四轴桁架机械手的制作方法
1.本发明属于机械手技术领域,尤其涉及一种四轴桁架机械手。
背景技术:
2.加工大型壳体类工件时,需要用桁架进行吊运。由于工件体积较大,在上下吊运时,工件与桁架的横梁会发生干涉,导致吊运工作不能顺利的进行。如果依靠人工辅助吊运,还存在一定的安全隐患。同时,工件重量也较重,存在重心偏移,轨道的侧向受到的压力较大,长此以往,桁架容易发生磨损和疲劳,影响桁架的使用寿命。
技术实现要素:
3.有鉴于此,有必要提供一种防止工件与桁架发生干涉的四轴桁架机械手。
4.一种四轴桁架机械手包括x轴横梁、x轴移动支座、y轴移动支座、z轴移动双竖梁,所述x轴横梁与x轴移动支座连接,x轴移动支座能够在x轴移动支座上沿着x轴方向移动,x轴移动支座与y轴移动支座连接,y轴移动支座能够在x轴移动支座上沿着y轴方向移动,z轴移动双竖梁与y轴移动支座连接,z轴移动双竖梁能够在y轴移动支座上沿着z轴方向移动;所述x轴横梁上设有x轴齿轨,x轴移动支座上设有第一驱动机构,第一驱动机构与x轴齿轨啮合连接,以带动x轴移动支座沿着x轴方向移动,x轴移动支座的底部设有第二驱动机构,对应的,y轴移动支座的底部设有螺纹孔,第二驱动机构与螺纹孔螺纹连接,以带动y轴移动支座沿着y轴方向移动,所述y轴移动支座的两侧还设有第三驱动机构,相应的,z轴移动双竖梁设有z轴齿轨,第三驱动机构与z轴齿轨啮合连接,以带动z轴双竖梁沿着z轴方向移动;所述x轴移动支座的上端和下端分别设有一个x轴限位机构,以减小x轴移动支座在移动过程中受到的摩擦力,所述x轴限位机构包括若干水平限位轮、若干竖直限位轮,对应的,x轴横梁设有两个限位杆,所述两个限位杆位于x轴横梁的上表面和底部,限位杆的两侧与水平限位轮接触,x轴限位横梁的上表面的限位杆的上端与竖直限位轮的底部接触,x轴限位横梁的上表面的限位杆的上端与竖直限位轮的顶部接触,所述x轴限位机构还包括若干卡板,卡板与x轴移动支座固定连接,卡板上设有卡槽,卡槽与限位杆卡接。
5.优选的,所述第一驱动机构包括第一驱动电机、第一驱动齿轮,所述第一驱动电机与x轴移动支座固定连接,第一驱动电机的下端为驱动轴,第一驱动电机的驱动轴与第一驱动齿轮固定连接,以带动第一驱动齿轮转动,第一驱动齿轮与x轴齿轨啮合连接。
6.优选的,所述第二驱动机构包括第二驱动电机、驱动丝杆,所述第二驱动电机的机身与x轴移动支座的底部固定连接,第二驱动电机的转轴与驱动丝杆固定连接,所述y轴移动支座的底部设有水平横杆,水平横杆与驱动丝杆相垂直,水平横杆的中端设有螺纹孔座,螺纹孔位于螺纹孔座中,驱动丝杆与螺纹孔螺纹连接。
7.优选的,所述第三驱动机构包括两个第三驱动电机、两个第三驱动齿轮,所述第三驱动电机的机身位于y轴移动支座的两侧且与y轴移动支座固定连接,第三驱动电机的转轴
与第三驱动齿轮固定连接,以带动第三驱动齿轮转动,第三驱动齿轮与z轴齿轨啮合连接。
8.优选的,所述四轴桁架机械手还包括y轴限位机构,以增加y轴移动支座在移动过程中的稳定性,所述y轴限位机构包括四个几字形限位槽,四个几字形限位槽分别位于y轴移动支座的上端的两侧以及y轴移动支座的下端的两侧,对应的,所述x轴移动支座的上端的两侧以及x轴移动支座的下端的两侧分别设有两个几字形限位轨道,几字形限位轨道和几字形限位槽卡合连接。
9.优选的,所述四轴桁架机械手还包括z轴限位机构,以增加z轴移动双竖梁在移动过程中的稳定性,所述z轴限位机构包括四个工字形限位轨道,z轴移动双竖梁的两侧分别设有两个工字形限位轨道,对应的,所述y轴移动支座的两侧分别设有两个工字形限位槽,工字形限位槽和工字形限位轨道卡合连接。
10.优选的,所述x轴移动支座包括上水平支撑板、第一电机支座、滚轮限位座、信号线集成座、连接板、下水平支撑板,所述上水平支撑板与第一电机支座、滚轮限位座、信号线集成座固定连接,第一电机支座位于上水平支撑板的中部,第一电机支座与第一驱动电机固定连接,滚轮限位座与水平限位轮、两个竖直限位轮、卡板连接,信号线集成座位于水平支撑板的正上方,所述连接板的上端与上水平支撑板固定连接,连接板的下端与下水平支撑板固定连接,下水平支撑板与第二驱动机构固定连接,所述几字形限位轨道分别位于上水平支撑板和下水平支撑板的两侧。
11.优选的,所述y轴移动支座包括两个竖向支座、两个水平横杆,所述两个竖向支座平行设置,两个水平横杆平行设置,竖向支座的上端和下端分别与一个水平横杆固定连接,所述第三驱动电机与竖向支座固定连接,所述工字形限位槽设置在竖直支座上。
12.有益效果:本发明的四轴桁架机械手通过设置y轴移动支座,能够带动z轴移动双竖梁沿着y轴方向移动,z轴移动双竖梁底部固定有抓取工件的机械手,工件沿着y轴方向移动,就能够有效避开x轴横梁,从而能够避免工件在起吊过程中与x轴横梁发生干涉。同时,通过设置x轴限位机构,能够使x轴移动支座沿着x轴方向稳定移动,不会出现因重心偏移造成的打滑问题,x轴桁架受到的侧向力更加稳定,在水平限位轮、和竖直限位轮的作用下,限位杆受到的摩擦力显著减小,从而受到的磨损也会明显下降。同时,限位杆承担部分x轴移动支座带来的侧向力,使得x轴齿轨受到的侧向压力明显降低,x轴齿轨的磨损以及产生的金属疲劳明显下降,有助于延长x轴齿轨以及第一驱动机构的寿命。
附图说明
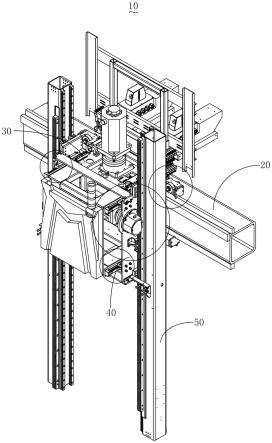
13.图1为本发明的四轴桁架机械手的结构示意图。
14.图2~4为图1的局部结构示意图。
15.图5为本发明的四轴桁架机械手的截面图。
16.图6为图5的局部结构示意图。
17.图7~图9为本发明的四轴桁架机械手的局部结构示意图。
18.图中:四轴桁架机械手10、x轴横梁20、限位杆201、x轴移动支座30、第一驱动机构301、第一驱动电机3011、第一驱动齿轮3012、第二驱动机构302、第二驱动电机3021、驱动丝杆3022、x轴限位机构303、水平限位轮3031、竖直限位轮3032、卡板3033、上水平支撑板304、第一电机支座305、滚轮限位座306、信号线集成座307、连接板308、下水平支撑板309、y轴移
动支座40、第三驱动机构401、第三驱动电机4011、第三驱动齿轮4012、水平横杆402、螺纹孔座4021、几字形限位槽403、工字形限位轨槽404、竖向支座405、z轴移动双竖梁50。
具体实施方式
19.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
20.请参看图1至图9,一种四轴桁架机械手10包括x轴横梁20、x轴移动支座30、y轴移动支座40、z轴移动双竖梁50,所述x轴横梁20与x轴移动支座30连接,x轴移动支座30能够在x轴移动支座30上沿着x轴方向移动,x轴移动支座30与y轴移动支座40连接,y轴移动支座40能够在x轴移动支座30上沿着y轴方向移动,z轴移动双竖梁50与y轴移动支座40连接,z轴移动双竖梁50能够在y轴移动支座40上沿着z轴方向移动;所述x轴横梁20上设有x轴齿轨,x轴移动支座30上设有第一驱动机构301,第一驱动机构301与x轴齿轨啮合连接,以带动x轴移动支座30沿着x轴方向移动,x轴移动支座30的底部设有第二驱动机构302,对应的,y轴移动支座40的底部设有螺纹孔,第二驱动机构302与螺纹孔螺纹连接,以带动y轴移动支座40沿着y轴方向移动,所述y轴移动支座40的两侧还设有第三驱动机构401,相应的,z轴移动双竖梁50设有z轴齿轨,第三驱动机构401与z轴齿轨啮合连接,以带动z轴双竖梁沿着z轴方向移动;所述x轴移动支座30的上端和下端分别设有一个x轴限位机构303,以减小x轴移动支座30在移动过程中受到的摩擦力,所述x轴限位机构303包括若干水平限位轮3031、若干竖直限位轮3032,对应的,x轴横梁20设有两个限位杆201,所述两个限位杆201位于x轴横梁20的上表面和底部,限位杆201的两侧与水平限位轮3031接触,x轴限位横梁的上表面的限位杆201的上端与竖直限位轮3032的底部接触,x轴限位横梁的上表面的限位杆201的上端与竖直限位轮3032的顶部接触,所述x轴限位机构303还包括若干卡板3033,卡板3033与x轴移动支座30固定连接,卡板3033上设有卡槽,卡槽与限位杆201卡接。
21.现有技术中的桁架在吊运工件时,只能使工件沿着x轴方向或z轴方向移动,大型壳体类工件体积较大,重量也较重,在起吊过程中容易与x轴横梁20发生干涉。通过在x轴移动支座30上设置y轴移动支座40,使得工件在吊运过程中能够沿着y轴方向移动,从而能够避免工件与x轴横梁20发生干涉。在设置y轴移动支座40后,当工件沿着y轴方向移动时,装置整体的重心将逐渐从x轴横梁20的正下方移向y轴方向。这种情况下,x轴横梁20除了受到向下的力,还受到y轴方向的侧向力。侧向力的作用会增大x轴横梁20与x轴移动支座30之间的摩擦力,长此以往,x轴横梁20和x轴移动支座30都会出现较大的磨损,尤其设置齿轨和齿轨的桁架,当磨损较大时,x轴移动的精度会受到很大影响,当齿轮位于齿轨的上方时,甚至可能出现脱轨的情况。通过设置x轴限位机构303和限位杆201,能够防止x轴移动支座30发生侧滑甚至脱轨,同时水平限位轮3031、竖直限位轮3032与限位杆201之间发生的是滚动摩擦,从而能够有效减小磨损问题。并且x轴限位机构和限位杆201能够起到很好地支撑作用,从而减小了齿轮与齿条之间的受力,减小了齿轮与齿条的磨损,增加了齿轮和齿条的寿命,行走精度也更高。同时,第一驱动电机3011做功也更少,降低了能耗。在实际运行过程中,水平限位轮3031、竖直限位轮3032与限位杆201可能存在配合间隙,通过卡槽的作用,能
够修复因存在配合间隙导致地晃动问题,使x轴移动支座30的运行轨迹更加平稳。
22.在一较佳实施方式中,水平限位轮3031设有八个,其中,四个水平限位轮3031位于x轴移动支架的上端,剩下四个水平限位轮3031位于x轴移动支架的下端,上端的四个水平限位轮3031在限位杆201的两侧分别设置两个。竖直限位轮3032设有四个,其中两个竖直限位轮3032位于x轴移动支架的上端,剩下两个竖直限位轮3032位于x轴移动支架的下端。
23.在一较佳实施方式中,所述第一驱动机构301包括第一驱动电机3011、第一驱动齿轮3012,所述第一驱动电机3011与x轴移动支座30固定连接,第一驱动电机3011的下端为驱动轴,第一驱动电机3011的驱动轴与第一驱动齿轮3012固定连接,以带动第一驱动齿轮3012转动,第一驱动齿轮3012与x轴齿轨啮合连接。
24.在一较佳实施方式中,所述第二驱动机构302包括第二驱动电机3021、驱动丝杆3022,所述第二驱动电机3021的机身与x轴移动支座30的底部固定连接,第二驱动电机3021的转轴与驱动丝杆3022固定连接,所述y轴移动支座40的底部设有水平横杆402,水平横杆402与驱动丝杆3022相垂直,水平横杆402的中端设有螺纹孔座4021,螺纹孔位于螺纹孔座4021中,驱动丝杆3022与螺纹孔螺纹连接。
25.在一较佳实施方式中,所述第三驱动机构401包括两个第三驱动电机4011、两个第三驱动齿轮4012,所述第三驱动电机4011的机身位于y轴移动支座40的两侧且与y轴移动支座40固定连接,第三驱动电机4011的转轴与第三驱动齿轮4012固定连接,以带动第三驱动齿轮4012转动,第三驱动齿轮4012与z轴齿轨啮合连接。
26.两个第三驱动电机4011独立运行,其中一个第三驱动电机4011控制一个z轴移动竖梁的上升,另一个第三驱动电机4011控制一个z轴移动竖梁的下降。
27.进一步的,所述四轴桁架机械手10还包括y轴限位机构,以增加y轴移动支座40在移动过程中的稳定性,所述y轴限位机构包括四个几字形限位槽403,四个几字形限位槽403分别位于y轴移动支座40的上端的两侧以及y轴移动支座40的下端的两侧,对应的,所述x轴移动支座30的上端的两侧以及x轴移动支座30的下端的两侧分别设有两个几字形限位轨道,几字形限位轨道和几字形限位槽403卡合连接。
28.通过几字形限位槽403和几字形限位轨道的配合,y轴移动支座40被紧密地卡在x轴移动支座30上,能够稳定地沿着y轴方向移动,有效抑制了y轴移动支座40移动过程中发生的抖动,增强了移动过程中的稳定性。
29.进一步的,所述四轴桁架机械手10还包括z轴限位机构,以增加z轴移动双竖梁50在移动过程中的稳定性,所述z轴限位机构包括四个工字形限位轨道,z轴移动双竖梁50的两侧分别设有两个工字形限位轨道,对应的,所述y轴移动支座40的两侧分别设有两个工字形限位槽,工字形限位槽和工字形限位轨道卡合连接。
30.通过工字形限位轨道与工字形限位槽的配合,z轴移动双竖梁50能够被紧密地卡在y轴移动支座40上,从而稳定地沿着z轴方向移动,有效抑制了z轴移动双竖梁50在移动郭恒中发生的抖动。
31.在一较佳实施方式中,所述x轴移动支座30包括上水平支撑板304、第一电机支座305、滚轮限位座306、信号线集成座307、连接板308、下水平支撑板309,所述上水平支撑板304与第一电机支座305、滚轮限位座306、信号线集成座307固定连接,第一电机支座305位于上水平支撑板304的中部,第一电机支座305与第一驱动电机3011固定连接,滚轮限位座
306与水平限位轮3031、两个竖直限位轮3032、卡板3033连接,信号线集成座307位于水平支撑板的正上方,所述连接板308的上端与上水平支撑板304固定连接,连接板308的下端与下水平支撑板309固定连接,下水平支撑板309与第二驱动机构302固定连接,所述几字形限位轨道分别位于上水平支撑板304和下水平支撑板309的两侧。
32.进一步的,所述y轴移动支座40包括两个竖向支座405、两个水平横杆402,所述两个竖向支座405平行设置,两个水平横杆402平行设置,竖向支座405的上端和下端分别与一个水平横杆402固定连接,所述第三驱动电机4011与竖向支座405固定连接,所述工字形限位槽设置在竖直支座上。
33.以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1