一种铸件自动打磨高刚性机器人的制作方法
1.本实用新型涉及铸件打磨技术领域,具体为一种铸件自动打磨高刚性机器人。
背景技术:
2.随着科技的发展,铸造后处理打磨越来越受到重视,随着科技的进步,大量的铸件去除飞边、毛刺及铸件表面的打磨、抛光等工作逐渐由人工打磨转向自动化打磨。
3.人工打磨时,需要先将工件夹持好,然后在手持打磨设备对工件进行打磨,人工手动打磨存在以下不足:第一、打磨速度慢,同时长时间手持设备易产生疲劳,劳动强度大;第二、人工手持设备不能长时间保持稳定,使得设备与待加工工件之间的距离容易发生变化,导致打磨时的进给量不同,从而导致打磨的精度降低,易损坏工件,降低了产品的合格率,增加了成本。
技术实现要素:
4.本实用新型的目是针对背景技术中存在的问题,提出一种可以自动对工件进行打磨,打磨速度块、精度低,不易损坏工件,提高了工作的效率的铸件自动打磨高刚性机器人。
5.本实用新型的技术方案:一种铸件自动打磨高刚性机器人,包括固定组件和打磨组件;
6.固定组件上设有固定工件的夹持组件,打磨组件设置在固定组件上,且固定组件上设有驱动打磨组件移动的直线调节机构;
7.其中,固定组件包括固定座、固定板、支撑柱、压盘和连接件;支撑柱设置在固定座上,固定板设置在固定座上并位于支撑柱的一侧,且固定板上设有电动伸缩杆a;压盘通过连接件转动设置在电动伸缩杆a上并朝向支撑柱;
8.夹持组件包括三爪卡盘、连接杆、夹持杆、设备台、活动台和电机;三爪卡盘设置在支撑柱上,设备台设置在三爪卡盘上,且设备台上设有电机;活动台转动设置在设备台上并与电机的转动轴连接;连接杆设置在三爪卡盘上的调节滑块上,夹持杆设置在连接杆上,且夹持杆上设有抵住工件的压块。
9.优选的,设备台和活动台之间设有滚珠。
10.优选的,滚珠的数目为多组并环形阵列分布在设备台上。
11.优选的,夹持杆包括夹持杆主体、伸缩件、限位件、弹簧a和弹簧b;夹持杆主体设置在连接杆上,且夹持杆主体上设有限位孔;弹簧a设置在夹持杆主体上,伸缩件滑动设置在夹持杆主体上抵住弹簧a;弹簧b设置在伸缩件上;限位件滑动设在伸缩件上并抵住弹簧b,且限位件伸进夹持杆主体上的限位孔内。
12.优选的,夹持杆主体上的限位块为多组并等距分布。
13.优选的,打磨组件包括安装板、安装件和打磨头;安装板设置在直线调节机构上并与固定座相贴,且安装板上设有电动伸缩杆b;安装件设置在电动伸缩杆b的伸缩端,打磨头转动设置在安装件上,且安装件上设有调节打磨头倾斜角度的角度调节旋钮。
14.与现有技术相比,本实用新型具有如下有益的技术效果:
15.1、先将工件放置到活动台上,然后通过调节三爪卡盘带动夹持杆将工件固定并使其轴心与活动台的轴心对其;之后启动固定板上的电动伸缩杆a推动压盘抵住工件并压紧,随后再次调节三爪卡盘将夹持杆上的压块与工件脱离;之后通过打磨组件对工件侧面进行打磨;打磨时,启动设备台上的电机带动活动台和工件转动,设置在活动台和设备台之间的滚珠降低转动时的摩擦;直线调节机构带动安装板移动,使得打磨头慢慢靠近工件,同时电动伸缩杆b带动打磨头上下移动配合打磨;当需要对工件的其他面进行打磨时,通过角度调节旋钮调节打磨头的角度,从而实现不同角度的打磨;本实用新型可以自动对工件进行打磨,打磨速度块、精度低,不易损坏工件,提高了工作的效率;
16.2、通过当需要降低压块的高度时,按压限位件并压缩弹簧b,然后按压伸缩件并挤压弹簧a,将其缩回夹持杆主体内;当需要升高压块时,按压限位件并压缩弹簧b,在弹簧a作用下将伸缩件弹出;即可实现,方便对不同高度的工件进行夹持,适用范围广。
附图说明
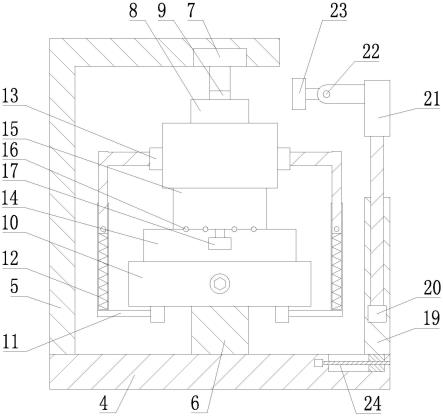
17.图1为本实用新型一种实施例结构示意图;
18.图2为图1的剖视图;
19.图3为图1的俯视图;
20.图4为夹持杆的结构示意图。
21.附图标记:1、固定组件;2、夹持组件;3、打磨组件;4、固定座;5、固定板;6、支撑柱;7、电动伸缩杆a;8、压盘;9、连接件;10、三爪卡盘;11、连接杆;12、夹持杆;121、夹持杆主体;122、伸缩件;123、限位件;124、弹簧a;125、弹簧b;13、压块;14、设备台;15、活动台;16、滚珠;17、电机;18、工件;19、安装板;20、电动伸缩杆b;21、安装件;22、角度调节旋钮;23、打磨头;24、直线调节机构。
具体实施方式
22.实施例一
23.本实用新型提出的一种铸件自动打磨高刚性机器人,包括固定组件1和打磨组件3;
24.如图1所示,固定组件1上设有固定工件的夹持组件2,打磨组件3设置在固定组件1上,且固定组件1上设有驱动打磨组件3移动的直线调节机构24;
25.如图2-3所示,固定组件1包括固定座4、固定板5、支撑柱6、压盘8和连接件9;支撑柱6设置在固定座4上,固定板5设置在固定座4上并位于支撑柱6的一侧,且固定板5上设有电动伸缩杆a7;压盘8通过连接件9转动设置在电动伸缩杆a7上并朝向支撑柱6;
26.夹持组件2包括三爪卡盘10、连接杆11、夹持杆12、设备台14、活动台 15和电机17;三爪卡盘10设置在支撑柱6上,设备台14设置在三爪卡盘10 上,且设备台14上设有电机17;活动台15转动设置在设备台14上并与电机 17的转动轴连接;连接杆11设置在三爪卡盘10上的调节滑块上,夹持杆12设置在连接杆11上,且夹持杆12上设有抵住工件的压块13;设备台14和活动台 15之间设有滚珠16;滚珠16的数目为多组并环形阵列分布在设备台14上;打磨组件3包括安装板19、安装件21和打磨头23;安装板19设置在直线调节机构24上并与固定
座4相贴,且安装板19上设有电动伸缩杆b20;安装件21设置在电动伸缩杆b20的伸缩端,打磨头23转动设置在安装件21上,且安装件 21上设有调节打磨头23倾斜角度的角度调节旋钮22。
27.本实施例中,打磨时,先将工件放置到活动台15上,然后通过调节三爪卡盘带动夹持杆12将工件固定并使其轴心与活动台15的轴心对其;之后启动固定板5上的电动伸缩杆a7推动压盘8抵住工件并压紧,随后再次调节三爪卡盘 10将夹持杆12上的压块13与工件脱离;之后通过打磨组件3对工件侧面进行打磨;打磨时,启动设备台14上的电机17带动活动台15和工件转动,设置在活动台15和设备台14之间的滚珠16降低转动时的摩擦;直线调节机构24带动安装板19移动,使得打磨头23慢慢靠近工件,同时电动伸缩杆b20带动打磨头23上下移动配合打磨;当需要对工件的其他面进行打磨时,通过角度调节旋钮22调节打磨头23的角度,从而实现不同角度的打磨;本实用新型可以自动对工件进行打磨,打磨速度块、精度低,不易损坏工件,提高了工作的效率。
28.实施例二
29.本实用新型提出的一种铸件自动打磨高刚性机器人,相较于实施例一,如图4所示,本实施例区别在于,夹持杆12包括夹持杆主体121、伸缩件122、限位件123、弹簧a124和弹簧b125;夹持杆主体121设置在连接杆11上,且夹持杆主体121上设有限位孔;弹簧a124设置在夹持杆主体121上,伸缩件122 滑动设置在夹持杆主体121上抵住弹簧a124;弹簧b125设置在伸缩件122上;限位件123滑动设在伸缩件122上并抵住弹簧b125,且限位件123伸进夹持杆主体121上的限位孔内;夹持杆主体121上的限位块为多组并等距分布。
30.本实施例中,通过当需要降低压块13的高度时,按压限位件123并压缩弹簧b125,然后按压伸缩件122并挤压弹簧a124,将其缩回夹持杆主体121内;当需要升高压块13时,按压限位件123并压缩弹簧b125,在弹簧a124作用下将伸缩件122弹出;即可实现,方便对不同高度的工件进行夹持,适用范围广。
31.上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本实用新型宗旨的前提下还可以作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1