料旋转轴承84与盛料旋转挡圈82连接;所述盛料旋转盘85的上表面上设置有沿周向均匀布置的至少三个盛料旋转盛料盒81。旋转第一电机3通过盛料旋转轴83带动盛料旋转盘85转动时盛料旋转盘 85上的盛料旋转盛料盒81依次经过橘子进料工位、橘子切割工位和橘肉橘皮分离工位。盛料旋转盛料盒81靠近盛料旋转盘85的边缘设置,盛料旋转盘85位于盛料旋转盛料盒81内侧的位置设有镂空通孔,方便橘皮从盛料旋转盘85两侧落下进入橘皮收集装置2中。
47.所述橘子剥皮支撑架9下方设置有两条平行且水平设置的第一导轨,两条第一导轨分布在剥皮机支撑架下方内部左右两侧,第一滑块套装在两条第一导轨上,橘肉收集装置1固定在第一滑块上。所述橘子剥皮支撑架9中部设置有两条平行且水平设置的第二导轨,两条第二导轨分布在剥皮机支撑架内部中间左右两侧,第二滑块套装在两条第二导轨上,橘皮收集装置2固定在第二滑块上。
48.所述旋转第一电机3通过电机架固定在橘子剥皮支撑架9上,旋转第一电机3和电机架之间设有相互配合的螺纹孔,电机架和橘子剥皮支撑架9之间设置有相互配合的螺纹孔。
49.所述橘子剥皮支撑架9的水平平台上和盛料旋转盘85上均设置有镂空通孔,橘皮收集装置2上端开口且设置在盛料旋转盘85正下方。
50.固定橘皮切割装置4的位置应避免与盛料旋转装置8之间发生干涉,所以采用龙门架形状的橘子切割第一支撑架41来固定两组橘子切割旋转夹具,使其位于盛料旋转装置8上方橘子切割工位的左右两侧。
51.所述橘子切割切刀414与相应的盛料旋转装置上的盛料旋转盛料盒相对齐,以便橘子切割切刀414能够均匀的切割原料两边。
52.所述橘子切割外轴46内部装有轴承,橘子切割外轴46与橘子切割内轴44之间通过轴承进行连接,并且在橘子切割内轴44的轴承左右两端装有用于限位的挡圈。
53.所述橘皮切割装置4的橘子切割旋转夹具设置有左右对称的一对,相对的橘子切割吸盘 411也有两个,两个橘子切割吸盘411成左右对称分布,两个橘子切割吸盘411需对齐,两个橘子切割吸盘411的轴心线在同一条直线上,以确保能够夹紧原料。所述橘子切割第一同步轮48和橘子切割第二同步轮49上下位置保持对齐,以便橘子切割电机42能够通过橘子切割同步带410带动橘子切割吸盘411进行转动。
54.所述橘子进料红外线传感器52正对橘子进料工位,以便能够感应到盛料旋转盛料盒81,当盛料旋转盛料盒81到达指定位置时,橘子进料装置5能够放置原料进入盛料旋转盛料盒 81中。
55.本实用新型的控制系统包括plc控制器、四个伺服驱动器、四个伺服电机、四个编码盘、四个伸缩气缸、四个电磁控制阀和六个限位器;四个伺服驱动器分别为第一伺服驱动器、第二伺服驱动器、第三伺服驱动器和第四伺服驱动器;四个编码盘分别为第一编码盘、第二编码盘、第三编码盘和第四编码盘;四个电磁控制阀分别为第一电磁控制阀、第二电磁控制阀、第三电磁控制阀和第四电磁控制阀;六个限位器分别为第一限位器、第二限位器、第三限位器、第四限位器、第五限位器和第六限位器;所述plc控制器的输出端分别与第一伺服驱动器、第二伺服驱动器、第三伺服驱动器、第四伺服驱动器、第一电磁控制阀、第二电磁控制阀、第三电磁控制阀、第四电磁控制阀的输入端并联连接;所述第一伺服驱动器的输出端与旋转第一电机的信号输入端进行连接;所述第一编码盘的一端与旋转第一电机的输出轴相连接,第一编码盘的另一端与第一伺服驱动器连接;所述第二伺服驱动器的输出端与橘子切割电机的信号输入端进行连接;所述第二编码盘的一端与橘子切割电机的输出轴相连接,第二编码盘的另一端与第二伺服驱动器连接;所述第三伺服驱动器的输出端与橘子切割电机的信号输入端进行连接;所述第三编码盘的一端与橘子切割电机的输出轴相连接,第三编码盘的另一端与第三伺服驱动器连接;所述第四伺服驱动器的输出端与橘子进料电机的信号输入端进行连接;所述第四编码盘的一端与橘子进料电机的输出轴相连接,第四编码盘的另一端与第四伺服驱动器连接;所述第一电磁控制阀的输出端与橘子切割第一气缸的输入端连接;所述第二电磁控制阀的输出端与橘子切割第一气缸的输入端连接;所述第三电磁控制阀的输出端与橘子切割第二气缸的输入端连接;所述第四电磁控制阀的输出端与橘肉橘皮分离气缸的输入端连接;所述第一限位器输出端连接控制器的输入端,第一限位器的输入端连接橘子切割吸盘的进程末端;所述第二限位器输出端连接控制器的输入端,第二限位器的输入端连接橘子切割切刀的进程末端;所述第三限位器输出端连接控制器的输入端,第三限位器的输入端连接橘子切割吸盘的回程末端;所述第四限位器输出端连接控制器的输入端,第四限位器的输入端连接橘子切割切刀的回程末端;所述第五限位器输出端连接控制器的输入端,第五限位器的输入端连接橘肉橘皮分离推盘的进程末端;所述第六限位器输出端连接控制器的输入端,第六限位器的输入端连接橘肉橘皮分离推盘的回程末端。
56.所述plc控制器能够根据给定的角度值,通过算法计算得到相应各个电机的转角,
进而可以得到需要给各个伺服电机输入的脉冲和脉冲频率;所述第一伺服驱动器、第二伺服驱动器、第三伺服驱动器、第四伺服驱动器接收到控制器所发出的脉冲信号,进而控制各个电机进行相应的运转;所述编码盘可以采集各个电机的转角信息,并将采集到的信息传输给伺服驱动器,伺服驱动器通过将初始信息和反馈信息进行比较,进而调整相应电机的转角和转速;所述限位器可以收集到各个气缸的位置,然后反馈信号给控制器,控制器通过接收的信号,进行下一工序,从而使各个功能达到预想的效果。
57.本实用新型的工作过程如下:当橘子进料装置5的橘子进料红外线传感器52感应到盛料旋转盛料盒81旋转到指定位置的时候,反馈信号给控制器,然后控制器发送指令给第四伺服驱动器,然后第四伺服驱动器驱动橘子进料电机54运转,橘子进料电机54带动橘子进料三角挡板55转动,使橘子放置到盛料旋转盛料盒81中,然后盛料旋转盘85进行旋转,使盛料旋转盛料盒81到达下一个工位,与此同时,下一个盛料旋转盛料盒81到达橘子进料装置5 指定位置。此时控制器向第一电磁控制阀、第二电磁控制阀发出指令,两控制阀控制两橘子切割第一气缸43同时工作,两个橘子切割第一气缸43带动两个橘子切割吸盘411夹紧橘子,同时控制器控制两个橘子切割吸盘411对橘子皮进行吸紧,当橘子切割吸盘411运动到一定位置时,触发第一限位器,第一限位器反馈指令到控制器,控制器发出指令给第三电磁控制阀,第三电磁控制阀控制橘子切割第二气缸412运动,使橘子切割切刀414下降到指定位置,同时第二限位器发送反馈信号给控制器,控制器发送指令到第二伺服驱动器、第三伺服驱动器,这两个伺服驱动器发送指令给橘子切割电机42,使得橘子切割电机42带动橘子进行转动,完成切皮工序,然后控制器发送指令给第一电磁控制阀、第二电磁控制阀、第三电磁控制阀,前两个电磁控制阀控制橘子切割第一气缸43进行回程,第三电磁控制阀控制橘子切割第二气缸412进行回程,当橘子切割第一气缸43回程到原点之后,触发第三限位器,第三限位器反馈信号给控制器,控制器控制橘子切割吸盘411进行吹气,从而使得橘子皮脱落橘子切割吸盘43,当橘子切割切刀414回程到原点后,第四限位器反馈信号到控制器;当控制器接收到第三限位器和第四限位器的时候,控制器控制第一伺服驱动器发出指令,控制旋转第一电机3带动盛料旋转盘85进行转动,当橘子进料红外线传感器52检测到盛料旋转盛料盒 81到达指定位置后,反馈信号给控制器,控制器做出反应,发出指令到第四电磁控制阀,第四电磁控制阀控制橘肉橘皮分离气缸67进行运动,从而推动橘子到达橘子导向导管72,由于橘子导向导管72的尺寸限制,橘皮无法进入橘子导向导管72中,仅橘肉可以在橘肉橘皮分离气缸67的推动下进入橘子导向导管72中,使得果肉与果皮进行分离;当橘肉橘皮分离推盘66到达指定位置之后,第五限位器反馈信号到控制器,控制器发送指令给第五电磁控制阀,进而控制橘肉橘皮分离气缸67回程,当橘肉橘皮分离气缸67回到原点时,第六限位器反馈信号到控制器,至此一个循环结束。
58.上述实施例只是本实用新型的较佳实施例,并不是对本实用新型技术方案的限制,只要是不经过创造性劳动即可在上述实施例的基础上实现的技术方案,均应视为落入本实用新型专利的权利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1