一种双臂可重构机器人协调控制方法、系统、设备及介质
本发明涉及机器人控制系统及控制算法领域,特别是涉及一种双臂可重构机器人协调控制方法、系统、设备及介质。
背景技术:
1、随着工业化进程的不断发展成熟,机器人以其高效率和安全低成本,逐渐取代人工劳力,成为工业自动化领域不可或缺的一员。与单臂机器人相比,双臂机器人能够模仿人类执行任务,完成操作任务时更为灵活。同时双臂机器人可以给予系统一定的仿人属性和亲和力,能够更加贴近人类所能完成的任务。与传统固定构形机器人相比,可重构机器人是一种模块化的,能够根据不同任务需要改变构形的智能化机器人。传统的工业机器人都是根据特定的应用环境来开发的,而且随着机器人的应用范围越来越广,单一构形的机器人无法胜任于不同的任务,已经不能满足市场的需求,因此双臂可重构机器人在军事、航天、救援等领域中起到了重大作用。
2、当双臂可重构机器人夹取目标工具进行搬运时,由于夹取位置以及目标工具种类不同,会导致目标工具产生几何不确定性,进而导致抓取矩阵发生变化,从而使得双臂可重构机器人的运动学发生变化。目前通常都假设工具的质心位置已知,但在实际应用中,机器人往往要搬运不同尺寸的目标工具或无法保证以同一抓取姿态和抓取点来搬运目标工具。
3、此外,当双臂可重构机器人系统在极端环境下执行搬运任务时,不但要考虑系统整体的稳定性,还需要考虑机器人系统在无人直接参与的环境下能源损失问题。
4、因此,如何解决极端环境下受未知工具约束的双臂可重构机器人系统搬运任务问题,至关重要。
技术实现思路
1、本发明的目的是提供一种双臂可重构机器人协调控制方法、系统、设备及介质,能够稳定且不受工具限制的控制搬运任务的进行。
2、为实现上述目的,本发明提供了如下方案:
3、一种双臂可重构机器人协调控制方法,所述方法应用于双臂可重构机器人系统,所述双臂可重构机器人系统包括:依次连接的机械臂、关节、末端执行器和目标工具;
4、所述方法包括:
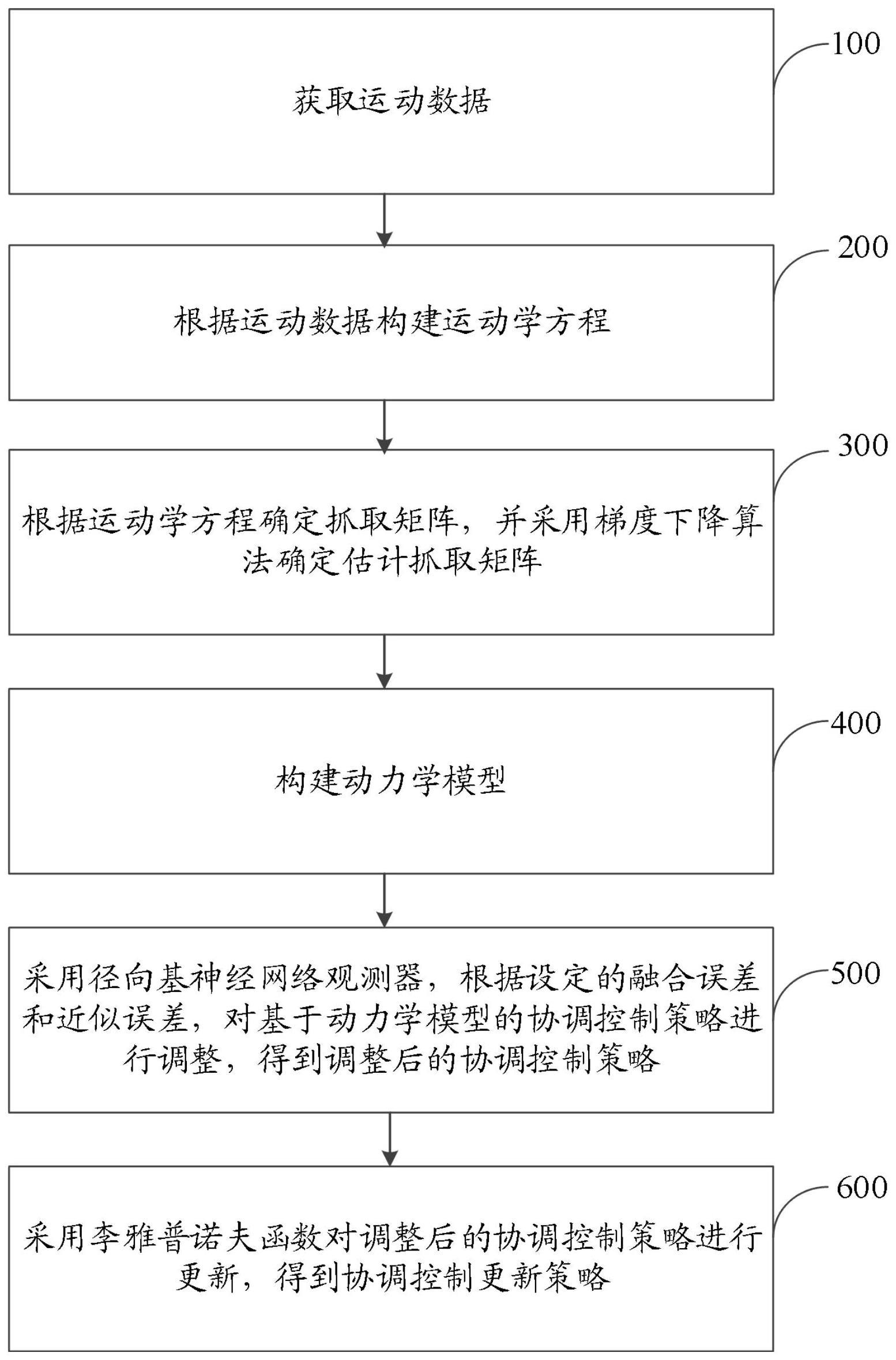
5、获取运动数据;所述运动数据包括:目标工具的质心速度和末端执行器的速度;
6、根据所述运动数据构建运动学方程;所述运动学方程用于表征双臂可重构机器人在目标工具约束下的运动学关系;
7、根据所述运动学方程确定抓取矩阵,并采用梯度下降算法确定估计抓取矩阵;
8、构建动力学模型;所述动力学模型是基于载荷分配矩阵,根据所述估计抓取矩阵确定的双臂可重构机器人系统的数学模型;所述动力学模型包括:机械臂动力学模型和目标工具动力学模型;
9、采用径向基神经网络观测器,根据设定的融合误差和近似误差,对基于所述动力学模型的协调控制策略进行调整,得到调整后的协调控制策略;
10、采用李雅普诺夫函数对调整后的协调控制策略进行更新,得到协调控制更新策略;所述协调控制更新策略用于控制双臂可重构机器人系统处理搬运任务。
11、可选地,所述运动学方程的表达式为:
12、
13、其中,i为机械臂的序号;为目标工具的质心速度;joi(xo)为末端执行器的速度与目标工具的质心速度映射关系的抓取矩阵;为末端执行器速度;xo为目标工具的位置。
14、可选地,所述径向基神经网络观测器的数学模型表达式为:
15、
16、其中,为观测器系统的第一状态速度;为观测器系统的第二状态速度;为估计的机器人第一动力学模型信息;为估计的机器人第二动力学模型信息;τfi为机器人末端执行器与外界环境接触的外力矩;xg1为观测器系统第一状态;xg2为观测器系统第二状态;co1为观测器第一增益矩阵;co2为观测器第二增益矩阵;eo1为观测器第一观测误差;qi为关节空间位移;τi为时间触发下的协调控制策略;eo2为观测器第二观测误差;为关节速度。
17、可选地,调整后的协调控制策略的表达式为:
18、
19、其中,τi(sij(xij))为调整后的协调控制策略;qi为关节空间位移;为第二理想权值的估计值;sij(xij)为事件触发下反映机器人跟踪误差的融合函数;xij为事件触发下的第一状态;为关节速度;为第一理想权值的估计值;为神经网络估计下的机器人第二动力学模型信息;di为跟踪误差增益;为神经网络估计下的机器人第一动力学模型信息;vi为机器人各部分跟踪误差残差项;τfi为机器人末端执行器与外界环境接触的外力矩。
20、可选地,采用李雅普诺夫函数对调整后的协调控制策略进行更新,得到协调控制更新策略,具体包括:
21、获取李雅普诺夫函数v=v1+ve并对所述李雅普诺夫函数进行求导计算,得到求导结果;
22、根据所述求导结果采用设定条件,并依据不等式确定调控参数;所述设定条件为所述求导结果不大于零;所述调控参数包括:补偿参数和触发参数;
23、所述不等式为:
24、γε||eji(t)||≥σ(||sij(xij)||+ζ);
25、根据所述调控参数对调整后的协调控制策略进行更新,得到协调控制更新策略;
26、其中,v为李雅普诺夫函数;γ是利普希茨常数;σ为补偿参数;ζ为触发参数;sij(xij)为事件触发下反映机器人跟踪误差的融合函数;v1为基于神经网络观测器的李雅普诺夫函数;ve为反映机器人系统跟踪性能的李雅普诺夫;ε为事件触发稳定性增益;eji(t)为触发前后的机器人状态残差;||.||为参数的范数表示。
27、一种双臂可重构机器人协调控制系统,所述系统包括:
28、数据获取模块,用于获取运动数据;所述运动数据包括:目标工具的质心速度和末端执行器的速度;
29、方程构建模块,用于根据所述运动数据构建运动学方程;所述运动学方程用于表征双臂可重构机器人在目标工具约束下的运动学关系;
30、估计模块,用于根据所述运动学方程确定抓取矩阵,并采用梯度下降算法确定估计抓取矩阵;
31、模型构建模块,用于构建动力学模型;所述动力学模型是基于载荷分配矩阵,根据所述估计抓取矩阵确定的双臂可重构机器人系统的数学模型;所述动力学模型包括:机械臂动力学模型和目标工具动力学模型;
32、调整模块,用于采用径向基神经网络观测器,根据设定的融合误差和近似误差,对基于所述动力学模型的协调控制策略进行调整,得到调整后的协调控制策略;
33、更新模块,用于采用李雅普诺夫函数对调整后的协调控制策略进行更新,得到协调控制更新策略;所述协调控制更新策略用于控制双臂可重构机器人系统处理搬运任务。
34、一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述所述的双臂可重构机器人协调控制方法。
35、一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现上述所述的双臂可重构机器人协调控制方法。
36、根据本发明提供的具体实施例,本发明公开了以下技术效果:
37、本发明提供了一种双臂可重构机器人协调控制方法、系统、设备及介质,通过获取运动数据,根据运动数据构建运动学方程;根据运动学方程确定抓取矩阵,并采用梯度下降算法确定估计抓取矩阵;构建动力学模型;采用径向基神经网络观测器,根据设定的融合误差和近似误差,对动力学模型的协调控制策略进行调整,得到调整后的协调控制策略;采用李雅普诺夫函数对调整后的协调控制策略进行更新,得到协调控制更新策略;协调控制更新策略用于控制双臂可重构机器人系统处理搬运任务,能够稳定且不受工具限制的控制搬运任务的进行。
- 还没有人留言评论。精彩留言会获得点赞!