一种直线电机自适应智能控制方法、系统及存储介质与流程
本技术涉及电机智能控制领域的智能工程领域,具体而言,涉及一种直线电机自适应智能控制方法、系统及存储介质。
背景技术:
1、多轴机械手多用于机器臂,多轴机械手所使用的直线电机是为多轴机械手提供驱动力的动能驱动装置,目前现有多轴机械手的直线电机大都是根据控制器信号中枢系统输出指令操控输出力矩和转速以控制多轴机械手的输出扭矩、作动行程、速度和加速度,而不具备可根据多轴机械手操作姿态、驱动力、载重以及负载变化进行自适应智能调控的功能。
2、针对上述问题,目前亟待有效的技术解决方案。
技术实现思路
1、本技术实施例的目的在于提供一种直线电机自适应智能控制方法、系统及存储介质,可以根据电机功率干扰因子结合电机功率负载激励数据在电机扰动自适应模型中获得电机输出功效数据对电机进行自适应智能化控制。
2、本技术实施例还提供了一种直线电机自适应智能控制方法,包括以下步骤:
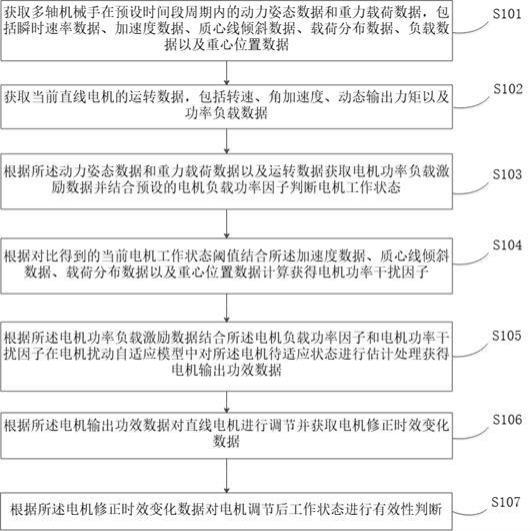
3、获取多轴机械手在预设时间段周期内的动力姿态数据和重力载荷数据,包括瞬时速率数据、加速度数据、质心线倾斜数据、载荷分布数据、负载数据以及重心位置数据;
4、获取当前直线电机的运转数据,包括转速、角加速度、动态输出力矩以及功率负载数据;
5、根据所述动力姿态数据和重力载荷数据以及运转数据获取电机功率负载激励数据并结合预设的电机负载功率因子判断电机工作状态;
6、根据对比得到的当前电机工作状态阈值结合所述加速度数据、质心线倾斜数据、载荷分布数据以及重心位置数据计算获得电机功率干扰因子;
7、根据所述电机功率负载激励数据结合所述电机负载功率因子和电机功率干扰因子在电机扰动自适应模型中对所述电机待适应状态进行估计处理获得电机输出功效数据;
8、根据所述电机输出功效数据对直线电机进行调节并获取电机修正时效变化数据;
9、根据所述电机修正时效变化数据对电机调节后工作状态进行有效性判断。
10、可选地,在本技术实施例所述的直线电机自适应智能控制方法中,所述获取多轴机械手在预设时间段周期内的动力姿态数据和重力载荷数据,包括瞬时速率数据、加速度数据、质心线倾斜数据、载荷分布数据、负载数据以及重心位置数据,包括:
11、获取多轴机械手直线电机功率调变周期;
12、根据所述功率调变周期采集所述多轴机械手在预设时间段内的动态参数集,包括重量参数、载重参数、惯性参数、速度参数、角度姿态参数以及重力分布参数;
13、根据所述载重参数、惯性参数、速度参数、角度姿态参数获得所述预设时间段周期内的动力姿态数据,包括瞬时速率数据、加速度数据、质心线倾斜数据;
14、根据所述重量参数、载重参数、重力分布参数获得所述预设时间段周期内的重力载荷数据,包括载荷分布数据、负载数据以及重心位置数据。
15、可选地,在本技术实施例所述的直线电机自适应智能控制方法中,所述根据所述动力姿态数据和重力载荷数据以及运转数据获取电机功率负载激励数据并结合预设的电机负载功率因子判断电机工作状态,包括:
16、根据获得的直线电机在所述预设时间段周期内的所述加速度数据、质心线倾斜数据、负载数据、重心位置数据以及所述角加速度、动态输出力矩计算获取电机功率负载激励数据;
17、根据所述直线电机的配置属性信息获得预设的电机负载功率因子,所述电机负载功率因子包括电机负载响应因子和电机功率响应因子;
18、根据所述电机功率负载激励数据结合所述电机负载功率因子获得电机运转负荷数据;
19、根据所述电机运转负荷数据与电机运转负荷阈值进行阈值对比;
20、根据阈值对比结果判断电机工作状态;
21、其中,所述电机功率负载激励数据的程序计算公式为:
22、;
23、所述电机运转负荷数据的计算公式为:
24、;
25、其中,w为电机功率负载激励数据,s为加速度数据,l为质心线倾斜数据,h为负载数据、j为重心位置数据,为角加速度,为动态输出力矩,、、、、、为电机功率约束系数;r为电机运转负荷数据,v为电机负载响应因子,p为电机功率响应因子。
26、可选地,在本技术实施例所述的直线电机自适应智能控制方法中,所述根据对比得到的当前电机工作状态阈值结合所述加速度数据、质心线倾斜数据、载荷分布数据以及重心位置数据计算获得电机功率干扰因子,包括:
27、根据电机工作状态的所述阈值对比结果结合所述加速度数据、质心线倾斜数据、载荷分布数据以及重心位置数据计算获得电机功率干扰因子;
28、所述电机功率干扰因子的计算程序为:
29、;
30、其中,n为电机功率干扰因子,为阈值对比结果,s为加速度数据,l为质心线倾斜数据,h为负载数据、j为重心位置数据,、、、为电机功率约束系数。
31、可选地,在本技术实施例所述的直线电机自适应智能控制方法中,所述根据所述电机功率负载激励数据结合所述电机负载功率因子和电机功率干扰因子在电机扰动自适应模型中对所述电机待适应状态进行估计处理获得电机输出功效数据,包括:
32、根据多轴机械手类型信息和所述直线电机的配置属性信息在多轴机械手智慧管理系统中查询获得对应的电机扰动自适应模型;
33、所述电机扰动自适应模型根据对应所述多轴机械手类型以及直线电机属性历史采集的电机扰动数据集进行训练处理获取;
34、所述电机扰动数据集包括历史采集获得的样本电机功率负载激励数据、样本电机负载功率因子、样本电机功率干扰因子以及样本电机输出功效数据;
35、根据获得的所述电机功率负载激励数据结合所述电机负载功率因子和电机功率干扰因子在所述电机扰动自适应模型中进行估计处理获得电机输出功效数据。
36、可选地,在本技术实施例所述的直线电机自适应智能控制方法中,所述根据所述电机输出功效数据对直线电机进行调节并获取电机修正时效变化数据,包括:
37、根据得到的所述电机输出功效数据调节直线电机的输出功率;
38、采集调节后电机在时间段周期内的第二电机运转负荷数据;
39、根据所述第二电机运转负荷数据与调节前所述电机运转负荷数据进行差异对比获得差异数据;
40、根据所述差异数据作为电机修正时效变化数据。
41、可选地,在本技术实施例所述的直线电机自适应智能控制方法中,所述根据所述电机修正时效变化数据对电机调节后工作状态进行有效性判断,包括:
42、根据所述电机负载功率因子设置电机修正效率阈值;
43、根据所述电机修正时效变化数据与所述电机修正效率阈值进行阈值对比;
44、若所述电机修正时效变化数据大于所述电机修正效率阈值,则电机调节功效有效性为有效,反之,则电机调节功效失效。
45、第二方面,本技术实施例提供了一种直线电机自适应智能控制系统,该系统包括:存储器及处理器,所述存储器中包括直线电机自适应智能控制方法的程序,所述直线电机自适应智能控制方法的程序被所述处理器执行时实现以下步骤:
46、获取多轴机械手在预设时间段周期内的动力姿态数据和重力载荷数据,包括瞬时速率数据、加速度数据、质心线倾斜数据、载荷分布数据、负载数据以及重心位置数据;
47、获取当前直线电机的运转数据,包括转速、角加速度、动态输出力矩以及功率负载数据;
48、根据所述动力姿态数据和重力载荷数据以及运转数据获取电机功率负载激励数据并结合预设的电机负载功率因子判断电机工作状态;
49、根据对比得到的当前电机工作状态阈值结合所述加速度数据、质心线倾斜数据、载荷分布数据以及重心位置数据计算获得电机功率干扰因子;
50、根据所述电机功率负载激励数据结合所述电机负载功率因子和电机功率干扰因子在电机扰动自适应模型中对所述电机待适应状态进行估计处理获得电机输出功效数据;
51、根据所述电机输出功效数据对直线电机进行调节并获取电机修正时效变化数据;
52、根据所述电机修正时效变化数据对电机调节后工作状态进行有效性判断。
53、可选地,在本技术实施例所述的直线电机自适应智能控制系统中,所述获取多轴机械手在预设时间段周期内的动力姿态数据和重力载荷数据,包括瞬时速率数据、加速度数据、质心线倾斜数据、载荷分布数据、负载数据以及重心位置数据,包括:
54、获取多轴机械手直线电机功率调变周期;
55、根据所述功率调变周期采集所述多轴机械手在预设时间段内的动态参数集,包括重量参数、载重参数、惯性参数、速度参数、角度姿态参数以及重力分布参数;
56、根据所述载重参数、惯性参数、速度参数、角度姿态参数获得所述预设时间段周期内的动力姿态数据,包括瞬时速率数据、加速度数据、质心线倾斜数据;
57、根据所述重量参数、载重参数、重力分布参数获得所述预设时间段周期内的重力载荷数据,包括载荷分布数据、负载数据以及重心位置数据。
58、第三方面,本技术实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质中包括直线电机自适应智能控制方法程序,所述直线电机自适应智能控制方法程序被处理器执行时,实现如上述任一项所述的直线电机自适应智能控制方法的步骤。
59、由上可知,本技术实施例提供的一种直线电机自适应智能控制方法、系统及存储介质通过获取多轴机械手在预设时间段周期内的动力姿态数据和重力载荷数据以及当前直线电机的运转数据并获取电机功率负载激励数据结合电机负载功率因子判断电机工作状态,根据当前电机工作状态阈值获得电机功率干扰因子,再根据电机功率负载激励数据结合电机负载功率因子和电机功率干扰因子在电机扰动自适应模型中处理获得电机输出功效数据并对直线电机进行调节并获取电机修正时效变化数据以及对电机调节后工作状态的有效性判断,从而实现根据电机功率干扰因子以及结合电机功率负载激励数据在电机扰动自适应模型中获得电机输出功效数据对电机进行自适应智能化控制的技术。
60、本技术的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术实施例了解。本技术的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!