一种轨道车辆智能钻孔系统的制作方法
1.本发明涉及自动化生产设备的技术领域,特别是涉及一种轨道车辆智能钻孔系统。
背景技术:
2.根据轨道交通车辆整车项目制造工艺,车厢车体在组焊接后,车厢前后端和车门等部位需要进行车门等安装孔的加工,孔径、孔深、孔坐标位置都是有严格规范和要求,如果低于标准值,就会影响到后期装配的技术要求,造成安全隐患。
技术实现要素:
3.本发明主要解决的技术问题是提供一种轨道车辆智能钻孔系统,旨在改善现有的钻孔设备工作精度低的问题,使用机器人自动视觉识别与定位、钻孔加工后自动检测,能够有效保证钻孔质量的一致性。
4.为解决上述技术问题,本发明采用的一个技术方案是:提供一种轨道车辆智能钻孔系统,包括:agv移载车,设置agv移载车上的机器人、辅助固定机构以及电控系统,所述机器人的前端设置有视觉识别系统、钻孔模组以及废屑收集装置,所述辅助固定机构为液压系统,包括:液压平台、设置于液压平台上的液压油箱、液压泵、压力表以及液压回路,所述液压平台的下方设置有四个液压缸,所述液压缸的输出端贯穿agv移载车可与地面相抵撑;所述钻孔模组包括安装于机器人前端的钻孔主轴以及设置于钻孔主轴上的刀具,所述废屑收集装置设置于钻孔模组的侧面,包括设置于机器人前端的废屑收集器和吸尘器连接口,所述废屑收集器与吸尘器连接口之间通过连接软管相连接。
5.在本发明一个较佳实施例中,所述电控系统与数据控制中心连接,用于向数据控制中心发出控制指令,所述数据控制中心根据所述控制指令控制所述agv移载车、机器人、辅助固定机构、视觉识别系统、钻孔模组的动作。
6.在本发明一个较佳实施例中,所述视觉识别系统包括设置于机器人前端的ccd相机和ccd光源。
7.在本发明一个较佳实施例中,所述废屑收集器的的侧面设置有挡板。
8.在本发明一个较佳实施例中,所述agv移载车上设置有刀具库。
9.本发明的有益效果是:本发明的轨道车辆智能钻孔系统,智能钻孔机器人及自动视觉识别与定位、钻孔加工后自动检测,能够有效保证钻孔质量的一致性,提高了钻孔的工作效率,提高了钻孔的工作精度。
附图说明
10.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它
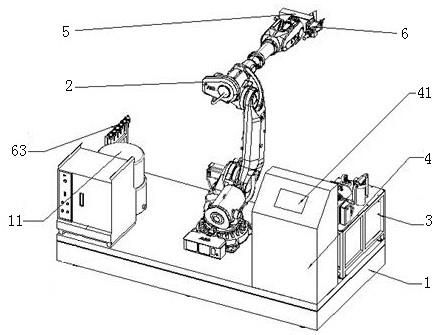
的附图,其中:图1是本发明一种轨道车辆智能钻孔系统的结构示意图;图2是本发明一种轨道车辆智能钻孔系统中辅助固定机构的结构示意图;图3是本发明一种轨道车辆智能钻孔系统中钻孔模组的结构示意图;图4是本发明一种轨道车辆智能钻孔系统工作流程示意图。
具体实施方式
11.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
12.请参阅图1
‑
3,本发明实施例包括:提供一种轨道车辆智能钻孔系统,包括:agv移载车1,设置agv移载车上的机器人2、辅助固定机构3以及电控系统4,电控系统上设置有hmi人机界面41,方便人员操作,所述机器人的前端设置有视觉识别系统5、钻孔模组6以及废屑收集装置,所述辅助固定机构包括:液压平台31、设置于液压平台上的液压油箱32、液压泵33、压力表34以及液压回路35,所述液压平台的下方设置有四个液压缸36,所述液压缸的输出端贯穿agv移载车可与地面相抵撑,辅助固定机构的功能主要是实现agv移栽车自动导航行驶到达加工工位后,四个液压缸伸出支撑地面,确保在钻孔过程中移栽车不发生位置偏移,提高加工工艺精度,需要说明的是,辅助固定机构采用的液压系统不仅限于本发明实施例中公开的结构,现有技术中凡是可以驱动液压缸伸出以支撑地面的液压系统均适用于本发明。
13.所述钻孔模组6包括安装于机器人前端的钻孔主轴61以及设置于钻孔主轴上的刀具62,在agv移载车上还设置有刀具库63,方便机器人随时根据需求更换合适的刀具,所述废屑收集装置设置于钻孔模组的侧面,包括设置于机器人前端的废屑收集器7和吸尘器连接口8,所述废屑收集器与吸尘器连接口之间通过连接软管相连接9,废屑收集器的的侧面设置有挡板10,钻孔时方便将废屑引导至废屑收集器内,吸尘器连接口连接吸尘器,在agv移载车上可加装排屑收集桶11,方便存储吸尘器收集的废屑,所述电控系统与数据控制中心连接,用于向数据控制中心发出控制指令,所述数据控制中心根据控制指令控制所述agv移载车、机器人、辅助固定机构、视觉识别系统、钻孔模组的动作。
14.具体的,所述视觉识别系统5包括设置于机器人前端的ccd相机51和ccd光源52,钻孔模组安装在机器人前端第六关节处,由机械手移动工作点位。
15.工作原理:具体实施时,通过视觉识别系统定位引导,使用移动式的钻孔机器人来完成车体钻孔工作,以实现钻孔技术要求, 作业时将车厢固定在移载台架上,通过agv移载车移动至需要钻孔的工位上, 辅助固定机构到位后由数据控制中心控制电控系统、机器人及钻机模组,通过视觉识别定位后进行钻孔操作,当一个工位的作业任务完成后,将固定装置升起并移动到下一个工位进行作业,如图4所示,结合车厢的型号,需要对不同型号的车厢加工程序进行预处理,针对某车厢的加工启动钻孔设备后,将执行以下动作流程,agv将根据工作区间的划分由初始工作位,分别移动到第一、二、三
……
十工作位进行定位钻孔。
16.综上所述,本发明指出的一种轨道车辆智能钻孔系统,本发明的轨道车辆智能钻
孔系统,智能钻孔机器人及自动视觉识别与定位、钻孔加工后自动检测,能够有效保证钻孔质量的一致性,提高了钻孔的工作效率,提高了钻孔的工作精度。
17.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1