车辆警报装置的制作方法
1.本发明涉及一种在与物体之间的距离为阈值距离以下的情况下进行警报的车辆警报装置。
背景技术:
2.现有技术中,已知一种在车辆与物体的位置关系满足警报条件的情况下进行警报的车辆警报装置。这种车辆警报装置之一(以下,称为“现有装置”)在物体与车辆之间的距离(物体距离)比连续声音开始距离长且在输出开始距离以下的情况下,发出断续声音模式的警报声,在物体距离为连续声音开始距离以下的情况下,发出连续声音模式的警报声(例如,参照专利文献1)。
3.专利文献1:日本特开2019-32744号公报
技术实现要素:
4.有时即使物体距离相对较短,车辆与该物体碰撞的可能性也较低。无论碰撞的可能性是高还是低,只要物体距离在连续声音开始距离以下,现有装置就发出比断续声音模式警报级别更高的连续声音模式的警报声。如果即使与物体碰撞的可能性低也进行警报级别高的警报时,则驾驶员很可能会对该警报产生厌烦感。
5.本发明是为了应对前述课题而完成的。即,本发明的目的之一是,提供一种能够仅在与物体碰撞的可能性相对较高的情况下进行警报级别高的警报的车辆警报装置。
6.本发明的车辆警报装置(以下,称为“本发明装置”)具备:车速传感器(26),其检测车辆的速度即车速;转向角传感器(22),其检测所述车辆的转向角;检测传感器(30),其检测与存在于规定检测区域的物体有关的信息;以及控制部(10、50、60、90),其对所述车辆的驾驶员进行警报。
7.所述控制部构成为:获取与所述检测传感器检测出的所述物体有关的信息作为物体信息,基于该获取到的物体信息获取所述物体与所述车辆之间的距离作为物体距离,在所述物体距离为阈值物体距离以下的情况下(步骤720中为“是”),基于所述车速以及所述转向角推定所述车辆的预测路线(步骤725),在基于所述预测路线判定为存在所述车辆与所述物体碰撞的可能性的情况下(步骤735中为“是”),计算在所述车辆与所述物体碰撞之前或者所述车辆最接近所述物体之前的期间所述车辆沿着所述预测路线移动的距离,作为碰撞距离(步骤750),在所述碰撞距离大于阈值碰撞距离的情况下(步骤735中为“否”或者步骤755中为“否”),进行第一警报(步骤825、步骤835、步骤915),在所述碰撞距离为阈值碰撞距离以下的情况下(步骤755中为“是”),进行与所述第一警报相比引起所述驾驶员的注意的警报级别更高的第二警报(步骤815、步骤840、步骤
910)。
8.由此,由于在碰撞距离为阈值碰撞距离以下的高级别警报条件成立的情况下,进行与第一警报相比警报级别更高的第二警报,因此仅在碰撞可能性高的情况下进行第二警报。结果,仅在碰撞可能性高时进行第二警报,从而能够降低驾驶员对第二警报产生厌烦感的可能性。
9.本发明的一个方面还具备:照相机传感器(40),其拍摄所述车辆周边的风景而获取图像;以及显示器(50),其显示作为所述车辆周边的风景的图像的车辆周边图像,所述控制部构成为:获取由所述照相机传感器获取的图像的数据作为图像数据,基于该获取的图像数据生成所述车辆周边图像,将该生成的车辆周边图像显示在所述显示器上,通过在所述车辆周边图像中与所述物体距离对应的位置处将第一警报显示要素叠加于所述车辆周边图像而显示在所述显示器上,从而进行所述第一警报(步骤825、步骤835),通过在所述车辆周边图像中与所述物体距离对应的位置处将第二警报显示要素(420)叠加于所述车辆周边图像而显示在所述显示器上,从而进行所述第二警报(步骤815、步骤840),所述第二警报显示要素与所述第一警报显示要素相比所述警报级别更高。
10.由此,驾驶员通过视觉确认叠加在周边图像上显示的警报显示要素,能够识别到需要注意的物体的距离以及该物体的碰撞可能性是高还是低。
11.本发明的一个方面还具备:发出警报声的扬声器(60),所述控制部构成为:通过使第一模式的警报声从所述扬声器发出而进行所述第一警报(步骤915),通过使与所述第一模式相比所述警报级别更高的第二模式的警报声从所述扬声器发出而进行所述第二警报(步骤910)。
12.由此,驾驶员能够通过警报声来识别物体的碰撞可能性是高还是低。
13.另外,在上述说明中,为了帮助理解发明,对于与后述实施方式对应的发明的构成,通过括号添加该实施方式中使用的名称和/或标号。但是,发明的各个构成要素不限于由所述名称和/或标号规定的实施方式。本发明的其它目的、其它特征及随之而来的有益效果,能够基于参照以下附图进行记述的本发明的实施方式的说明而容易理解。
附图说明
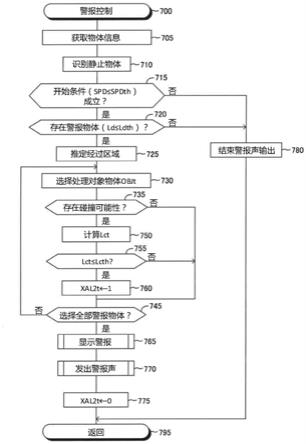
14.图1是本发明的实施方式涉及的车辆警报装置的示意性系统构成图。图2是示出了声纳传感器装置的配置以及检测范围的图。图3是示出了照相机传感器装置的配置以及拍摄范围的图。图4是显示在显示器上的俯瞰图像的说明图。图5是车辆与物体的位置关系的说明图。图6是计算碰撞距离的处理的说明图。图7是示出了图1所示的ecu的cpu所执行的例程的流程图。图8是示出了图7所示的例程的警报显示处理中cpu所执行的例程的流程图。
图9是示出了图7所示的例程的发出警报声处理中cpu所执行的例程的流程图。
具体实施方式
15.以下,参照附图,对本发明的实施方式涉及的车辆警报装置进行说明。图1示出了本发明的实施方式涉及的车辆警报装置10以及应用了该车辆警报装置10的车辆va。
16.如图1所示,车辆警报装置10具备ecu90。ecu是电子控制单元的缩写。ecu90具备微型计算机作为主要部分。微型计算机包括cpu、rom、ram、非易失性存储器以及接口等。cpu通过执行存储在rom中的指令或程序或例程来实现各种功能。
17.车辆va搭载有车辆驱动力产生装置11、制动装置12以及转向装置13。车辆驱动力产生装置11是用于产生使车辆va行驶的驱动力并将该驱动力施加给车辆va的驱动轮的装置。车辆驱动力产生装置11例如为内燃机、电动发动机等。制动装置12是用于将制动车辆va的制动力施加给车辆va的车轮的装置。转向装置13是用于将使车辆va转向的转向扭矩施加给车辆va的转向轮的装置。
18.车辆驱动力产生装置11、制动装置12以及转向装置13与ecu90电连接。ecu90通过控制车辆驱动力产生装置11的工作而控制被施加到车辆va的驱动轮的驱动力。ecu90通过控制制动装置12的工作而控制被施加到车辆va的车轮的制动力。ecu90通过控制转向装置13的工作而控制被施加到车辆va的转向轮的转向扭矩。
19.<传感器等>车辆警报装置10具备:转向角传感器22、转向扭矩传感器24、车速传感器26、声纳传感器装置30、照相机传感器装置40、显示器50以及扬声器60。
20.转向角传感器22与ecu90电连接。ecu90经由转向角传感器22检测手柄14相对于中立位置的旋转角度θst,并将其获取为转向角θst。设中立位置为“0
°”
,当手柄14从中立位置向左侧旋转时,转向角θst为正值,当手柄14从中立位置向右侧旋转时,转向角θst为负值。
21.转向扭矩传感器24与ecu90电连接。ecu90经由转向扭矩传感器24检测从驾驶员输入到转向轴15的扭矩tqst,并将其获取为转向扭矩tqst。
22.ecu90控制转向装置13的工作,使得与获取到的转向角θst以及转向扭矩tqst对应的转向扭矩被施加到车辆va的转向轮。
23.车速传感器26与ecu90电连接。ecu90经由车速传感器26检测车辆va的各个车轮的旋转速度vrot。ecu90基于各个车轮的旋转速度vrot获取车辆va的行驶速度spd作为车速spd。
24.声纳传感器装置30具备图2所示的第一间隙声纳301至第十二间隙声纳312。
25.如图2所示,第一间隙声纳301安装于车辆va,以从车辆va的前方左端部fl向左前方发射声波。第二间隙声纳302安装于车辆va,以从车辆va的左侧前端向前方发射声波。第三间隙声纳303安装于车辆va,以从车辆va的前方右端部fr向右前方发射声波。第四间隙声纳304安装于车辆va,以从车辆va的右侧前端向前方发射声波。
26.此外,第五间隙声纳305安装于车辆va,以从车辆va的后方左端部rl向左后方发射声波。第六间隙声纳306安装于车辆va,以从车辆va的左侧后端向后方发射声波。第七间隙声纳307安装于车辆va,以从车辆va的后方右端部rr向右后方发射声波。第八间隙声纳308安装于车辆va,以从车辆va的右侧后端向后方发射声波。
27.此外,第九间隙声纳309安装于车辆va,以从车辆va的前方左侧部向左方发射声波。第十间隙声纳310安装于车辆va,以从车辆va的后方左侧部向左方发射声波。第十一间隙声纳311安装于车辆va,以从车辆va的前方右侧部向右方发射声波。第十二间隙声纳312安装于车辆va,以从车辆va的后方右侧部向右方发射声波。
28.第一间隙声纳301至第十二间隙声纳312接收被物体反射的声波。
29.声纳传感器装置30与ecu90电连接。声纳传感器装置30将与“各个间隙声纳301至312发送声波的时刻”、“各个间隙声纳301至312接收声波的时刻”以及“各个间隙声纳301至312接收到的声波的频率”等有关的物体信息向ecu90发送。ecu90基于各个间隙声纳301至312发送声波的时刻和接收声波的时刻,获取从各个间隙声纳301至312与物体之间的距离(以下,称为“物体距离ld”)。此外,ecu90基于“各个间隙声纳301至312所发送的声波的频率以及所接收的声波的频率”和车速spd,获取物体相对于各个间隙声纳的相对速度vr。
30.在图2中,标号dx所表示的方向是车辆va的前后方向,以下将该方向称为“车辆前后方向dx”,标号dy所表示的方向是车辆va的宽度方向,以下将该方向称为“车辆宽度方向dy”。
31.照相机传感器装置40具备图3所示的前方照相机41、后方照相机42、左侧照相机43以及右侧照相机44。以下,根据需要,将前方照相机41、后方照相机42、左侧照相机43以及右侧照相机44统称为“照相机45”。
32.如图3所示,前方照相机41安装于车辆va的前端部的中央,以拍摄车辆va的前方的风景,其视角41a为约180
°
。后方照相机42安装于车辆va的后端部的中央,以拍摄车辆va的后方的风景,其视角42a也为约180
°
。左侧照相机43安装于车辆va的左侧部,以拍摄车辆va的左侧的风景,其视角43a也为约180
°
。右侧照相机44安装于车辆va的右侧部,以拍摄车辆va的右侧的风景,其视角44a也为大约180
°
。
33.照相机传感器装置40与ecu90电连接。ecu90经由照相机传感器装置40能够获取与由各个照相机45拍摄到的风景的图像有关的信息(图像数据)。
34.显示器50配设于车辆100的驾驶员可通过视觉确认的部位。在本示例中,显示器50是所谓的导航装置的显示器。
35.显示器50与ecu90电连接。ecu90能够将各种图像显示在显示器50上。在本示例中,ecu90能够将图4所示的俯瞰图像400显示在显示器50上。
36.扬声器60配置在车辆va的车内,并输出后述的警报声。
37.(工作的概要)参照图4以及图5,说明车辆警报装置10的工作的概要。如果车速spd变为阈值速度spdth以下,则车辆警报装置10将图4所示的俯瞰图像400显示在显示器50上。俯瞰图像400是,在基于合成各个照相机所获取的图像数据后得到的合成图像数据而生成的三维合成图像数据中,从位于车辆va的垂直方向上方的俯瞰视点观察车辆va的周围时的图像。该俯瞰图像400的中心显示有表示车辆va的车辆图标410。
38.车辆警报装置10判定在车辆va的左侧方区域(以下,称为“左区域”)以及右侧方区域(以下,称为“右区域”)是否存在满足物体距离ld为阈值物体距离ldth以下的警报条件的物体(以下,称为“警报物体”)。在判定为存在警报物体的情况下,车辆警报装置10计算车辆va维持当前的转向角θst以及车速spd行驶的情况下的车辆va的预测路线rbp(参照图6)。然
后,车辆警报装置10推定当车辆va沿着预测路线rbp移动时车辆va的车身经过的经过区域,基于经过区域判定是否存在车辆va与警报物体碰撞的可能性。
39.在存在具有碰撞可能性的警报物体(以下,称为“碰撞物体”)的情况下,车辆警报装置10计算碰撞距离lc,该碰撞距离lc为车辆va与碰撞物体碰撞之前车辆va沿着预测路线rbp(参照图6)移动的距离。
40.在碰撞物体的碰撞距离lc比阈值碰撞距离lcth长的情况或者存在警报物体但不存在碰撞物体的情况下,车辆警报装置10在俯瞰图像400中与该警报物体的物体距离ld对应的位置处显示“标黄色的警报条(黄色警报条、第一警报显示要素)”,使断断续续地发出警报声的断续声音模式的警报声从扬声器60发出。以下,有时将这种通过显示黄色警报条和发出断续声音模式的警报声而进行的警报称为“第一警报”。
41.另一方面,在警报物体的碰撞距离lc为阈值碰撞距离lcth以下的情况(警报条件成立的情况)下,车辆警报装置10在俯瞰图像400中与该警报物体的物体距离ld对应的位置处显示“标红色的警报条(红色警报条、第二警报显示要素)”,使连续发出警报声的连续声音模式的警报声从扬声器60发出。以下,有时将这种通过显示红色警报条和发出连续声音模式的警报声而进行的警报称为“第二警报”。另外,有时也将碰撞距离lc为阈值碰撞距离lcth以下的条件称为“第二警报条件”或“高级别警报条件”。
42.一般地,由于红色比黄色更能引起人的注意,因此红色警报条的引起驾驶员的注意的警报级别比黄色警报条的警报级别更高,由于连续声音模式比断续声音模式更能引起人的注意,因此连续声音模式的警报级别比断续声音模式的警报级别更高。因此,第二警报的警报级别比第一警报更高。
43.在图5所示的例子中,在车辆va的右区域检测到物体obj1。假定物体obj1的物体距离ld1在阈值物体距离ldth以下,且碰撞距离lc1在阈值碰撞距离lcth以下。在该情况下,如图4所示,车辆警报装置10在俯瞰图像400中与物体距离ld1对应的位置处显示红色警报条420,同时使连续声音模式的警报声从扬声器60发出。
44.参照图6来说明碰撞距离lc。在存在上述警报物体的情况下,车辆警报装置10计算车辆va维持上述当前的转向角θst以及车速spd移动(行驶)的情况下的车辆va的左后轮与右后轮之间的车辆宽度方向dy的中间点(以下,称为“基准点”)bp的移动轨迹,作为上述预测路线rbp。另外,该预测路线rbp是基于规定距离lpd计算的。
45.接着,车辆警报装置10基于上述预测路线rbp推定经过区域。更详细地,车辆警报装置10计算车辆va维持转向角θst以及车速spd行驶的情况下的假想前方右端部frv的移动轨迹rfr、假想前方左端部flv的运动轨迹rfl(未图示)、假想后方右端部rrv的移动轨迹rrr以及假想后方左端部rlv的移动轨迹rrl。然后,车辆警报装置10基于这些移动轨迹rfr、rfl、rrr以及rrl推定经过区域。
46.假想前方右端部frv是从车辆va的前方右端部fr在车辆前后方向dx上的前方侧仅相距规定距离ddx且在车辆宽度方向dy上的右侧仅相距规定距离ddy的点。假想前方左端部flv是从车辆va的前方左端部fl在车辆前后方向dx上的前方侧仅相距规定距离ddx且在车辆宽度方向dy上的左侧仅相距规定距离ddy的点。假想后方右端部rrv是从车辆va的后方右端部rr在车辆前后方向dx上的后方侧仅相距规定距离ddx且在车辆宽度方向dy上的右侧仅
相距规定距离ddy的点。假想后方左端部rlv是从车辆va的后方左端部rl在车辆前后方向dx上的后方侧仅相距规定距离ddx且在车辆宽度方向dy上的左侧仅相距规定距离ddy的点。
47.在物体obj的至少一部分位于经过区域的情况下,车辆警报装置10判定为该物体obj是具有与车辆va碰撞的可能性的物体(以下,称为“碰撞物体”)。由于图6所示的物体obj的一部分位于上述移动轨迹rfr上,因此是碰撞物体。
48.然后,车辆警报装置10获取车辆va与碰撞物体碰撞或者最接近之前车辆va沿着预测路线rbp移动的距离,作为碰撞距离lc。在图6所示的例子中,在移动轨迹rfr上的点p处,车辆va(前方右端部fr)与物体obj最接近。在假想前方右端部frv沿着移动轨迹rfr移动到点p为止的情况下,车辆va的基准点bp沿着预测路线rbp移动的距离lc为碰撞距离lc。
49.如以上说明的,车辆警报装置10对物体距离ld为阈值物体距离ldth以下的警报物体进行某一个警报。在该警报物体不满足碰撞距离lc为阈值碰撞距离lcth以下的第二警报条件的情况下,车辆警报装置10对该警报物体进行第一警报。另一方面,在警报物体满足第二警报条件的情况下,车辆警报装置10对该警报物体进行与第一警报相比警报级别更高的第二警报。由此,由于仅对碰撞可能性相对较高的物体进行第二警报,因此能够降低驾驶员对第二警报产生厌烦感的可能性。
50.(具体的工作)ecu90的cpu(以下,在记载为“cpu”的情况下,若无特别说明,是指ecu90的cpu)每经过规定时间执行图7中流程图所示的例程(警报控制例程)。
51.因此,如果到达规定的定时,则cpu从图7的步骤700开始处理,依次执行步骤705以及710的处理,前进至步骤715。步骤705:cpu从安装在车辆va的左侧部以及右侧部的第九间隙声纳309至第十二间隙声纳312获取物体信息。步骤710:cpu基于在步骤705获取到的物体信息识别静止物体。
52.详细说明步骤710的处理。cpu基于物体信息获取物体的物体距离ld以及相对速度vr。然后,cpu基于车速spd以及物体的相对速度vr识别处于静止的静止物体,作为本例程的处理对象的物体。另外,由于在步骤705中从第九间隙声纳309至第十二间隙声纳312获取了物体信息,因此作为本例程的处理对象的物体是存在于车辆va的左区域以及右区域的物体。
53.步骤715:cpu判定车速spd为阈值速度spdth以下的开始条件是否成立。
54.在开始条件成立的情况下,cpu在步骤715中判定为“是”,并前进至步骤720。在步骤720中,cpu判定是否存在满足物体距离ld为阈值物体距离ldth以下的警报条件的警报物体。
55.在存在上述警报物体的情况下,cpu在步骤720中判定为“是”,并前进至步骤725,计算上述预测路线rbp并推定上述经过区域,前进至步骤730。在步骤730中,cpu从警报物体中选择一个处理对象物体objt并前进至步骤735,基于“步骤725中推定的经过区域”以及“处理对象物体objt相对于车辆va的位置”,判定处理对象物体objt是否有碰撞可能性(即,判定处理对象物体objt是否是碰撞物体)。
56.在处理对象物体objt没有碰撞可能性的情况下(即,在处理对象物体objt不是碰撞物体的情况下),cpu在步骤735中判定为“否”并前进至步骤745,判定是否所有警报物体
都被选择为处理对象物体objt。
57.在不是所有警报物体都被选择为处理对象物体objt的情况下,cpu返回至步骤730,从尚未被选择为未处理对象物体objt的警报物体中选择新的处理对象物体objt,前进至步骤735。
58.如果假定新的处理对象物体objt具有碰撞可能性,则cpu在步骤735中判定为“是”,前进至步骤750。在步骤750,如图6所说明的,cpu计算该处理对象物体objt的碰撞距离lct,前进至步骤755。
59.在步骤755,cpu判定碰撞距离lct为阈值碰撞距离lcth以下的第二警报条件是否成立。在这里,如果假定处理对象物体objt的碰撞距离lct比阈值碰撞距离lcth长,则cpu在步骤755中判定为“否”,前进至步骤745。
60.如果假定所有警报物体尚未都被选择为处理对象物体objt,则cpu在步骤745中判定为“否”,返回至步骤730,选择新的处理对象物体objt。如果假定该处理对象物体objt具有碰撞可能性且碰撞距离lct为阈值碰撞距离lcth以下,则cpu在步骤735中判定为“是”,然后,在步骤755中判定为“是”并前进至步骤760。
61.在步骤760,cpu将第二警报标志xal2t的值设定为“1”,前进至步骤745。第二警报标志xal2t是针对每个警报物体准备的。第二警报标志xal2t的值为“1”的警报物体是满足第二警报条件的警报物体。另一方面,第二警报标志xal1t的值为“0”的物体是不满足第二警报条件的警报物体。
62.如果假定所有警报物体都被选择为处理对象物体objt,则cpu在步骤745中判定为“是”,执行步骤765至775的处理,前进至步骤795并暂时结束本例程。
63.步骤765:cpu执行后述的警报显示处理。步骤770:cpu执行后述的发出警报声处理。步骤775:cpu将第二警报标志xal2t的值设定为“0”。
64.在当cpu前进至步骤715时开始条件不成立的情况下,cpu在该步骤715中判定为“否”,前进至步骤780。在步骤780,只要发出任何模式的警报声,cpu都使该警报声的发出停止(结束),前进至步骤795并暂时结束本例程。
65.在当cpu前进至步骤720时不存在警报物体的情况下,cpu在该步骤720中判定为“否”,前进至步骤780。
66.<警报显示处理>如果cpu前进至图7所示的步骤765,则从步骤800开始图8中流程图所示的子例程的处理,并前进至步骤805。在步骤805,cpu判定在车辆va的左区域是否存在警报物体。
67.在左区域存在警报物体的情况下,cpu判定在存在于左区域的警报物体(以下,称为“左警报物体”)中是否存在第二警报标志xal2t的值为“1”的警报物体。
68.在存在第二警报标志xal2t的值为“1”的左警报物体的情况下,cpu在步骤810中判定为“是”,前进至步骤815。在步骤815,cpu在第二警报标志xal2t的值为“1”的左警报物体中选择碰撞距离lc最小的左警报物体,通过在俯瞰图像400中与该左警报物体的物体距离ld对应的位置处将红色警报条420叠加在俯瞰图像400上而显示,前进至步骤820。
69.在步骤820,cpu判定在右区域是否存在警报物体。在右区域不存在警报物体的情况下,cpu在步骤820中判定为“否”,前进至步骤895并暂时结束本例程。
70.在当cpu前进至步骤810时不存在第二警报标志xal2t的值为“1”的左警报物体的情况下,cpu在该步骤810中判定为“否”,前进至步骤825。
71.在步骤825,cpu在左警报物体(由于在步骤810中被判定为“否”,因此这里是不满足第二警报条件的左警报物体)中选择物体距离ld最小的左警报物体,通过在俯瞰图像400中与该左警报物体的物体距离ld对应的位置处将黄色警报条叠加在俯瞰图像400上而显示,前进至步骤820。
72.另一方面,在当cpu前进至步骤805时不存在左警报物体的情况下,cpu在该步骤805中判定为“否”,前进至步骤820。
73.另一方面,在当cpu前进至步骤820时在车辆va的右区域存在警报物体的情况下,cpu在该步骤820中判定为“是”,前进至步骤830。在步骤830,cpu判定在存在于右区域的警报物体(以下,称为“右警报物体”)中,是否存在第二警报标志xal2t的值为“1”的警报物体。
74.在不存在第二警报标志xal2t的值为“1”的右警报物体的情况下,cpu在该步骤830中判定为“否”,前进至步骤835。在步骤835,cpu在右警报物体(由于在步骤830中被判定为“否”,因此这里是不满足第二警报条件的右警报物体)中选择物体距离ld最小的右警报物体,通过在俯瞰图像400中与该右警报物体的物体距离ld对应的位置处将黄色警报条叠加在俯瞰图像400上而显示,前进至步骤895并暂时结束本例程。
75.另一方面,在当cpu前进至步骤830时存在第二警报标志xal2t的值为“1”的右警报物体的情况下,cpu在该步骤830中判定为“是”,前进至步骤840。在步骤840,cpu在第二警报标志xal2t的值为“1”的右警报物体中选择碰撞距离lc最小的右警报物体,通过在俯瞰图像400中与该右警报物体的物体距离ld对应的位置处将红色警报条420叠加在俯瞰图像400上而显示,前进至步骤895并暂时结束本例程。
76.如上所述,即使在车辆va的左区域存在多个警报物体,在俯瞰图像400的车辆图标410的左区域也仅显示一个警报条。由此,能够防止由于在左区域显示多个警报条而导致驾驶员不知道要注意哪个警报物体这一情况。同样地,即使在车辆va的右区域存在多个警报物体,在俯瞰图像400的车辆图标410的右区域也仅显示一个警报条。进一步地,由于红色警报条比黄色警报条优先显示,因此能够使驾驶员准确地注意在左右区域中碰撞可能性最高的警报物体。
77.<发出警报声处理>如果cpu前进至图7所示的步骤770,则从步骤900开始图9中流程图所示的子例程的处理,并前进至步骤905。在步骤905,cpu判定是否存在第二警报标志xal2t的值为“1”的警报物体。
78.在存在第二警报标志xal2t的值为“1”的警报物体的情况下,cpu在步骤905中判定为“是”并前进至步骤910,使连续声音模式的警报声从扬声器60发出。然后,cpu前进至步骤995并暂时结束本例程。
79.另一方面,在不存在第二警报标志xal2t的值为“1”的警报物体的情况下,cpu在步骤905中判定为“否”并前进至步骤915,使断续声音模式的警报声从扬声器60发出。然后,cpu前进至步骤995并暂时结束本例程。在断续声音模式下,车辆警报装置10开始发出规定的警报声,在从警报声开始发出的时间点经过规定的输出时间的时间点停止警报声的发出,从停止警报声的发出的时间点经过了规定的停止时间后,再次开始发出警报声。断续声
音模式的细节记载在日本特开2019-32744号公报中。
80.如上所说明的,车辆警报装置10在存在警报物体且不存在满足第二警报条件的警报物体的情况下,进行第一警报,在存在满足第二警报条件的警报物体的情况下,进行与第一警报相比警报级别更高的第二警报。由此,由于仅在存在碰撞可能性高的警报物体的情况下进行第二警报,因此能降低驾驶员对第二警报产生厌烦感的可能性。
81.本发明不限于上述实施方式,在本发明的范围内可以采用各种变形例。
82.在图7所示的步骤725,车辆警报装置10基于四点的移动轨迹rfr、rfl、rrr以及rrl推定经过区域,也可以根据该方法以外的方法推定经过区域。例如,车辆警报装置10可以基于转向角θst的标号和车辆va的行进方向,变更用于推定经过区域的移动轨迹。
83.更详细地,在转向角θst为正值(即,手柄14比中立位置更向左侧旋转)且车辆va后退的情况下(参照图6),车辆警报装置10推定移动轨迹rfr和比移动轨迹rfr更靠车辆va侧的区域作为经过区域。在转向角θst为负值且车辆va后退的情况下,车辆警报装置10推定移动轨迹rfl和比移动轨迹rfl更靠车辆va侧的区域作为经过区域。
84.在转向角θst为正值且车辆va前进的情况下,车辆警报装置10推定移动轨迹rrr和比移动轨迹rrr更靠车辆va侧的区域作为经过区域。在转向角θst为负值且车辆va前进的情况下,车辆警报装置10推定移动轨迹rrl和比移动轨迹rrl更靠车辆va侧的区域作为经过区域。
85.另外,车辆警报装置10基于由未图示的换挡位置传感器所检测的“表示由驾驶员操作的未图示的换挡杆的位置的换挡位置”,判定车辆va是前进还是后退。
86.在上述实施方式中,车辆警报装置10构成为在俯瞰图像400中在左区域以及右区域的每个区域仅显示一个警报条,但不限于此。例如,车辆警报装置10可以在俯瞰图像400中在左区域以及右区域的每个区域中分别显示多个红色警报条以及黄色警报条。此外,车辆警报装置10也可以在俯瞰图像400中在左区域以及右区域仅显示一个警报条。
87.作为第一警报显示要素以及第二警报显示要素的例子,对黄色警报条以及红色警报条进行了说明,但是第一警报显示要素以及第二警报显示要素可以具有任何形状。此外,第一警报显示要素以及第二警报显示要素构成为通过颜色来区别警报级别,但不限于此,可以通过形状等来区别警报级别。
88.另外,在上述实施方式中,在第一警报中发出断续声音模式的警报声,在第二警报中发出连续声音模式的警报声,通过警报声的发出模式来区别警报级别,但是不限于此,可以通过例如警报声的音量的大小等来区别警报级别。
89.在存在碰撞距离lc为“比阈值碰撞距离lcth更短的制动阈值距离lcth
’”
以下的警报物体的情况下,为了避免车辆va与该警报物体碰撞或者为了减轻车辆va与该警报物体碰撞时的冲击力,车辆警报装置10使制动装置12向车轮提供制动力。
90.车辆警报装置10可以将该停止时间设定为:最小的物体距离ld越短,断续声音模式的警报声的停止时间越短。
91.车辆警报装置10还可以应用于混合动力车辆以及电动汽车。
92.间隙声纳301至312只要是“通过发射无线介质、接收被反射的无线介质来检测障碍物的传感器”即可。车辆警报装置10可以具备例如红外雷达或毫米波雷达来代替间隙声纳301至312。
93.此外,照相机45的数量以及间隙声纳301至312的数量分别不限于图2以及图3中示出的数量。标号的说明
94.10
…
车辆警报装置、11
…
车辆驱动力产生装置、12
…
制动装置、13
…
转向装置、14
…
手柄、15
…
转向轴、22
…
转向角传感器、24
…
转向扭矩传感器、26
…
车速传感器、30
…
声纳传感器装置、40
…
照相机传感器装置、50
…
显示器、60
…
扬声器、90
…
ecu、100
…
车辆。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1