一种智能柔性装配用关节机器人的工艺方法与流程
本发明涉及智能装配,更具体地说,涉及一种智能柔性装配用关节机器人的工艺方法。
背景技术:
1、随着社会发展,工业自动化进程的不断提升,自动化装配技术需求越来越大;现有的装配大部分仍然由人工完成,人工装配效率低下,成本高昂,可靠性不可控;现有的装配机器人只能从一个或几个方向对工件进行装配,造成总体装配步骤较多,装配系统复杂,效率较低且装配产品可适应性差,且柔性化不足。
2、鉴于此,我司根据“自动翻料数控设备关节机器人”设计出一种智能装配工艺方法,引用我司以前开发并在专利申请中的“自动翻料数控设备关节机器人”①所用的关节机器人、物料中转平台和夹爪抓取机构等设备机构,以及“装配面自动翻转、定位面旋转和夹爪抓取工艺方法”可实现对产品的自动上下料、工件不同装配方向转换和工件装配等功能。
技术实现思路
1、1.要解决的技术问题
2、针对现有技术中存在的问题,本发明的目的在于提供一种智能柔性装配用关节机器人的工艺方法,本方案将一个产品的整个装配工艺细分化、独立为一个或多个装配模块一、装配模块二,通过装配输送线和物料输送线,联通各个独立的装配模块,完成整个产品的装配,且每个装配工艺工序为单独的一个装配模块,可独立完成改装配工作,可根据产品的装配工艺自由搭配,便于产品的升级替换,实现装配工序的自动化,完成工件多个朝向的上料和装配要求,满足不同产品装配的柔性要求,减少人工,提升产品的装配效率和合格率,通过增加、减少或替换独立装配模块和工作专机适应不同的装配工艺,实现装配产线柔性化,适应各种产品的装配,初期设备投入不大,使用成本低,通用性能好,切换产品快,可柔性组合装配线体及工艺流程。
3、2.技术方案
4、为解决上述问题,本发明采用如下的技术方案。
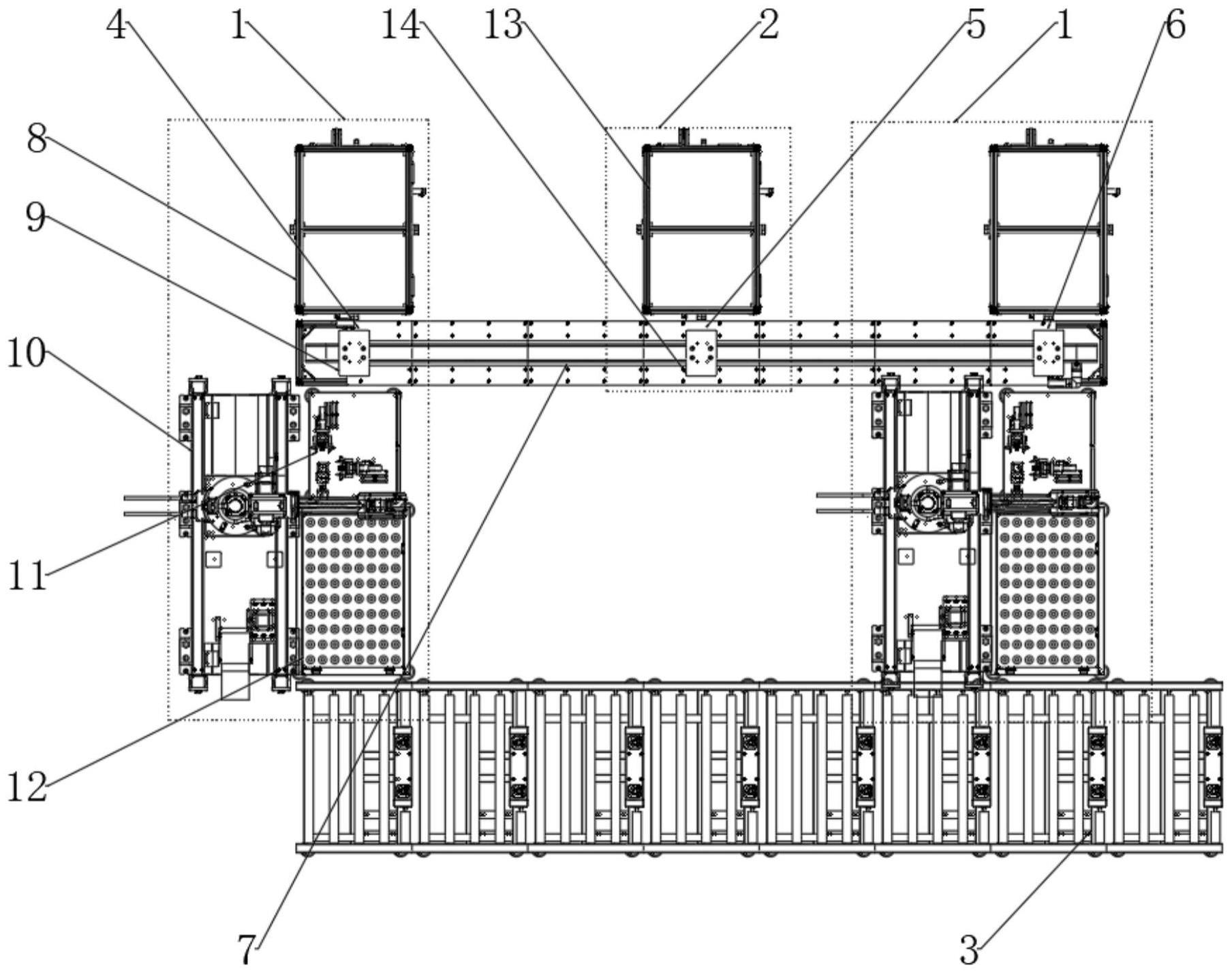
5、一种智能柔性装配用关节机器人的工艺方法,包括两个装配模块一、装配模块二和物料输送线,所述装配模块一、装配模块二和物料输送线组合成一条自动化装配线,所述装配模块一和装配模块二为交错式的独立设置,位于左侧的所述装配模块一上设有工位一,且位于右侧的所述装配模块一上设有工位三,所述装配模块二上设有工位二,本方案将一个产品的整个装配工艺细分化、独立为一个或多个装配模块一、装配模块二,通过装配输送线和物料输送线,联通各个独立的装配模块,完成整个产品的装配,且每个装配工艺工序为单独的一个装配模块,可独立完成改装配工作,可根据产品的装配工艺自由搭配,便于产品的升级替换,实现装配工序的自动化,完成工件多个朝向的上料和装配要求,满足不同产品装配的柔性要求,减少人工,提升产品的装配效率和合格率,通过增加、减少或替换独立装配模块和工作专机适应不同的装配工艺,实现装配产线柔性化,适应各种产品的装配,初期设备投入不大,使用成本低,通用性能好,切换产品快,可柔性组合装配线体及工艺流程。
6、进一步的,所述装配模块一包括第一工作专机、第一装配工作台、关节机器人、中转平台和物料平台,所述装配模块二包括第二工作专机和第二装配平台,装配模块一可通过关节机器人完成工件的自动上下料,通过中转平台完成工件装配面的翻转、定位面的旋转,通过第一工作专机完成工件的装配工艺等功能,装配模块二通过第二工作专机完成工件的装配工艺。
7、进一步的,所述第一工作专机和第二工作专机分为两种,且其分别为通用型工作专机或专用型工作专机,通用型工作专机,如锁螺丝机、点胶机、焊接机等;专用型工作专机,如一个实施例:气缸装配,需要的组装密封圈的设备机构,不同的工艺需要不同的工作专机。
8、进一步的,所述物料输送线包括输送线、顶升移载机构和阻挡器,所述阻挡器安装在输送线上,且顶升移载机构安装在输送线的下端,物料输送线通过输送线、顶升移载机构和阻挡器对物料进行稳定输送,且输送线种类可根据实际需要而变化。
9、进一步的,所述第一装配工作台和第二装配平台均包括装配台、导向轨道、滑块和装配工作台支架,所述导向轨道安装在装配工作台支架上,所述滑块安装在导向轨道上,并与其滑动连接,所述装配台安装在滑块上,第一装配工作台和第二装配平台通过装配台、导向轨道、滑块和装配工作台支架的相互配合,可以实现用于放置工件,同时将装配好的工件输送至下一工位。
10、进一步的,多个所述第一装配工作台和第二装配平台相互固定连接,并组成装配输送线,装配输送线实现工件的输送流通,联通各个独立的装配模块,完成整个产品的装配。
11、进一步的,所述关节机器人包括关节机器人本体、夹爪抓取机构和地轨,所述关节机器人本体安装在地轨上,且夹爪抓取机构安装在关节机器人本体上,所述夹爪抓取机构的外端安装有三个夹爪,关节机器人用于将物料平台或中转平台或第一装配工作台上的工件取出放置到固定位置上,如第一装配工作台或中转平台或物料平台,且夹爪抓取机构上夹爪尺寸可调节,增强使用效果,并且夹爪数量可根据要求配置,可为单爪、两个夹爪、三个夹爪、四个夹爪或更多,同时夹爪可以成90度直角分布,也可以成平面分布。
12、进一步的,所述中转平台包括第一伸缩机构、第一旋转机构、第一手指夹爪、第二手指夹爪、第二伸缩机构、第二旋转机构、工件托盘、第三旋转机构、第三伸缩机构和中转平台支架,所述工件托盘安装在第三旋转机构上,所述第一手指夹爪安装在第一旋转机构外端上,且第二手指夹爪安装在第二旋转机构外端上,中转平台用于翻转工件装配面、旋转定位面,通过第一旋转机构或第二旋转机构上的第一手指夹爪或第二手指夹爪抓取工件后,可根据需求对工件的装配面进行翻转,并配合第三旋转机构对放置在工件托盘的工件进行旋转,保证工件装配时的装配面及定位面。
13、进一步的,所述物料平台包括物料托盘、移载机和物料平台支架,所述移载机安装在物料托盘和物料平台支架之间,物料平台上的物料托盘用于放置工件,工件种类及数量不定,可通过编号进行排列和分布。
14、3.有益效果
15、相比于现有技术,本发明的优点在于:
16、(1)本方案将一个产品的整个装配工艺细分化、独立为一个或多个装配模块一、装配模块二,通过装配输送线和物料输送线,联通各个独立的装配模块,完成整个产品的装配,且每个装配工艺工序为单独的一个装配模块,可独立完成改装配工作,可根据产品的装配工艺自由搭配,便于产品的升级替换,实现装配工序的自动化,完成工件多个朝向的上料和装配要求,满足不同产品装配的柔性要求,减少人工,提升产品的装配效率和合格率,通过增加、减少或替换独立装配模块和工作专机适应不同的装配工艺,实现装配产线柔性化,适应各种产品的装配,初期设备投入不大,使用成本低,通用性能好,切换产品快,可柔性组合装配线体及工艺流程。
17、(2)装配模块一包括第一工作专机、第一装配工作台、关节机器人、中转平台和物料平台,装配模块二包括第二工作专机和第二装配平台,装配模块一可通过关节机器人完成工件的自动上下料,通过中转平台完成工件装配面的翻转、定位面的旋转,通过第一工作专机完成工件的装配工艺等功能,装配模块二通过第二工作专机完成工件的装配工艺。
18、(3)第一工作专机和第二工作专机分为两种,且其分别为通用型工作专机或专用型工作专机,通用型工作专机,如锁螺丝机、点胶机、焊接机等;专用型工作专机,如一个实施例:气缸装配,需要的组装密封圈的设备机构,不同的工艺需要不同的工作专机。
19、(4)物料输送线包括输送线、顶升移载机构和阻挡器,阻挡器安装在输送线上,且顶升移载机构安装在输送线的下端,物料输送线通过输送线、顶升移载机构和阻挡器对物料进行稳定输送,且输送线种类可根据实际需要而变化。
20、(5)第一装配工作台和第二装配平台均包括装配台、导向轨道、滑块和装配工作台支架,导向轨道安装在装配工作台支架上,滑块安装在导向轨道上,并与其滑动连接,装配台安装在滑块上,第一装配工作台和第二装配平台通过装配台、导向轨道、滑块和装配工作台支架的相互配合,可以实现用于放置工件,同时将装配好的工件输送至下一工位。
21、(6)多个第一装配工作台和第二装配平台相互固定连接,并组成装配输送线,装配输送线实现工件的输送流通,联通各个独立的装配模块,完成整个产品的装配。
22、(7)关节机器人包括关节机器人本体、夹爪抓取机构和地轨,关节机器人本体安装在地轨上,且夹爪抓取机构安装在关节机器人本体上,夹爪抓取机构的外端安装有三个夹爪,关节机器人用于将物料平台或中转平台或第一装配工作台上的工件取出放置到固定位置上,如第一装配工作台或中转平台或物料平台,且夹爪抓取机构上夹爪尺寸可调节,增强使用效果,并且夹爪数量可根据要求配置,可为单爪、两个夹爪、三个夹爪、四个夹爪或更多,同时夹爪可以成90度直角分布,也可以成平面分布。
23、(8)中转平台包括第一伸缩机构、第一旋转机构、第一手指夹爪、第二手指夹爪、第二伸缩机构、第二旋转机构、工件托盘、第三旋转机构、第三伸缩机构和中转平台支架,工件托盘安装在第三旋转机构上,第一手指夹爪安装在第一旋转机构外端上,且第二手指夹爪安装在第二旋转机构外端上,中转平台用于翻转工件装配面、旋转定位面,通过第一旋转机构或第二旋转机构上的第一手指夹爪或第二手指夹爪抓取工件后,可根据需求对工件的装配面进行翻转,并配合第三旋转机构对放置在工件托盘的工件进行旋转,保证工件装配时的装配面及定位面。
24、(9)物料平台包括物料托盘、移载机和物料平台支架,移载机安装在物料托盘和物料平台支架之间,物料平台上的物料托盘用于放置工件,工件种类及数量不定,可通过编号进行排列和分布。
- 还没有人留言评论。精彩留言会获得点赞!