电化学放电加工用柔性力反馈控制主轴头
1.本发明涉及微细特种加工技术领域,具体而言,涉及一种电化学放电加工用柔性力反馈控制主轴头。
背景技术:
2.传统机械加工方法难以加工非导电陶瓷、石英等硬脆材料。电化学放电加工(electrochemical discharge machining,ecdm)作为一种特种加工方法,是利用浸入电解液内工具电极表面电解气泡形成气膜,作为绝缘介质击穿火花放电产生高温高压,综合物理化学作用去除工件材料,适用于绝缘硬脆材料的加工。
3.电化学放电加工过程中工具电极进给策略是影响加工间隙的决定性因素,工具电极进给方式主要有恒速/恒量进给、重力进给和接触力反馈进给方式。
4.恒速进给是在加工中随着加工深度来给定工具电极向下恒定的进给速度,主要用于孔加工过程中保持加工间隙;恒量进给是主要应用于分层扫描加工中,通过扫描加工每层后给定工具电极向下进给的确定深度来调整加工间隙,但由于电化学放电加工中材料的去除率难以准确预测,而且随着工件材料去除、工具电极损耗、热膨胀等加工条件变化而改变,因此难以设定合理的恒速进给速度和恒量进给深度,这样为避免工具电极碰撞问题而必须采用欠进给方式,造成了较低的材料去除率。
5.重力进给是采用类似于天平原理在工具电极上施加给定的重力,以保持工具电极与工件表面一定接触力来调控加工间隙,但其接触力容易受到工具电极长度及重量、加工进给深度、工件表面不平整等干涉因素的影响而改变,对工艺过程造成不利影响。
6.接触力反馈进给方式是在电化学放电加工中通过压力传感器反馈工具电极与工件之间的接触力,伺服控制保持给定的接触力来保持加工间隙的方法,虽然接触力反馈进给方式可以基本保持接触力不变,但扫描加工中工具电极端部受到接触力产生的摩擦力使得悬臂梁工具电极极易弯曲,特别是对于刚性微细工具电极瞬间可能很大的接触力,产生的摩擦力导致工具电极弯曲甚至折断,由此造成微小结构难以精密高效成形加工,仅能应用在较大尺寸孔的电化学放电加工中。因而存在研究价值空间。
技术实现要素:
7.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的一个目的在于提出一种电化学放电加工用柔性力反馈控制主轴头,可以保持微细电化学放电扫描加工中工具电极进给中微小接触力,提高加工工艺过程稳定性。
8.根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,包括:主轴背板;加工模块,所述加工模块设于所述主轴背板的一侧且具有夹持有工具电极的夹头;力反馈模块,所述力反馈模块设于所述加工模块的上方且具有复合柔性件和压力传感器,所述复合柔性件设于所述加工模块上方且与所述加工模块连接,所述压力传感器设于所述复合柔性件上方且连接于控制器,所述压力传感器用于检测所述工具电极与工件之间的接触力;
平衡模块,所述平衡模块设于所述力反馈模块上方且与所述压力传感器配合,所述平衡模块具有固定的导轮和可转动的摇臂,所述摇臂设于所述导轮上方,所述平衡模块具有线缆,所述线缆的第一端与所述加工模块连接,所述线缆可绕设所述导轮,所述线缆的第二端固定在所述摇臂或与重物连接。
9.根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,通过采用复合柔性件提高超柔性接触力,通过压力传感器反馈柔性接触力,伺服保持微力接触的加工间隙,可以较好地控制微小加工间隙,提高加工工艺过程稳定性,通过平衡模块提高伺服控制响应速度,实现工具电极与工件之间微小柔性接触力反馈及控制,进而可以保持微细电化学放电扫描加工中工具电极进给中微小接触力,避免扫描加工中刚性工具电极弯曲、折断等问题,保持连续稳定的电化学放电加工过程。
10.根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,所述力反馈模块包括:压力传感器支架,所述压力传感器设于所述压力传感器支架上;铰链框架,所述复合柔性件设于所述铰链框架;铰链连接支架,所述铰链连接支架设于所述压力传感器支架和所述铰链框架之间,且所述铰链连接支架分别与所述压力传感器支架和所述铰链框架连接;柔性铰链连接件,所述柔性铰链连接件设于所述铰链框架下部且与所述加工模块固定连接。
11.在一些示例中,所述复合柔性件包括拉伸柔性铰链和压缩柔性铰链,所述拉伸柔性铰链中孔沿柔性铰链连接轴螺纹段套入,所述拉伸柔性铰链的外周通过铰链压块压紧在所述铰链框架上,所述压缩柔性铰链与所述铰链框架通过长销固定连接,所述压缩柔性铰链与柔性铰链连接轴通过短销固定连接,所述柔性铰链连接件与所述柔性铰链连接轴螺纹配合。
12.在一些示例中,还包括:柔性件固定块,所述柔性件固定块包括底板和多个侧板,多个侧板沿所述底板的周向间隔布置,所述柔性件固定块适于从所述铰链框架的一侧插入,直至所述底板与所述铰链框架的另一侧抵接,所述侧板插接至所述复合柔性件与所述铰链框架之间的缝隙或所述侧板套设在所述铰链框架外侧以包裹所述复合柔性件。
13.在一些示例中,所述加工模块包括:主轴支架,所述主轴支架与所述主轴背板连接且具有通孔;导向模组,所述导向模组设于所述主轴支架上,所述导向模组的下端设有可穿设所述通孔的所述夹头;平衡轴模组,所述平衡轴模组设于所述导向模组的上方且与所述导向模组配合,所述平衡轴模组具有相互连接的纵轴和平衡轴,所述纵轴与所述导向模组配合,所述夹头通过电信号引入螺钉和夹头固定紧定螺钉固定在所述纵轴的下端,所述平衡轴与所述纵轴垂直,所述线缆的第一端设于所述平衡轴。
14.在一些示例中,所述平衡轴模组包括顶块和主轴连接件,所述平衡轴适于从所述顶块的侧面插入所述顶块内且与所述顶块固定连接,所述柔性铰链连接件的下部与所述顶块的上部固定连接,所述主轴连接件的上部与所述顶块的下部固定连接,所述主轴连接件下部与所述纵轴顶部固定连接。
15.在一些示例中,所述导向模组包括直线轴承导向模组,所述直线轴承导向模组包括直线轴承底板、直线轴承和缓冲弹簧,所述直线轴承底板固定在所述主轴支架上,所述直线轴承固定在所述直线轴承底板上,所述纵轴可穿设所述直线轴承,所述缓冲弹簧套设在所述纵轴外侧且分别与所述主轴连接件的下端以及所述直线轴承的上端抵接配合,其中,
所述顶块和所述直线轴承底板为绝缘材料件。
16.在一些示例中,所述导向模组包括双片导向模组,所述双片导向模组包括双片导向器和限位块固定铜柱,所述双片导向器包括上片和下片,所述限位块固定铜柱将所述双片导向器的下片固定在所述主轴支架上,所述双片导向器的上片固定在所述限位块固定铜柱上,所述纵轴可穿设所述上片和所述下片。
17.在一些示例中,还包括:限位块,所述主轴支架具有开口槽,所述限位块设于所述开口槽处,所述纵轴可穿设所述上片和所述下片插入所述限位块内,所述夹头的外径大于所述限位块下部的内径且小于所述限位块下部的外径,其中,所述限位块为绝缘材料件,所述开口槽下端面的尺寸大于上端面的尺寸。
18.在一些示例中,所述加工模块具有直线轴承导向连接模式和双片导向连接模式,所述主轴支架可相对于所述主轴背板水平移动以切换所述加工模块的模式。
19.根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,所述平衡模块包括:导轮模组,所述导轮模组包括可相对于所述主轴背板上下活动的导轮支架,所述导轮支架设于所述主轴背板且与所述压力传感器支架连接,所述导轮支架包括两个支杆,每个所述支杆具有第一安装槽,所述第一安装槽沿垂直于所述主轴背板的方向延伸,所述导轮通过穿设所述第一安装槽的导轮轴安装在所述支杆的一侧,每个所述支杆上设有两个所述导轮;摇臂模组,所述摇臂模组包括两个间隔布置的摇臂、摇臂轴、滑块和滑块连接板,两个所述摇臂与两个所述支杆一一对应且每个所述摇臂位于对应所述支杆上方,每个所述摇臂的一端与所述摇臂轴连接,所述摇臂具有第二安装槽,所述滑块与所述第二安装槽配合,所述滑块连接板设在所述摇臂的上方且与所述滑块连接;电机模组,所述电机模组包括电机支架和电机,所述电机支架设于所述主轴背板,所述电机设于所述电机支架且与所述摇臂轴连接以驱动所述摇臂轴转动,进而带动所述摇臂转动。
20.在一些示例中,还包括:轴承模组,所述轴承模组包括:滚动轴承、滚动轴承座、摇臂限位杆,所述滚动轴承设于所述滚动轴承座,所述摇臂轴的另一端与所述滚动轴承配合;所述摇臂限位杆插接在所述滚动轴承座的通孔内,所述摇臂限位杆的延伸方向与所述摇臂轴的延伸方向相同。
21.在一些示例中,每个所述支杆上的两个所述导轮之间的距离可调;和/或,所述滑块在所述第二安装槽内的位置可调。
22.在一些示例中,所述电化学放电加工用柔性力反馈控制主轴头包括恒力矩输出模式,其中,所述线缆包括两个,两个所述线缆的第一端固定在所述平衡轴的两侧对称位置,每个线缆向上引至一个所述导轮的后方,并依次绕过所述导轮的上部和另一导轮的下部,并通过另一导轮的前侧引出,所述线缆的第二端向上继续绕过所述滑块并固定在所述摇臂处;所述电化学放电加工用柔性力反馈控制主轴头包括重物垂吊模式,其中,所述线缆包括两个,两个所述线缆的第一端固定在所述平衡轴的两侧对称位置,每个线缆向上引至一个所述导轮的后方,并依次绕过所述导轮的上部和另一导轮的上部,并通过另一导轮的前侧引出,所述线缆的第二端向下系于重物上。
23.根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,还包括:导线固定模块,所述导线固定模块包括多个,多个所述导线固定模块设于所述主轴背板、所述加工模块、所述力反馈模块、所述平衡模块,用于固定导线。
24.根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,还包括:主轴固定板,所述主轴固定板设于所述主轴背板的另一侧,所述主轴固定板适于固定在电化学放电加工设备的主体上。
25.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
26.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
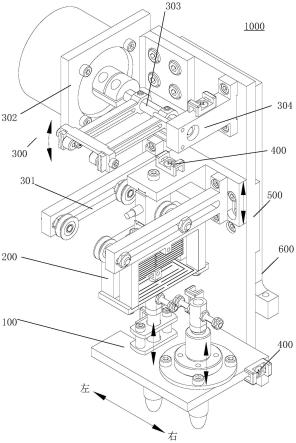
27.图1是根据本发明实施例的一种电化学放电加工用柔性力反馈控制主轴头的立体图;
28.图2是根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头在直线轴承导向连接模式下的正视图;
29.图3是根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头在直线轴承导向连接模式下的侧视图;
30.图4是根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头在直线轴承导向连接模式下的俯视图;
31.图5是根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头在双片导向连接模式下的正视图;
32.图6是根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头在双片导向连接模式下的侧视图;
33.图7是图2中a结构的放大图;
34.图8是图2中b结构的放大图;
35.图9是图2中c结构的放大图;
36.图10是图2中d结构的放大图;
37.图11是图2中e结构的放大图;
38.图12是图2中f结构的放大图;
39.图13是图3中g结构的放大图;
40.图14是图3中h结构的放大图;
41.图15是图3中i结构的放大图;
42.图16是图4中j结构的放大图;
43.图17是图5中k结构的放大图;
44.图18是图6中l结构的放大图;
45.图19是根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头在恒力矩输出模式平衡主轴重力绕线方式;
46.图20是根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头在重物垂吊模式平衡主轴重力绕线方式;
47.图21是根据本发明实施例的柔性件固定块的结构示意图;
48.图22是根据本发明实施例的柔性件固定块在一个视角的安装示意图;
49.图23是根据本发明实施例的柔性件固定块在另一个视角的安装示意图;
50.图24是图23中m结构的放大图;
51.图25是根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头的主轴切换方式初始状态示意图;
52.图26是根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头的主轴切换方式在步骤1时的示意图;
53.图27是根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头的主轴切换方式在步骤2时的示意图;
54.图28是根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头的主轴切换方式在步骤3时的示意图;
55.图29是根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头的主轴切换方式在步骤4时的示意图;
56.图30是根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头的主轴切换方式在步骤5时的示意图;
57.图31是根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头的主轴切换方式在步骤6时的示意图。
58.附图标记:
59.1000:电化学放电加工用柔性力反馈控制主轴头;
60.100:加工模块;101:直线轴承导向模组;102:双片导向模组;200:力反馈模块;300:平衡模块;301:导轮模组;302:电机模组;303:摇臂模组;304:轴承模组;400:导线固定模块;500:主轴背板;600:主轴固定板;700:柔性件固定块;701:底板;702:侧板;1:电机;2:电机支架;3:刚性联轴器;4:摇臂固定紧定螺钉;5:滚动轴承;6:摇臂轴;7:压力传感器连接螺钉;8:压力传感器支架;9:压力传感器;10:导轮;11:导轮轴;12:导轮轴固定螺母;13:铰链连接支架;14:铰链连接支架固定螺钉;15:铰链框架;16:长销;17:压缩柔性铰链;18:短销;19:柔性铰链连接轴;20:拉伸柔性铰链;21:柔性铰链连接件;22:平衡线缆固定螺母;23:平衡轴;24:顶块;25:主轴连接件;26:缓冲弹簧;27:直线轴承;28:纵轴;29:直线轴承底板;30:主轴支架;31:电信号引入螺钉;32:夹头;33:夹头固定紧定螺钉;34:导线固定座;35:导线固定座固定螺钉;37:滚动轴承座固定螺钉;38:滚动轴承座;39:导轮支架;40:导轮支架固定螺钉;41:压力传感器支架固定螺钉;42:主轴背板固定螺钉;44:主轴支架固定螺钉;45:直线轴承固定螺钉;46:直线轴承底板固定螺钉;47:铰链压块固定螺钉;48:铰链压块;49:铰链框架固定螺钉;50:电机支架固定螺钉;51:摇臂限位杆;52:滑块固定螺母;53:滑块固定垫片;54:摇臂;55:滑块;56:滑块连接板;57:滑块固定螺钉;58:电机固定螺钉;59:限位块;60:导向器固定螺钉;61:限位块固定铜柱;62:双片导向器;70:线缆。
具体实施方式
61.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
62.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
63.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
64.下面参考图1-图31描述根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头1000。
65.如图1-图31所示,根据本发明一个实施例的电化学放电加工用柔性力反馈控制主轴头1000包括:主轴背板500、加工模块100、力反馈模块200和平衡模块300,加工模块100设于主轴背板500的一侧,加工模块100具有夹持有工具电极的夹头32;力反馈模块200设于加工模块100的上方,力反馈模块200具有复合柔性件和压力传感器9,复合柔性件设于加工模块100上方且与加工模块100连接,压力传感器9设于复合柔性件上方,压力传感器9用于检测工具电极与工件之间的接触力,压力传感器9可外接于控制器,以实时反馈检测到的接触力,而通过设置复合柔性件,并将压力传感器9设在复合柔性件上,复合柔性件可以在压缩和拉伸时提供较大地压缩柔度和拉伸柔度,提高了整体的灵敏度和精度,结合压力传感器,可以实时反馈工具电极端部接触力并进行伺服控制,保持电化学放电加工中合理的加工间隙。
66.平衡模块300设于力反馈模块200上方,且平衡模块300与压力传感器9配合,平衡模块300具有导轮10和摇臂54,摇臂54设于导轮10上方,平衡模块300具有线缆,线缆的第一端与加工模块100连接,线缆可绕设导轮10,线缆的第二端固定在摇臂54或与重物连接,由此实现对工具电极处受力的平衡。
67.根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头1000,通过采用复合柔性件在压缩和拉伸时提供较大地压缩柔度和拉伸柔度,提高超柔性接触力,通过压力传感器9反馈柔性接触力,伺服保持微力接触的加工间隙,可以较好地控制微小加工间隙,提高加工工艺过程稳定性,通过平衡模块300提高伺服控制响应速度,实现工具电极与工件之间微小柔性接触力反馈及控制,进而可以保持微细电化学放电扫描加工中工具电极进给中微小接触力,避免扫描加工中刚性工具电极弯曲、折断等问题,保持连续稳定的电化学放电加工过程。
68.如图2和图9所示,在一些示例中,力反馈模块200包括:压力传感器支架8、铰链框架15、铰链连接支架13和柔性铰链连接件21,压力传感器9设于压力传感器支架8上,复合柔性件设于铰链框架15,铰链连接支架13设于压力传感器支架8和铰链框架15之间,且铰链连接支架13分别与压力传感器支架8和铰链框架15连接,柔性铰链连接件21设于铰链框架15下部,且柔性铰链连接件21与加工模块100固定连接,由此实现力反馈模块200的装配。
69.如图2和图11所示,在一些示例中,复合柔性件包括拉伸柔性铰链20和压缩柔性铰链17,拉伸柔性铰链20中孔沿柔性铰链连接轴19螺纹段套入,拉伸柔性铰链20的外周通过铰链压块48压紧在铰链框架15上,压缩柔性铰链17与铰链框架15通过长销16固定连接,压缩柔性铰链17与柔性铰链连接轴19通过短销18固定连接,柔性铰链连接件21与柔性铰链连接轴19螺纹配合,直至将拉伸柔性铰链20中部平面与柔性铰链连接轴19端部紧贴。
70.这里复合柔性件由压缩柔性铰链17和拉伸柔性铰链20结合而成,通过压缩柔性铰链17提供极大的压缩柔度,同时拉伸柔性铰链20提供较大的拉伸柔度,提高了力反馈模块200整体的灵敏度和精度,结合高分辨率的压力传感器9,可实时反馈加工中工具电极端部接触力并进行伺服控制,保持电化学放电加工中合理的加工间隙。
71.需要说明的是,这里的拉伸柔性铰链20可以进行拉伸,压缩柔性铰链17可以既可以进行压缩,也可以实现拉伸。
72.如图21所示,在一些示例中,柔性件固定块700包括底板701和多个侧板702,多个侧板702沿底板701的周向间隔布置,柔性件固定块700适于从铰链框架15的一侧插入,直至底板701与铰链框架15的另一侧抵接,侧板702插接至复合柔性件与铰链框架15之间的缝隙内,或者侧板702套设在铰链框架15外侧,实现对复合柔性件的包裹,由此可以提供可靠的握持力,限制装拆时复合柔性件受力而发生形变,保持柔性铰链受力性能的稳定。
73.如图21-图24所示,在一些具体的示例中,柔性件固定块700包括后部底板701、左右两个侧板702、上侧两个侧板702、下侧两个侧板702。
74.柔性件固定块700沿力反馈模块200中复合柔性件的左/右侧插入,至后部底板701内侧端面与铰链框架15左/右外侧面贴合后,左右两个侧板702的内侧面与铰链框架15前后侧面贴合,左右两个侧板702的下表面与铰链压块48凸出于铰链框架15外侧的凸台部贴合,上侧两个侧板702的上表面与铰链框架15顶部内表面贴合,上侧两个侧板702中部的凹槽卡住压缩柔性铰链与铰链框架15连接处的前后侧,且凹槽的后侧面可以卡住压缩柔性铰链与铰链框架15连接处的左/右侧平面,此时主轴受力无法使复合柔性件发生扭转变形;下侧两个侧板702的下侧面与拉伸柔性铰链20上表面贴合,此时主轴受力无法使复合柔性件发生压缩变形,实现对复合柔性件的保护,限制装拆时复合柔性件受力而发生形变,便于搬运操作等,保持柔性铰链受力性能的稳定。
75.如图1-图3所示,在一些示例中,加工模块100包括:主轴支架30、导向模组和平衡轴模组,主轴支架30与主轴背板500连接,主轴支架30具有通孔;导向模组设于主轴支架30上,导向模组的下端设有可穿设通孔的夹头32,平衡轴模组设于导向模组的上方,平衡轴模组与导向模组配合,平衡轴模组具有相互连接的纵轴28和平衡轴23,纵轴28与导向模组配合,夹头32通过电信号引入螺钉31和夹头固定紧定螺钉33固定在纵轴28的下端,平衡轴23与纵轴28垂直,线缆的第一端设置在平衡轴23上。
76.如图2和图11所示,在一些示例中,平衡轴模组包括顶块24和主轴连接件25,平衡轴23适于从顶块24的侧面插入顶块24内,且平衡轴23可以与顶块24固定连接,柔性铰链连接件21的下部与顶块24的上部固定连接,主轴连接件25的上部与顶块24的下部固定连接,主轴连接件25下部与纵轴28顶部固定连接,由此实现平衡轴模组与力反馈模组200的配合。
77.如图2、图11和图12所示,在一些示例中,导向模组包括直线轴承导向模组101,直线轴承导向模组包括直线轴承底板29、直线轴承27和缓冲弹簧26,直线轴承底板29固定在
主轴支架30上,直线轴承27固定在直线轴承底板29上,纵轴28可穿设直线轴承27,缓冲弹簧26套设在纵轴28外侧,且缓冲弹簧26的上端面与主轴连接件25的下端抵接配合,缓冲弹簧26的下端面与直线轴承27的上端抵接配合,实现直线轴承导向模组101的装配。
78.其中,顶块24和直线轴承底板29为绝缘材料件,由此当电信号由电信号引入螺钉31引入主轴时,直线轴承轴27、纵轴28和夹头32带电,直线轴承底板29将直线轴承轴27与主轴支架30隔开,实现轴向向下绝缘;顶块24使柔性铰链连接件21、平衡轴23和主轴连接件25存在间隙,实现轴向向上绝缘;直线轴承27、直线轴承底板固定螺钉46之间存在间隙,夹头32、直线轴承固定螺钉45与主轴支架30内孔互相之间存在间隙,实现径向绝缘,保证加工模块100与力反馈模块200、平衡模块300之间互相绝缘,保证了主轴整体的安全性。
79.如图5和图6所示,在一些示例中,导向模组包括双片导向模组102,双片导向模组包括双片导向器62和限位块固定铜柱61,双片导向器62包括上片和下片,限位块固定铜柱61将双片导向器62的下片固定在主轴支架30上,双片导向器62的上片固定在限位块固定铜柱61上,纵轴28可穿设上片和下片,通过上片和下片既可以约束柔性铰链带来的主轴径向偏摆,又可以减少摩擦,提供力反馈的精度。
80.双片导向器62的上片和下片可以采用摩擦系数极低的聚四氟乙烯,可以进一步确保微力反馈的精度。
81.如图1和图5所示,在一些示例中,主轴支架30具有开口槽,开口槽处设有限位块59,限位块59可以直接卡接在开口槽处,限位块59中部限定有通孔,纵轴28可穿设上片和下片插入限位块59的通孔内,纵轴28与限位块59的内壁面间隙配合,其中,夹头32的外径大于限位块59下部的内径且小于限位块59下部的外径,由此可以限制夹头32可向上移动的范围,避免夹头32与主轴支架接触造成安全隐患等。
82.在一些示例中,限位块59可以为绝缘材料件,当电信号由电信号引入螺钉31引入主轴时,限位块59下端面低于主轴支架30开口槽下表面,纵轴28运动使夹头32上端面与限位块59下端面重合时,无法直接接触主轴支架30,实现轴向向下绝缘;开口槽下端面的尺寸大于上端面的尺寸,限位块59下部外径大于夹头32,且主轴支架30下表面的开槽范围大于上表面,实现径向绝缘,保证加工模块100与力反馈模块200、平衡模块300之间互相绝缘,保证了主轴整体的安全性。
83.根据本发明的一些实施例,加工模块100具有直线轴承27导向连接模式和双片导向连接模式,主轴支架30可相对于主轴背板500水平移动,即可以切换加工模块100的模式,结构简单,便于操作。
84.如图1和图2所示,在一些示例中,平衡模块300包括:导轮模组301,导轮模组301包括导轮支架39,导轮支架39设于主轴背板500,导轮支架39可相对于主轴背板500上下活动,导轮支架39包括两个支杆,每个支杆具有第一安装槽,第一安装槽的延伸方向与主轴背板500垂直,导轮10通过穿设第一安装槽的导轮轴11安装在支杆的一侧,每个支杆上设有两个导轮10,两个导轮10之间的距离可调节,导轮支架39与压力传感器支架8连接,使导轮模组301固定在力反馈模块200上,此时无论主轴使用何种连接模式以及何种平衡绕线方式,在切换连接模式或拆卸主轴头1000整体的过程中,对力反馈模块200进行上下移动操作时,线缆的总长度均不会产生变化,不会影响主轴整体的行程,同时压缩了主轴整体的体积,便于实现主轴整体的轻质化。
85.平衡模块300还包括摇臂模组303,摇臂模组303包括两个间隔布置的摇臂54、摇臂轴6、滑块55和滑块连接板56,两个摇臂54与两个支杆一一对应,每个摇臂54位于对应支杆上方,每个摇臂54的一端与摇臂轴6连接,摇臂54具有第二安装槽,滑块55与第二安装槽配合,滑块连接板56设在摇臂54的上方,滑块连接板56与滑块55连接。通过设置两个支杆和两个摇臂54,两个支杆相对于夹头32的中心对称布置,两个摇臂54同样相对于夹头32的中心对称布置,由此可以提高整体结构的稳定性,同时便于对轴向力的控制,实现对接触力以及加工间隙的较好的控制。
86.平衡模块300还包括电机模组302,电机模组302包括电机支架2和电机1,电机支架2设置在主轴背板500上,电机1设在电机支架2上,电极1与摇臂轴6连接,从而可以驱动摇臂轴6转动,进而带动摇臂54转动,以进行恒力矩输出模式的控制。
87.如图1-图4所示,在一些示例中,平衡模块300还包括:轴承模组304,轴承模组304包括:滚动轴承5、滚动轴承座38、摇臂限位杆51,滚动轴承5设置在滚动轴承座38上,摇臂轴6的另一端与滚动轴承5配合;摇臂限位杆51插接在滚动轴承座38的通孔内,摇臂限位杆51的延伸方向与摇臂轴6的延伸方向相同,摇臂限位杆51可以在摇臂54转动时,对其进行一定的限位,避免摇臂54转动较大影响结构的稳定性,例如摇臂限位杆51可以对称布置在滚动轴承5的上方和下方,由此使得摇臂54在一定范围内摆动。
88.如图19和图20所示,在一些示例中,每个支杆上的两个导轮10之间的距离可调,其可以根据主轴重力变化进行调节,以维持最佳的平衡状态。
89.在一些示例中,滑块55在第二安装槽内的位置可调,其可以根据主轴重力变化进行调节,以维持最佳的平衡状态。
90.如图19所示,在一些示例中,电化学放电加工用柔性力反馈控制主轴头1000包括恒力矩输出模式,其中,线缆70包括两个,两个线缆70的第一端固定在平衡轴23的两侧对称位置,每个线缆70向上引至一个导轮10的后方,并依次绕过导轮10的上部和另一导轮10的下部,并通过另一导轮10的前侧引出,线缆70的第二端向上继续绕过滑块55并固定在摇臂54处,使线缆70将维持拉紧状态。其中,恒力矩输出模式的力矩可随主轴重力变化进行调节,以维持最佳的平衡状态。
91.如图20所示,在一些示例中,电化学放电加工用柔性力反馈控制主轴头1000包括重物垂吊模式,其中,线缆70包括两个,两个线缆70的第一端固定在平衡轴23的两侧对称位置,每个线缆70向上引至一个导轮10的后方,并依次绕过导轮10的上部和另一导轮10的上部,并通过另一导轮10的前侧引出,线缆70的第二端向下系于重物上,重物垂悬时,线缆70将维持拉紧状态。其中,重物垂吊模式的重物可随主轴重力变化进行调节,以维持最佳的平衡状态。
92.如图1所示,根据本发明的一些实施例,主轴头上还设有:导线固定模块400,导线固定模块400包括多个,导线固定模块400用于固定导线,导线固定模块400包括导线固定座34和导线固定座固定螺钉35,导线固定模块400可以设在在主轴背板500上,即通过导线固定座固定螺钉35将导线固定座34固定在主轴背板500上,对应地,加工模块100上也可以设有导线固定模块400,力反馈模块200上也可以设有导线固定模块400,平衡模块300上也可以设有导线固定模块400,由此便于导线在整体结构上的布局,使整体结构整齐美观,便于连接维修等,同时避免相互干涉。
93.如图1和图3所示,根据本发明的一些实施例,主轴背板500的另一侧还设有主轴固定板600,主轴背板500与主轴固定板600固定连接,主轴固定板600与电化学放电加工设备的主体固定连接,由此将加工模块100、力反馈模块200和平衡模块300固定在电化学放电加工设备的主体上,整体结构紧凑,装配方便。
94.下面结合图1-图31描述根据本发明的一个具体的实施例。
95.如图1、图2、图3、图4、图5、图6、图7、图8、图13、图14、图15所示,根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头1000,其主要包括:加工模块100、力反馈模块200、平衡模块300、导线固定模块400、主轴背板500和主轴固定板600。
96.平衡模块300由导轮模组301、电机模组302、摇臂模组303和轴承模组304组成;导轮模组301通过导轮支架固定螺钉40与力反馈模块200固连为一体,导轮模组301通过压力传感器支架固定螺钉41固定于主轴背板500上,加工模块100通过主轴支架固定螺钉44固定于主轴背板500上,电机模组302通过电机支架固定螺钉50固定于主轴背板500上,轴承模组304通过滚动轴承座固定螺钉37固定于主轴背板500上。
97.摇臂模组303左端与电机模组302的电机输出端通过刚性联轴器3固连,右端插入轴承模组304中滚动轴承5内孔,构成主轴整体,主轴整体通过主轴背板固定螺钉42固定于主轴固定板600上。
98.加工模块100具有使用直线轴承导向连接和双片导向连接两种不同的连接模式;加工模块100自身具有左右移动自由度,其上两种连接模式具有各自独立的上下移动自由度,力反馈模块200具有上下移动自由度,摇臂模组303具有上下摆动自由度。
99.如图1、图2、图3、图9和图11所示,根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,力反馈模块200具有压力传感器连接螺钉7、压力传感器支架8、压力传感器9、铰链连接支架13、铰链连接支架固定螺钉14、铰链框架15、长销16、压缩柔性铰链17、短销18、柔性铰链连接轴19、拉伸柔性铰链20、柔性铰链连接件21、铰链压块固定螺钉47、铰链压块48、铰链框架固定螺钉49。
100.压缩柔性铰链17与铰链框架15通过长销16配合连接,压缩柔性铰链17与柔性铰链连接轴19通过短销18配合连接,拉伸柔性铰链20中孔沿柔性铰链连接轴19螺纹段套入,一对铰链压块48分两侧压紧拉伸柔性铰链20的下侧,使拉伸柔性铰链20四个顶角与铰链框架15的四个立柱端面紧贴,铰链压块固定螺钉47对准铰链压块48、拉伸柔性铰链20上的通孔,并且铰链压块固定螺钉47与铰链框架15立柱上的螺纹孔螺纹配合,柔性铰链连接件21螺纹孔沿柔性铰链连接轴19螺纹段拧入,直至将拉伸柔性铰链20中部平面与柔性铰链连接轴19端部紧贴,即构成复合柔性件;压力传感器9底部与铰链连接支架13通过铰链连接支架固定螺钉14固定连接,并与复合柔性件通过铰链框架固定螺钉49固定连接,压力传感器9顶部与压力传感器支架8通过压力传感器连接螺钉7固定连接,完成力反馈模块200的组装。
101.如图1、图2、图3、图11、图12和图15所示,根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,使用直线轴承导向连接模式的加工模块100包括:主轴支架30、平衡轴模组和直线轴承导向模组,平衡轴模组具有平衡线缆固定螺母22、平衡轴23、纵轴28、顶块24、主轴连接件25、电信号引入螺钉31、夹头32和夹头固定紧定螺钉33;直线轴承导向模组具有缓冲弹簧26、直线轴承27、直线轴承底板29;直线轴承固定螺钉45;直线轴承底板固定螺钉46。
102.力反馈模块200中柔性铰链连接件21下部的凸台与顶块24上方内孔插接配合并使两个端面贴合,主轴连接件25上部凸台与顶块24下方内孔插接配合,且主轴连接件25与顶块24通过胶粘固定连接,主轴连接件25下部内螺纹与纵轴28顶部外螺纹螺纹配合,平衡轴23沿顶块24侧面中部通孔插入顶块24内,通过一组平衡线缆固定螺母22沿平衡轴23左右侧螺纹段拧至平衡轴23上,使平衡轴23与顶块24固定连接,两组平衡线缆固定螺母22相对于平衡轴23的中心对称布置,构成主轴。
103.直线轴承底板29通过直线轴承底板固定螺钉46固定在主轴支架30上,直线轴承27通过直线轴承固定螺钉45固定在直线轴承底板29上,缓冲弹簧26套设在主轴下端,带有缓冲弹簧26的主轴插入直线轴承27内孔内,直至缓冲弹簧26与直线轴承27上端面抵接,夹头32沿纵轴28下端削边轴部分套入,电信号引入螺钉31和夹头固定紧定螺钉33分别沿夹头32左右侧螺纹孔拧入,使夹头32与纵轴28固定连接,实现加工模块100的组装。
104.如图1、图5、图6、图17和图18所示,根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,使用双片导向连接模式的加工模块100,包括:主轴支架30、平衡轴模组和双片导向模组,平衡轴模组具有平衡线缆固定螺母22、平衡轴23、纵轴28、顶块24、主轴连接件25、电信号引入螺钉31、夹头32和夹头固定紧定螺钉33;双片导向模组具有限位块59、导向器固定螺钉60、限位块固定铜柱61和双片导向器62。
105.力反馈模块200中柔性铰链连接件21下部的凸台与顶块24上方内孔插接配合并使两个端面贴合,主轴连接件25上部凸台与顶块24下方内孔插接配合,且主轴连接件25与顶块24通过胶粘固定连接,主轴连接件25下部内螺纹与纵轴28顶部外螺纹螺纹配合,平衡轴23沿顶块24侧面中部通孔插入顶块24内,通过一组平衡线缆固定螺母22沿平衡轴23左右侧螺纹段拧至平衡轴23上,使平衡轴23与顶块24固定连接,两组平衡线缆固定螺母22相对于平衡轴23的中心对称布置,构成主轴。
106.主轴通过双片导向器62内孔插入限位块59,限位块固定铜柱61将限位块59和双片导向器62下片固定在主轴支架30上,双片导向器62上片通过导向器固定螺钉60与限位块固定铜柱61上端螺纹配合,夹头32沿纵轴28下端削边轴部分套入,电信号引入螺钉31和夹头固定紧定螺钉33分别沿夹头32左右侧螺纹孔拧入,使夹头32与纵轴28固定连接,实现加工模块100的组装。
107.需要说明的是,由于使用直线轴承导向连接模式下方具有缓冲弹簧26和直线轴承27上表面支撑,因此主轴受力可通过紧密贴合的顶块24和柔性铰链连接件21端面传递至力反馈模块200,因而主轴与力反馈模块200中柔性铰链连接件21无需固定连接;而使用双片导向连接模式由于无下部支撑,为传递受力,需要使顶块24和柔性铰链连接件21固定连接。
108.如图1、图2、图3和图14所示,根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,导轮模组301具有导轮10、导轮轴11、导轮轴固定螺母12、导轮支架39。导轮10内孔与导轮轴11凸台插接配合,并通过胶粘固定,一导轮轴固定螺母12沿导轮轴11后部螺纹段拧入构成一整体,将该整体的导轮轴11后部螺纹段沿设定距离插入导轮支架39的第一安装槽中,第一安装槽为1型槽,另一导轮轴固定螺母12沿导轮轴螺纹段从导轮支架39的另一侧拧入,将导轮10与导轮轴11整体固定在导轮支架39上,一组导轮模组301内设有两个导轮,另一导轮10的安装方式与上述相同,由此实现导轮模组301单侧组装完成,导轮模组301具有两组,两组导轮模组301为对称结构,另一侧安装方式与上述相同。
109.其中,每组导轮模组301中,两个导轮10的间距可通过导轮轴固定螺母12的松紧在导轮支架39中部的第一安装槽中的位置调节。
110.如图1、图4所示,根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,电机模组302具有电机1、电机支架2、电机固定螺钉58。电机1端部凸台与电机支架2内孔插接配合,直至两者端面紧贴,电机固定螺钉58穿过电机支架2上的螺钉通孔,直至与电机1螺纹配合,实现电机1的固定连接,实现电机模组302的组装。
111.如图1、图2、图4、图7、图16所示,根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,摇臂模组303具有摇臂固定紧定螺钉4、摇臂轴6、滑块固定螺母52、滑块固定垫片53、两个摇臂54、滑块55、滑块连接板56和滑块固定螺钉57。两个摇臂54按预设距离间隔与摇臂轴6套设配合,摇臂固定紧定螺钉4从摇臂54上部螺纹孔拧入摇臂54内,直至摇臂固定紧定螺钉4端部与摇臂轴6上方削边平面贴合,使摇臂54固定在摇臂轴6上,滑块55贴合摇臂54外侧面,滑块55的内孔与摇臂54中的第二安装槽对位,第二安装槽为1型槽,滑块连接板56从上方覆盖滑块55外侧面,并使滑块55和摇臂54上侧面处于同一水平面,滑块固定螺钉57穿过滑块连接板56和滑块55侧面中孔直至伸入摇臂54的内侧,滑块固定螺母52和滑块固定垫片53依次沿滑块固定螺钉57露出于摇臂54内侧的螺纹段与滑块固定螺钉57螺纹配合,使滑块连接板56、滑块55与摇臂54完全贴合,实现摇臂模组303的组装。
112.进一步地,滑块55可通过滑块固定螺母52的松紧在摇臂54的第二安装槽中调节。
113.如图1、图2、图3、图4、图7所示,根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,轴承模组304包括:滚动轴承5、滚动轴承座38;摇臂限位杆51。滚动轴承5沿滚动轴承座38中部沉孔的内孔插入滚动轴承座38内,直至滚动轴承5的右侧端面与轴承座完全贴合,摇臂限位杆51插入滚动轴承座38上的通孔,并且两者通过胶粘固定,实现轴承模组304的组装。
114.如图1、图2、图3、图5、图6和图13所示,根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,导线固定模块400包括:导线固定座34和导线固定座固定螺钉35,加工模块100中主轴支架30左右两侧分别设有导线固定模块400,力反馈模块200中压力传感器支架8顶部设有导线固定模块400,轴承模组304中滚动轴承座38顶部设有导线固定模块400,主轴背板50上设有导线固定模块400。
115.下面参考附图描述根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头的两种平衡模式绕线方式。
116.如图19所示为恒力矩输出模式平衡主轴重力绕线方式,线缆70一端系于平衡轴23两侧对称位置,并由平衡线缆70固定螺母22拧紧固定,线缆70向上引至导轮模组301的内侧导轮10后方,并依次绕过导轮模组301的内侧导轮10上部和外侧导轮10下部,最后由外侧导轮10前侧引出,向上继续绕过滑块55,线缆70将处于滑块中部凹槽中,最后将线缆70另一端通过滑块连接板56下表面和滑块55后部上表面压紧,并向外侧系于滑块固定螺钉57的螺钉头与滑块连接板56间隙中,拧紧滑块固定螺母52时,线缆70将维持拉紧状态。
117.如图20所示为重物垂吊模式平衡主轴重力绕线方式,线缆70一端系于平衡轴23两侧对称位置,并由平衡线缆70固定螺母22拧紧固定,线缆70向上引至导轮模组301的内侧导轮后方,并依次绕过导轮模组301的内侧导轮10和外侧导轮10上部,最后由外侧导轮10前侧引出,向下系于重物上方,重物垂悬时,线缆70将维持拉紧状态。
118.下面参考附图描述根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头的绝缘设计。
119.根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,其绝缘设计包括:使用直线轴承导向连接模式的绝缘设计和使用双片导向连接模式的绝缘设计。
120.如图2、图3、图11、图12和图15所示,根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,使用直线轴承导向连接模式时,顶块24和直线轴承底板29采用绝缘材料。
121.当电信号由电信号引入螺钉31引入主轴时,直线轴承轴27、纵轴28和夹头32带电,直线轴承底板29将直线轴承轴27与主轴支架30隔开,实现轴向向下绝缘;顶块24使柔性铰链连接件21、平衡轴23和主轴连接件25存在间隙,实现轴向向上绝缘;直线轴承27、直线轴承底板固定螺钉46之间存在间隙,夹头32、直线轴承固定螺钉45与主轴支架30内孔互相之间存在间隙,实现径向绝缘,保证加工模块100与力反馈模块200、平衡模块300之间互相绝缘。
122.如图5、图6、图17和图18所示,根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,使用双片导向连接模式时,顶块24、双片导向器62和限位块59采用绝缘材料。
123.当电信号由电信号引入螺钉31引入主轴时,限位块59下端面低于主轴支架30左侧槽下表面,纵轴28运动使夹头32上端面与限位块59下端面重合时,无法直接接触主轴支架30,实现轴向向下绝缘;顶块24使柔性铰链连接件21、平衡轴23和主轴连接件25存在间隙,实现轴向向上绝缘;限位块59下部外径大于夹头32,且主轴支架30下表面的开槽范围大于上表面,实现径向绝缘,保证加工模块100与力反馈模块200、平衡模块300之间互相绝缘。
124.下面参考附图描述根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头的柔性件固定块700的作用。
125.如图21、图22、图23、和图24所示,根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,柔性件固定块700为一单侧开口的盒状对称结构,由后部底板701依次与左右两个侧板702以及上侧两个侧板702、下侧两个侧板702连接。
126.柔性件固定块700沿力反馈模块200中复合柔性件的左/右侧插入,至后部底板701内侧端面与铰链框架15左/右外侧面贴合后,左右两个侧板702的内侧面与铰链框架15前后侧面贴合,左右两个侧板702的下表面与铰链压块48凸出于铰链框架15外侧的凸台部贴合,上侧两个侧板702的上表面与铰链框架15顶部内表面贴合,上侧两个侧板702中部的凹槽卡住压缩柔性铰链与铰链框架15连接处的前后侧,且凹槽的后侧面可以卡住压缩柔性铰链与铰链框架15连接处的左/右侧平面,此时主轴受力无法使复合柔性件发生扭转变形;下侧两个侧板702的下侧面与拉伸柔性铰链20上表面贴合,此时主轴受力无法使复合柔性件发生压缩变形,实现对复合柔性件的保护,便于搬运操作等。
127.下面参考附图描述根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头,加工模块100使用直线轴承导向连接模式向使用双片导向连接模式切换的方式。
128.加工模块100使用直线轴承导向连接模式向使用双片导向连接模式切换的方式包括6个步骤:其中,如图25所示,以使用直线轴承导向连接模式的加工模块100为初始状态。
129.步骤1,如图26所示,将压力传感器支架固定螺钉41拧松,将力反馈模块200移动至上限位,此时柔性铰链连接件21下部凸台与顶块24分离,拧紧压力传感器支架固定螺钉41
使力反馈模块200暂时固定;
130.步骤2,如图27所示,将主轴支架固定螺钉44拧松,将加工模块100由左限位移动至右限位,拧紧主轴支架固定螺钉44使加工模块100固定;
131.步骤3,如图28所示,插入柔性件固定块700保护柔性铰链不受变形,将力反馈模块200中柔性铰链连接件21拧下;
132.步骤4,如图29所示,将使用双片导向连接模式通过双片导向器62内孔插入限位块59,并从加工模块100左侧插入开口槽中,通过限位块固定铜柱61同时将限位块59、双片导向器62下片固定在主轴支架30上,双片导向器62上片通过导向器固定螺钉60外螺纹拧合至限位块固定铜柱61上端固定;
133.步骤5,如图30所示,将压力传感器支架固定螺钉41拧松,将力反馈模块200移动至上限位,将双片导向连接模式的柔性铰链连接件21螺纹孔沿柔性铰链连接轴19螺纹段拧入,至将拉伸柔性铰链20中部平面与柔性铰链连接轴19端部紧贴,拧紧压力传感器支架固定螺钉41使力反馈模块200固定;
134.步骤6,如图31所示,夹头32沿纵轴28下端削边轴部分套入,电信号引入螺钉31和夹头固定紧定螺钉33分别沿夹头32左右侧螺纹孔拧入,使夹头32与纵轴28固定连接,由此实现使用双片导向连接模式的加工模块100的切换。
135.其中,加工模块100使用直线轴承导向连接模式向使用双片导向连接模式切换的方式为可逆操作。
136.根据本发明实施例的电化学放电加工用柔性力反馈控制主轴头1000的其他构成以及操作对于本领域普通技术人员而言都是已知的,这里不再详细描述。在本发明的描述中,“第一特征”、“第二特征”可以包括一个或者更多个该特征。其中,上下方向、左右方向和前后方向以图示的上下方向、左右方向和前后方向为准。
137.在本发明的描述中,除非另有明确的规定和限定,第一特征在第二特征“之上”或“之下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。
138.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
139.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1