用于控制机器人系统的方法和电子设备与流程
本公开的实施例总体上涉及一种机器人系统,更特别地涉及一种用于控制机器人系统以组装公共汽车的车顶和车身框架的方法和电子设备。
背景技术:
1、公共汽车是一种大型机动车辆,其被设计为运载比普通汽车多得多的乘客。由于公共汽车的尺寸较大,在其制造和组装期间具有与轿车有很大不同的工艺。具体地,在公共汽车的组装期间,通常由波纹铁制成的车顶例如通过焊接、铆接或粘接而被组装在车身框架的顶部上,以形成公共汽车车身。车顶与车身框架之间的连接直接影响公共汽车车身的表面质量和结构强度。
2、目前,大多数公共汽车都是手动组装的。例如,车顶和公共汽车框架通常由操作员手动焊接。一方面,操作员需要具有经验才能获得更好的焊接质量。这对公司的用工成本来说是一个挑战。另一方面,焊接质量完全取决于操作员的个人水平,个体水平参差不齐,从而导致焊接质量的一致性较差。此外,手动焊接劳动强度大、效率低、容易发生安全事故。
3、此外,随着国内劳动力成本的逐渐增加,低端劳动密集型工人越来越少。制造商迫切需要提高公共汽车的自动化生产程度。
技术实现思路
1、本公开的实施例提供了一种用于控制机器人系统自动组装公共汽车的方法及电子设备。
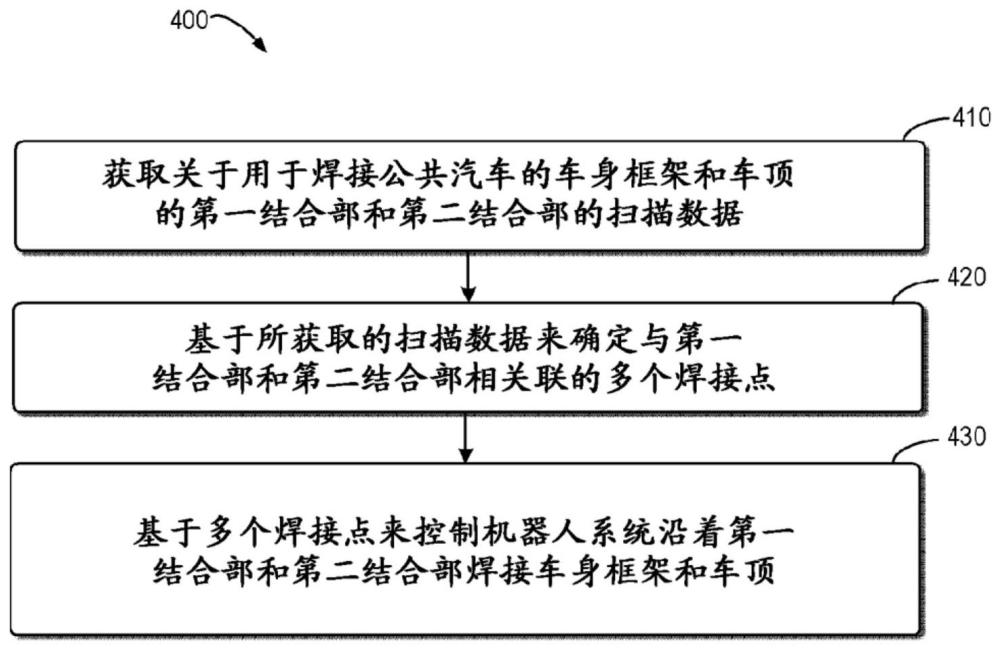
2、在第一方面,提供了一种控制机器人系统的方法。该方法包括获取关于用于焊接公共汽车的车身框架和车顶的第一接合部和第二接合部的扫描数据,第一接合部和第二接合部被布置在公共汽车的相对侧上;基于所获取的扫描数据来确定与第一接合部和第二接合部相关联的多个焊接点;并且基于多个焊接点来控制机器人系统沿着第一接合部和第二接合部焊接车身框架和车顶。
3、利用根据本公开的实施例的方法,可以自动焊接公共汽车的车顶和车身框架。与操作员的焊接过程相比,消除了人为因素所造成的误差,这样能够显著提高焊接质量和焊接一致性。此外,该方法可以被用来在生产线上自动组装各种类型的公共汽车,这样能够显著提高生产线的生产效率。
4、在一些实施例中,获取关于接合部的扫描数据包括获取与公共汽车的公共汽车类型相关的车辆模型数据;根据车辆模型数据来确定扫描轨迹;并且使传感器沿着扫描轨迹移动以获取扫描数据。以这种方式,可以根据不同车型来调整扫描轨迹,从而提高扫描数据的准确性和扫描效率。
5、在一些实施例中,确定多个焊接点包括根据扫描数据来确定与第一接合部相关联的第一特征区域和与第二接合部相关联的第二特征区域;根据第一特征区域和第二特征区域来确定包括与第一特征区域相关的多个第一特征点和与第二特征区域相关的多个第二特征点的特征数据集;并且根据特征数据集来确定多个焊接点。以这种方式,可以根据每个公共汽车的差异来确定对应的焊接点,这样能够提高焊接的可靠性。
6、在一些实施例中,确定多个焊接点还包括对特征数据集进行滤波以获取包括滤波后的多个第一特征点和滤波后的多个第二特征点的滤波后的特征数据集;通过拟合滤波后的多个第一特征点来确定第一折线,并通过拟合滤波后的多个第二特征点来确定第二折线;通过沿着第一折线和第二折线提取各点来确定多个理论焊接点;并且根据多个理论焊接点来确定多个焊接点。
7、在一些实施例中,确定多个焊接点还包括获取与公共汽车类型相关的车辆模型数据;根据车辆模型数据来确定多个理论焊接点中的每个与对应的焊接点之间的偏移;并且根据多个理论焊接点和偏移来确定多个焊接点。
8、在一些实施例中,确定第一特征区域和第二特征区域包括根据扫描数据来确定与公共汽车的前部、后部和车身部分相关的维度数据和形状数据;并且基于所确定的维度数据和形状数据来确定第一特征区域和第二特征区域。以这种方式,能够更加准确地确定特征区域。
9、在一些实施例中,多个第一特征点是第一特征区域的至少一个边缘上的间隔第一预定距离的各点,并且多个第二特征点是第二特征区域的至少一个边缘上的间隔第二预定距离的各点。以这种方式,能够更加容易且准确地确定特征点。
10、在一些实施例中,控制机器人系统以焊接公共汽车的车身框架和车顶包括获取与公共汽车的公共汽车类型相关的车辆模型数据;根据车辆模型数据来获取焊接参数;并且还根据焊接参数来协同地控制机器人系统的第一机器人沿着第一接合部进行焊接以及机器人系统的第二机器人沿着第二接合部进行焊接。以这种方式,能够针对不同的公共汽车类型选择对应的焊接参数以用于焊接,从而提高焊接的可靠性。
11、在第二方面,提供了一种电子设备。电子设备包括至少一个处理单元;以及至少一个存储器,其耦合到至少一个处理单元并存储指令,当指令由至少一个处理单元执行时使至少一个处理单元获取关于用于焊接公共汽车的车身框架和车顶的第一接合部和第二接合部的扫描数据,第一接合部和第二接合部被布置在公共汽车的相对侧上;基于所获取的扫描数据来确定与第一接合部和第二接合部相关联的多个焊接点;并且基于多个焊接点来控制机器人系统沿着第一接合部和第二接合部焊接车身框架和车顶。
12、在一些实施例中,至少一个处理单元还被配置为获取与公共汽车的公共汽车类型相关的车辆模型数据;根据车辆模型数据来确定扫描轨迹;并且使传感器沿着扫描轨迹移动以获取扫描数据。
13、在一些实施例中,至少一个处理单元还被配置为根据扫描数据来确定与第一接合部相关联的第一特征区域和与第二接合部相关联的第二特征区域;根据第一特征区域和第二特征区域来确定包括与第一特征区域相关的多个第一特征点和与第二特征区域相关的多个第二特征点的特征数据集;并且根据特征数据集来确定多个焊接点。
14、在一些实施例中,至少一个处理单元还被配置为对特征数据集进行滤波以获取包括滤波后的多个第一特征点和滤波后的多个第二特征点的滤波后的特征数据集;通过拟合滤波后的多个第一特征点来确定第一折线,并通过拟合滤波后的多个第二特征点来确定第二折线;通过沿着第一折线和第二折线提取各点来确定多个理论焊接点;并且根据多个理论焊接点来确定多个焊接点。
15、在一些实施例中,至少一个处理单元还被配置为获取与公共汽车类型相关的车辆模型数据;根据车辆模型数据来确定多个理论焊接点中的每个与对应的焊接点之间的偏移;并且根据多个理论焊接点和偏移来确定多个焊接点。
16、在一些实施例中,至少一个处理单元还被配置为根据扫描数据来确定与公共汽车的前部、后部和车身部分相关的维度数据和形状数据;并且基于所确定的维度数据和形状数据来确定第一特征区域和第二特征区域。
17、在一些实施例中,多个第一特征点是第一特征区域的至少一个边缘上的间隔第一预定距离的各点,并且多个第二特征点是第二特征区域的至少一个边缘上的间隔第二预定距离的各点。
18、在一些实施例中,至少一个处理单元还被配置为获取与公共汽车的公共汽车类型相关的车辆模型数据;根据车辆模型数据来获取焊接参数;并且还根据焊接参数来协同地控制机器人系统的第一机器人沿着第一接合部进行焊接以及机器人系统的第二机器人沿着第二接合部进行焊接。
19、在第三方面,提供了一种计算机可读存储介质。该计算机可读存储介质在其上存储有计算机可读程序指令,当该计算机可读程序指令被处理单元执行时使该处理单元执行上述第一方面中提到的方法。
20、应当理解,
技术实现要素:
既不旨在识别本公开的实施例的关键或基本特征,也不旨在被用来限制本公开的范围。通过下面的描述,本公开的其他特征将变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!