电池更换设备和搬运机器人的制作方法
1.本公开涉及机器人控制技术领域,具体涉及一种电池更换设备和搬运机器人。
背景技术:
2.搬运机器人(rgv、agv或igv)由于具有自动化程度高、安全、灵活等特点,成为目前物流领域实现物料自动搬运的最佳解决途径之一。
3.相关技术中,搬运机器人通常采用电池供电,而搬运机器人的工作量较大因此电池更换的频率较高。若采用人力更换电池,需要工作人员将搬运机器人上的电量不足的电池卸下,然后将电量充足的备用电池重新安装至搬运机器人。由于电池的体积和重量均较大,因此人力搬运时较为困难,且更换效率也较低,不符合物流领域对搬运机器人高效运行的要求。
技术实现要素:
4.为了解决相关技术中的问题,本公开实施例提供一种电池更换设备和搬运机器人。
5.第一方面,本公开实施例中提供了一种电池更换设备,
6.具体的,所述电池更换设备包括车体和设置在所述车体上的至少两个电池位;
7.所述电池位的底面设置有第一助滑组件和引导电池移动方向的第一导向组件,且所述第一导向组件能够限制电池在所述第一导向组件的垂直方向上的最大位移;所述第一导向组件包括两个导槽或两个导轨;所述第一助滑组件包括润滑条、滚轮或滚珠中的至少一个;
8.所述车体用于将所述电池更换设备移动至需要更换电池的搬运机器人对应的更换位置或安装位置,所述更换位置为所述至少两个电池位中的空闲电池位与所述搬运机器人的电池仓对齐的位置,所述安装位置为所述至少两个电池位中放置有备用电池的工作电池位与所述搬运机器人的电池仓对齐的位置,以便所述搬运机器人的电池沿所述空闲电池位的第一导向组件在所述空闲电池位的第一助滑组件的作用下移动至所述空闲电池位中,或者所述工作电池位放置的备用电池沿所述工作电池位的第一导向组件在所述工作电池位的第一助滑组件的作用下移动至所述搬运机器人的电池仓。
9.可选的,所述电池位的底面还设置有与第一导向组件垂直的第一限位件,所述第一限位件用于限制电池沿所述第一导向组件从外界向所述电池位移动时在其移动方向上的最大位移。
10.可选的,所述电池位的底面还设置有与第一导向组件垂直的第二限位件,所述第二限位件、所述第一限位件和所述第一导向组件组成电池的固定空间。
11.可选的,所述第二限位件与所述电池位活动连接,能够在受到外力时与所述电池位脱离,或者能够根据控制收纳于所述电池位底面设置的收纳槽中。
12.可选的,所述车体还设置有手推杆,所述手推杆用于承受外力,以便于所述车体在
所述外力的作用下将所述电池更换设备移动至所述更换位置或所述安装位置。
13.可选的,所述电池位上设置有充电器,所述充电器的一端设置有用于连接电源的插头,另一端设置有用于连接电池的接口。
14.第二方面,本公开实施例中提供了一种搬运机器人。
15.具体的,所述搬运机器人包括放置电池的电池仓,所述电池用于向所述搬运机器人供电;
16.所述电池仓的底面设置有第二助滑组件和引导电池移动方向的第二导向组件,所述电池能够沿所述第二导向组件从外界移动至所述电池仓,或者从所述电池仓中移出,且所述第二导向组件能够限制所述电池在所述第二导向组件的垂直方向上的最大位移;
17.所述第二导向组件包括两个导槽或两个导轨;所述第二助滑组件包括润滑条、滚轮或滚珠中的至少一个。
18.可选的,所述电池仓的侧壁设置有活动连接的固定组件;
19.所述固定组件移动至工作位置时用于限制所述电池仓中放置的电池在所述电池仓中的位置;所述固定组件返回至初始位置时用于解除对所述电池位置的限制。
20.可选的,所述电池仓还设置有缓冲元件,用于在电池从外界移动至所述电池仓时抵消所述电池对所述电池仓的冲击力。
21.可选的,所述电池仓还包括设置在所述电池仓入口的仓盖,所述仓盖与所述电池仓活动连接,用于在受到外力时与所述电池仓脱离。
22.根据本公开实施例提供的技术方案,在搬运机器人需要更换电池时,可以控制电池更换设备首先移动至搬运机器人对应的更换位置,并将搬运机器人的电池仓中放置的电量不足的电池移动至电池更换设备上的空闲电池位;然后控制电池更换设备首先移动至搬运机器人对应的安装位置,并将电池更换设备上工作电池位上放置的备用电池移动至搬运机器人的电池仓,使得该搬运机器人可以使用该备用电池继续工作,解决了由于电池的体积和重量较大导致的电池更换困难的问题,提高了电池更换的效率,实现了电池的高效更换。
23.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
附图说明
24.结合附图,通过以下非限制性实施方式的详细描述,本公开的其它特征、目的和优点将变得更加明显。在附图中:
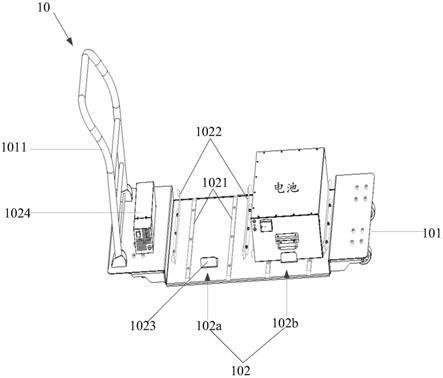
25.图1示出根据本公开实施例的电池更换设备的结构示意图。
26.图2示出根据本公开实施例的搬运机器人的结构示意图。
27.图3示出根据本公开实施例的更换电池的位置示意图。
具体实施方式
28.下文中,将参考附图详细描述本公开的示例性实施例,以使本领域技术人员可容易地实现它们。此外,为了清楚起见,在附图中省略了与描述示例性实施例无关的部分。
29.在本公开中,应理解,诸如“包括”或“具有”等的术语旨在指示本说明书中所公开
的特征、数字、步骤、行为、部件、部分或其组合的存在,并且不欲排除一个或多个其他特征、数字、步骤、行为、部件、部分或其组合存在或被添加的可能性。
30.另外还需要说明的是,在不冲突的情况下,本公开中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本公开。
31.本公开实施例提供一种电池更换设备10,如图1所示,所述电池更换设备10包括车体101和设置在该车体101上的至少两个电池位102,本公开实施例以电池更换设备10设置有两个电池位102为例进行说明,但实际应用中电池更换设备10上可以设置数量较多的电池位102,以便于连续完成多个搬运机器人的电池更换。
32.该电池位102的底面设置有第一助滑组件1021和引导电池移动方向的第一导向组件1022。
33.其中,第一助滑组件1021用于电池在电池位102中移动时降低该电池与电池位102底面之间的摩擦力。具体的,该第一助滑组件1021包括润滑条、滚轮或滚珠中的至少一个,该润滑条可以为耐磨的聚甲醛(pom)条,使得润滑条的使用寿命较长。本公开实施例以该第一助滑组件1021包括两条润滑条为例进行说明,实际应用中该第一助滑组件1021可以为润滑条、滚轮或滚珠中的任意一个,或者可以为润滑条、滚轮或滚珠中任意两个或三个的组合,本公开实施例对此不作限定。
34.该第一导向组件1022包括两个导槽或两个导轨,通过该两个导槽或两个导轨之间的距离,可以限制电池在该第一导向组件1022的垂直方向上的最大位移,例如该两个导槽或两个导轨之间的距离可以略大于电池在该第一导向组件1022垂直方向上的尺寸,使得电池可以在两个导槽或两个导轨之间自由移动,同时其移动方向能够被该两个导槽或两个导轨限制。本公开实施例以两个导轨形成导向槽为例进行说明。
35.该车体101用于将该电池更换设备10移动至需要更换电池的搬运机器人20对应的更换位置或安装位置。当该电池更换设备10移动至该更换位置时,该电池更换设备10设置的多个电池位102中的其中一个空闲电池位102a与搬运机器人的电池仓对齐,这样搬运机器人中电量不足的电池可以沿该空闲电池位102a的第一导向组件1022在该空闲电池位102a的第一助滑组件1021的作用下移动至该空闲电池位102a中;当该电池更换设备10移动至该安装位置时,该电池更换设备10设置的多个电池位102中的其中一个放置有备用电池的工作电池位102b与该搬运机器人的电池仓对齐,这样该工作电池位102b放置的备用电池可以沿该工作电池位102b的第一导向组件1022在该工作电池位102b的第一助滑组件1021的作用下移动至该搬运机器人的电池仓,使得搬运机器人可以使用该备用电池继续工作。
36.通过上述更换过程可以解决由于电池的体积和重量较大导致的电池更换困难的问题,提高了电池更换的效率,实现了电池的高效更换。
37.在一个实施例中,参考图1所示,该电池位102还设置有与第一导向组件1022垂直的第一限位件1023,该第一限位件1023用于限制电池沿该第一导向组件1022从外界向该电池位102移动时在其移动方向上的最大位移,即从搬运机器人的电池仓中移出的电池在沿第一导向组件1022向电池位102移动时可以被第一限位件1023挡住,避免电池过度移动导致的掉落或者电池更换设备10的侧翻问题。
38.在一个实施例中,该电池位102的还设置有与第一导向组件1022垂直的第二限位件(图1未示出),该第二限位件、该第一限位件1023和该第一导向组件1022组成电池的固定
空间。具体的,当电池位102中放置有电池时,通过该第二限位件、该第一限位件1023和该第一导向组件1022可以限制该电池在电池位102中的位置,避免了在电池更换设备10移动时电池由于颠簸与电池位102设置的各个元件出现碰撞的问题,进而避免了电池由于多次碰撞导致损坏的问题,提高了电池寿命。
39.可选的,该第二限位件可以与该电池位102活动连接,能够在受到外力时与该电池位102脱离,或者能够根据控制收纳于该电池位102底面设置的收纳槽中。具体的,当电池更换设备10移动至上述更换位置或者安装位置时,工作人员可以通过外力将第二限位件拔出或拆卸,或者可以控制该第二限位件返回至该电池位102底面设置的收纳槽中,以便于电池移入电池位102或者从该电池位102移出。
40.在一个实施例中,参考图1所示,该车体101还设置有手推杆1011,该手推杆1011用于承受外力,以便于该车体101在该外力的作用下将该电池更换设备10移动至该更换位置或该安装位置。具体的,在搬运机器人需要更换电池时,工作人员可以握持该手推杆1011拖动电池更换设备10移动至搬运机器人对应的更换位置并拆卸第二限位件,然后拉动将搬运机器人的电池仓中的电量不足的电池,使得该电量不足的电池脱离电池仓并沿电池更换设备10的空闲电池位102a的第一导向组件1022在空闲电池位102a的第一助滑组件1021的作用下移动至该空闲电池位102a。接着工作人员可以握持该手推杆1011再次拖动电池更换设备10移动至搬运机器人对应的安装位置,并推动电池更换设备10的工作电池位102b上放置的备用电池,使得该备用电池可以沿工作电池位102b的第一导向组件1022在工作电池位102b的第一助滑组件1021的作用下从该工作电池位102b中移出并移动至搬运机器人的电池仓。
41.在一个实施例中,参考图1所示,该电池位102上设置有充电器1024,该充电器1024的一端设置有用于连接电源的插头,另一端设置有用于连接电池的接口。当电池更换设备10移动至靠近外部电源的位置时,可以通过该充电器为电池位上放置的电池充电,解决了需要将电池搬运至充电桩附近才能进行充电的问题,提高了电池充电的便捷性。
42.本公开实施例提供的一种电池更换设备,在搬运机器人需要更换电池时,可以控制电池更换设备首先移动至搬运机器人对应的更换位置,并将搬运机器人的电池仓中放置的电量不足的电池移动至电池更换设备上的空闲电池位;然后控制电池更换设备首先移动至搬运机器人对应的安装位置,并将电池更换设备上工作电池位上放置的备用电池移动至搬运机器人的电池仓,使得该搬运机器人可以使用该备用电池继续工作,解决了由于电池的体积和重量较大导致的电池更换困难的问题,提高了电池更换的效率,实现了电池的高效更换。
43.本公开实施例提供一种搬运机器人20,如图2所示,所述搬运机器人20包括放置电池的电池仓201,该电池用于向该搬运机器人20供电。
44.该电池仓201的底面设置有第二助滑组件2011和引导电池移动方向的第二导向组件2012。
45.其中,第二助滑组件2011用于电池在电池仓201中移动时降低该电池与电池仓201底面之间的摩擦力。具体的,该第二助滑组件2011包括润滑条、滚轮或滚珠中的至少一个,该润滑条可以为耐磨的聚甲醛(pom)条,使得润滑条的使用寿命较长。本公开实施例以该第而助滑组件2011包括三条润滑条为例进行说明,实际应用中该第二助滑组件2011可以为润
滑条、滚轮或滚珠中的任意一个,或者可以为润滑条、滚轮或滚珠中任意两个或三个的组合,本公开实施例对此不作限定。
46.该第二导向组件2012包括两个导槽或两个导轨,通过该两个导槽或两个导轨之间的距离,可以限制电池在该第二导向组件2012的垂直方向上的最大位移,例如该两个导槽或两个导轨之间的距离可以略大于电池在该第二导向组件2012垂直方向上的尺寸,使得电池可以在两个导槽或两个导轨之间自由移动,同时其移动方向能够被该两个导槽或两个导轨限制。具体的,该电池能够沿该第二导向组件2012包括的两个导槽或两个导轨从外界移动至该电池仓201,或者从该电池仓201中移出。本公开实施例以第二导向组件2012包括两条导轨形成导向槽为例进行说明。
47.实际应用中,该第二导向组件2012与电池更换设备10包括的第一导向组件1022对应设置,即该第二导向组件2012包括的两个导槽或两个导轨之间的距离与该第一导向组件1022包括的两个导槽或两个导轨之间的距离相同或相近,便于在更换电池时对电池移动方向的引导。
48.在一个实施例中,该电池仓201的侧壁设置有至少一个活动连接的固定组件2013。
49.该固定组件2013移动至工作位置时用于限制该电池仓201中放置的电池在该电池仓201中的位置;该固定组件2013返回至初始位置时用于解除对该电池位102置的限制。
50.可选的,参考图2所示,该固定组件2013可以为可旋转的快拆电池卡扣,且该电池仓201的两个侧壁均设置有该卡扣。当电池仓201中放置有电池时,卡扣可以在外力的作用下旋转至工作位置,此时该卡扣与电池紧密接触,用于限制电池在该电池仓201中的位置。当需要将电池仓201中放置的电池移出时,该卡扣可以在外力的作用下旋转至初始位置,此时该卡扣与电池不接触,即不会对电池的移动造成影响。
51.在一个实施例中,该电池仓201还设置有缓冲元件(图2未示出),该缓冲元件可以设置在电池仓201的后壁,当电池从外界移动至该电池仓201时电池可以撞上该缓冲元件,并在该缓冲元件的作用下抵消该电池对该电池仓201的冲击力。
52.在一个实施例中,该电池仓201还包括设置在该电池仓201入口的仓盖(图2未示出),该仓盖与该电池仓201活动连接,用于在受到外力时与该电池仓201脱离。
53.具体的,在搬运机器人20需要更换电池时,工作人员可以拖动电池更换设备10移动至搬运机器人20对应的更换位置,该更换位置可以如图3所示,并拆卸电池更换设备10的第二限位件和搬运机器人20的仓盖,然后旋转固定组件2013,使得该固定组件2013返回至初始位置,接着拉动搬运机器人20的电池仓201中的电量不足的电池,使得该沿图3中x方向移动,即该电池沿电池仓201的第二导向组件2012在第二助滑组件2011的作用下从电池仓201中移出并沿电池更换设备10的空闲电池位102a的第一导向组件1022在空闲电池位102a的第一助滑组件1021的作用下移动至该空闲电池位102a。接着工作人员可以再次拖动电池更换设备10移动至搬运机器人20对应的安装位置,并推动电池更换设备10的工作电池位102b上放置的备用电池,使得该备用电池可以沿工作电池位102b的第一导向组件1022在工作电池位102b的第一助滑组件1021的作用下从该工作电池位102b中移出并沿电池仓201的第二导向组件2012在第二助滑组件2011的作用下移动至搬运机器人20的电池仓201。接着工作人员旋转固定组件2013,使得该固定组件2013转动之工作位置,固定该电池仓201中的电池,并安装该搬运机器人20的仓盖,使得该搬运机器人20可以继续工作。最后工作人员安
装电池更换设备10的第二限位件,并拖动该电池更换设备10驶离电池更换现场。
54.本公开实施例提供一种搬运机器人,该搬运机器人在需要更换电池时,可以与电池更换设备配合,在该电池更换设备移动至更换位置后将电量不足的电池移动至电池更换设备上的空闲电池位,在该电池更换设备移动至安装位置后将电池更换设备上的工作电池位上放置的备用电池移动至电池仓,使得该搬运机器人可以使用该备用电池继续工作,解决了由于电池的体积和重量较大导致的电池更换困难的问题,提高了电池更换的效率,实现了电池的高效更换。
55.以上描述仅为本公开的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本公开中所涉及的实用新型范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述实用新型构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本公开中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1