用于预测车辆的安全驾驶辅助系统的预测轨迹的预测设备的制作方法
1.本发明涉及一种用于预测车辆的安全驾驶辅助系统的预测轨迹的预测设备、具有所述预测设备的车辆以及控制车辆的预测设备的方法。
背景技术:
2.对于驾驶辅助系统,驾驶员部分或主要地限定了自主车辆的未来状态。为了做出决策,这些系统会考虑某个预测时间段内预测的车辆状态的一个或多个假设。
3.ep 3291202 b1示出了一种用于自主车辆的操纵的轨迹规划方法,还示出了被布置为执行该方法的高级驾驶辅助系统以及包括这种高级驾驶辅助系统的车辆。
技术实现要素:
4.在此背景下,本发明的目的是提供一种用于预测车辆的安全驾驶辅助系统的预测轨迹的改进的预测设备、具有所述预测设备的改进的车辆、以及控制车辆的预测设备的改进方法。
5.该目的通过用于预测车辆的安全驾驶辅助系统的预测轨迹的预测设备、具有所述预测设备的车辆以及根据独立权利要求的控制车辆的预测设备的方法来实现。
6.有利地,可以通过使用来自车辆的不同驾驶辅助系统的信息来改进对预测车辆要遵循的预测轨迹的安全驾驶辅助系统的预测。预测的轨迹之后可以被车辆的安全驾驶辅助系统使用,例如用于预测车辆与物体或其它车辆的可能碰撞。
7.一种用于预测车辆的安全驾驶辅助系统的预测轨迹的预测设备,包括接收单元和确定单元。接收单元配置为从车辆的至少一个车辆传感器接收至少一个传感器信息和从车辆的至少一个另外的驾驶辅助系统接收至少一个轨迹信息。另外的驾驶辅助系统可以位于安全驾驶辅助系统之外或者可以实施到驾驶辅助系统中。确定单元配置为使用轨迹信息或传感器信息为车辆确定预测轨迹。
8.车辆可以是多用途车辆或商用车辆、例如卡车、公共汽车等。安全驾驶辅助系统可以是主动安全驾驶辅助系统,其可用于防止危险情况和/或减少由车辆不可避免的碰撞造成的伤害。为了实现这一点,安全驾驶辅助系统可以配置为观察车辆环境、车辆状态和/或驾驶员意图。此外,安全驾驶辅助系统可以配置为分析情况并选择可能的碰撞目标,以决定预防策略和/或执行期望的预防策略。为了正确地选择目标对象,主动安全驾驶辅助系统可以配置为考虑未来的车辆状态。因此,系统可以配置为区分可能的碰撞目标和其它不相关的环境对象、例如迎面而来的车道上的汽车、停放的汽车或人行道上的行人。车辆传感器可以是安全驾驶辅助系统的一部分。传感器信息可以表示车辆动态、驾驶员监测信息和/或观察到的环境信息。然而,轨迹信息可以表示由另外的驾驶辅助系统检测或分析的观察到的环境和/或当前车辆状态。根据一个实施例,轨迹信息可以表示由另外的驾驶辅助系统通过使用观察到的环境和/或当前车辆状态规划的轨迹。为了提供轨迹信息,另外的驾驶辅助系统可以包括另外的车辆传感器或使用上述车辆传感器,如果车辆传感器不是安全驾驶辅助
系统的一部分。确定单元可以配置为使用轨迹信息或传感器信息来确定预测轨迹。
9.根据一个实施例,接收单元可以配置为从另外的驾驶辅助系统接收轨迹信息,该另外的驾驶辅助系统配置为纵向和/或横向引导系统、例如车辆的自适应巡航控制、车道保持辅助系统或高速公路辅助系统。在激活状态下,这样的另外的驾驶辅助系统可以配置为持续地规划车辆的轨迹,其中由另外的驾驶辅助系统规划的轨迹可能比由安全驾驶辅助系统确定的未来车辆状态更可靠,由安全驾驶辅助系统确定的未来车辆状态只能在危险情况下激活。因此,根据一个实施例,确定单元可以配置为如果另外的驾驶辅助系统被激活,则使用轨迹信息为车辆确定预测轨迹,如果另外的驾驶辅助系统被停用,则使用传感器信息为车辆确定预测轨迹。根据一个实施例,如果另外的驾驶辅助系统被激活,则确定单元可以配置为仅使用轨迹信息和/或忽略传感器信息为车辆确定预测轨迹,如果另外的驾驶辅助系统被停用并且没有可用的轨迹信息,则确定单元仅使用传感器信息为车辆确定预测轨迹。如果另外的驾驶辅助系统被激活,则车辆可以至少部分地被自动地引导,如果另外的驾驶辅助系统被停用,则车辆可以由驾驶员引导。根据一个实施例,接收单元可以配置为在车辆被自动引导时从被激活的另外的驾驶辅助系统接收轨迹信息。
10.根据一个实施例,接收单元可以配置为从另外的驾驶辅助系统接收轨迹信息作为横向规划轨迹,该另外的驾驶辅助系统配置为横向引导系统、例如车辆的车道保持辅助系统,或者接收单元配置为从被配置为纵向引导系统的另外的驾驶辅助系统、例如车辆的自适应巡航控制接收轨迹信息作为纵向规划轨迹。使用另外的驾驶辅助系统的信息提供的优点是,所述系统的信息可以进一步单元化,其大部分已经在车辆中实现并且在其功能上是成熟的。因此,可以期望在本方法中使用易于计算且可靠的轨迹信息。
11.根据一个实施例,接收单元可以配置为从车辆的至少第二另外的驾驶辅助系统接收至少第二轨迹信息,确定单元配置为使用第二轨迹信息为车辆确定预测轨迹。这样,轨迹信息和第二轨迹信息的组合可以用于确定预测轨迹。根据另一个实施例,如果另外的驾驶辅助系统被停用,则可以仅使用第二轨迹信息。或者,如果第二另外的驾驶辅助系统被停用,则可以仅使用轨迹信息。
12.根据一个实施例,接收单元可以配置为从被配置为车辆的自适应巡航控制、车道保持辅助或高速公路辅助的第二另外的驾驶辅助系统接收第二轨迹信息。
13.根据一个实施例,接收单元可以配置为从第二另外的驾驶辅助系统接收第二轨迹信息作为横向规划轨迹,该第二另外驾驶辅助系统配置为横向引导系统、例如车辆的车道保持辅助系统,或者接收单元配置为从第二另外的驾驶辅助系统接收第二轨迹信息作为纵向规划轨迹,该第二另外的驾驶辅助系统配置为纵向引导系统、例如车辆的自适应巡航控制。根据一个实施例,可以由确定单元使用来自横向引导系统的横向规划轨迹和来自纵向引导系统的纵向规划轨迹来确定最可靠的预测轨迹。
14.根据一个实施例,预测设备可以包括激活单元,其中,激活单元配置为激活另外的驾驶辅助系统的另外的预测设备,另外的预测设备配置为预测车辆的规划轨迹并且提供规划轨迹作为轨迹信息。以此方式,即使另外的驾驶辅助系统被停用,也可以提供可靠的轨迹信息。
15.根据一个实施例,预测设备可以包括碰撞计算单元,其中,碰撞计算单元配置为使用基于另外的驾驶辅助系统的规划轨迹计算车辆与物体或另外的车辆的碰撞的碰撞概率
值。根据一个实施例,碰撞计算单元配置为计算车辆与预测轨迹上的物体或其它车辆的碰撞的碰撞概率值。可以使用这样的碰撞概率值以避免可能的碰撞。碰撞计算单元可以提高车辆的安全性。
16.根据一个实施例,碰撞计算单元可以配置为使用碰撞概率值来计算碰撞避免策略以用于调整轨迹。通过调整规划轨迹,可以有利地避免碰撞。
17.一种用于车辆的安全驾驶辅助系统,包括前述预测设备的实施例。安全驾驶辅助系统还可以包括用于观察和/或提供传感器信息的观察单元、用于分析情况和选择可能的碰撞目标的分析单元、用于决定预防策略的决定单元和/或用于执行期望的预防策略。有利地,这种安全驾驶辅助系统可以使用来自不同驾驶辅助系统的信息来预测车辆的最可靠的预测轨迹。
18.一种车辆包括前述预测设备的实施例。车辆可以是多用途车辆或商用车辆、例如卡车、公共汽车等。车辆可以配置为自动车辆或半自动车辆。根据一个实施例,车辆可以包括安全驾驶辅助系统、横向和/或纵向引导系统、例如自适应巡航控制和/或车道保持辅助和/或高速公路辅助。
19.一种控制上述预测设备的方法,包括:
20.从车辆的至少一个车辆传感器接收至少一个传感器信息和从车辆的至少一个另外的驾驶辅助系统接收至少一个轨迹信息;以及
21.使用轨迹信息或传感器信息为车辆确定预测轨迹。
22.可以使用上述预测设备来执行该方法或该方法的步骤。
23.同样有利的是具有程序代码的计算机程序产品,该程序可以存储在机器可读载体、例如半导体存储器、硬盘或光学存储器上,当程序产品在计算机或设备上执行时,其用于执行前述实施例之一的方法。
附图说明
24.在随后的描述中将参考附图更详细地解释在此所示出的方案的实施例,其中:
25.图1示出了包括根据本发明实施例的预测设备的车辆的示意图,该预测设备用于预测车辆的安全驾驶辅助系统的预测轨迹;以及
26.图2示出了根据本发明的一个实施例的控制预测设备的方法的流程图。
27.在以下对本发明的有利实施例的描述中,对于各图中所示出且作用类似的元件,将使用相同或相似的附图标记,其中将省略对这些元件的重复描述。
具体实施方式
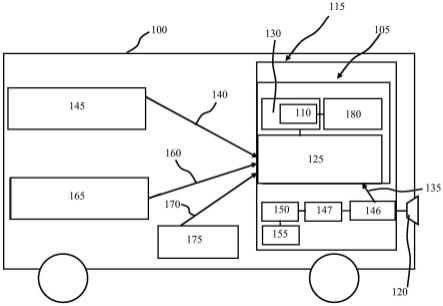
28.图1示出了车辆100的示意图,该车辆100包括根据本发明的实施例的用于预测车辆100的安全驾驶辅助系统115的预测轨迹110的预测设备105。车辆100是多用途车辆或商用车辆和/或配置为自动驾驶的车辆100或半自动驾驶的车辆100。根据该实施例,车辆100包括至少一个车辆传感器120。
29.用于预测车辆100的安全驾驶辅助系统115的预测轨迹110的预测设备105包括接收单元125和确定单元130。接收单元125配置为从车辆130的至少一个车辆传感器120接收至少一个传感器信息135和从车辆100的至少一个另外的驾驶辅助系统145接收至少一个轨
迹信息140。根据一个实施例,另外的驾驶辅助系统145位于安全驾驶辅助系统115之外或根据另一个实施例,另外的驾驶辅助系统145被实施到安全驾驶辅助系统115中。确定单元130配置为使用轨迹信息140或传感器信息135为车辆100确定预测轨迹110。
30.根据该实施例,预测设备105被集成或实施到车辆100的安全驾驶辅助系统115中。安全驾驶辅助系统115配置为主动安全驾驶辅助系统,其配置为防止危险情况和/或减少车辆100不可避免的碰撞所造成的伤害。为了实现这一点,根据该实施例,安全驾驶辅助系统115包括观察单元146,该观察单元146配置为观察车辆环境和/或车辆100的车辆状态和/或驾驶员意图和/或配置为提供车辆环境和/或车辆状态和/或驾驶员意图作为传感器信息135。此外,根据该实施例,安全驾驶辅助系统115包括用于分析情况和选择可能的碰撞目标的分析单元147、用于决定预防策略的决定单元150和/或用于执行期望的预防策略的执行单元155。为了正确选择目标对象,主动安全驾驶辅助系统115配置为考虑未来的车辆状态。因此,系统115可以配置为区分可能的碰撞目标和其它不相关的环境对象、例如迎面而来的车道上的汽车、停放的汽车或人行道上的行人。根据该实施例,车辆传感器120是安全驾驶辅助系统115或车辆100的一部分。根据该实施例,传感器信息135表示车辆动态、驾驶员监测信息和/或观察到的环境信息。然而,根据该实施例,轨迹信息140表示由另外的驾驶辅助系统145检测或分析的观察到的环境和/或当前车辆状态。根据实施例,轨迹信息140表示由另外的驾驶辅助系统145通过使用观察到的环境和/或当前车辆状态预测的预测轨迹。为了提供轨迹信息140,另外的驾驶辅助系统115包括另外的车辆传感器或者配置为使用车辆传感器120,如果车辆传感器120不是安全驾驶辅助系统115的一部分。确定单元130配置为使用轨迹信息140或传感器信息135来确定预测轨迹110。
31.根据该实施例,接收单元125配置为从被配置为车辆的自适应巡航控制、车道保持辅助或高速公路辅助的另外的驾驶辅助系统145接收轨迹信息140。在激活状态中,另外的驾驶辅助系统145配置为持续地预测车辆100的轨迹,其中由自适应巡航控制、车道保持辅助或高速公路辅助预测的预测轨迹比通过安全驾驶辅助系统115预测的未来车辆状态更可靠,未来车辆状态仅在危险情况下激活。因此,根据该实施例,确定单元130配置为如果另外的驾驶辅助系统145被激活,则使用轨迹信息140为车辆100确定预测轨迹110,如果另外的驾驶辅助系统145被停用,则使用传感器信息135为车辆100确定预测轨迹110。根据该实施例,确定单元130配置为如果另外的驾驶辅助系统145被激活,则仅使用轨迹信息140和/或忽略传感器信息为车辆100确定预测轨迹110,如果另外的驾驶辅助系统145被停用并且没有轨迹信息可用,则仅使用传感器信息135来预测车辆100的轨迹110。如果另外的驾驶辅助系统145被激活,则车辆100可以被自动引导,如果另外的驾驶辅助系统145被停用,车辆100可以由驾驶员引导。根据一个实施例,接收单元125配置为在车辆100被自动引导时从被激活的另外的驾驶辅助系统145接收轨迹信息140。
32.根据该实施例,接收单元125配置为从被配置为车辆100的车道保持辅助系统的另外的驾驶辅助系统145接收轨迹信息140作为横向规划轨迹,或者接收单元125配置为从被配置为车辆100的自适应巡航控制的另外的驾驶辅助系统145接收轨迹信息140作为纵向规划轨迹。
33.根据该实施例,接收单元125配置为从车辆100的至少第二另外的驾驶辅助系统165接收至少第二轨迹信息160,确定单元130配置为使用第二轨迹信息160为车辆100确定
预测轨迹110。根据该实施例,接收单元125配置为从车辆100的至少第三另外的驾驶辅助系统175接收至少第三轨迹信息170,确定单元130配置为使用第三轨迹信息170为车辆100确定预测轨迹110。
34.根据该实施例,接收单元125配置为从被配置为车辆100的自适应巡航控制、车道保持辅助或高速公路辅助的第二另外的驾驶辅助系统165接收第二轨迹信息160。根据在该实施例中,接收单元125配置为从被配置为车辆100的自适应巡航控制、车道保持辅助或高速公路辅助的第三另外的驾驶辅助系统175接收第三轨迹信息170。
35.根据该实施例,接收单元125配置为从第二另外的驾驶辅助系统165接收第二轨迹信息160作为横向规划轨迹,第二另外的驾驶辅助系统165配置为车辆100的车道保持辅助系统,或者接收单元配置为从被配置为车辆100的自适应巡航控制的第二另外的驾驶辅助系统165接收第二轨迹信息160作为纵向规划轨迹。根据该实施例,确定单元130使用来自被配置为车道保持辅助的另外的驾驶辅助系统145的横向规划轨迹和来自被配置为自适应巡航控制的第二另外的驾驶辅助系统165的纵向规划轨迹来确定最可靠的预测轨迹110。
36.根据实施例,预测设备105包括激活单元,其中,激活单元配置为激活外的驾驶辅助系统145的另外的预测设备,其中,另外的预测设备配置为预测车辆100的预测轨迹并且提供预测轨迹作为轨迹信息140。
37.根据该实施例,预测设备105还包括碰撞计算单元180,其中,碰撞计算单元180配置为使用基于另外的驾驶辅助系统145的规划轨迹计算车辆100与物体或另外的车辆的碰撞的碰撞概率值。根据一个实施例,碰撞计算单元180配置为计算车辆100与预测轨迹110上的物体或其它车辆的碰撞的碰撞概率值。根据一个实施例,碰撞计算单元180可以配置为使用碰撞概率值来计算碰撞避免策略以用于调整预测轨迹110。
38.换言之,图1示出了预测设备105的架构,其改进了主动安全驾驶辅助系统115的自主路径预测。
39.主动安全驾驶辅助系统115用于防止危险情况或减少由不可避免的碰撞造成的伤害。根据一个实施例,为了实现这一点,持续地执行以下步骤:
[0040]-观察环境、车辆状态和驾驶员意图
[0041]-分析情况并选择可能的碰撞目标
[0042]-决定预防策略
[0043]-执行所需的策略
[0044]
为了正确选择目标对象,主动安全驾驶辅助系统115将未来车辆状态考虑在内。因此,系统115可以区分可能的碰撞目标和其它不相关的环境对象、例如对面车道上的汽车、停放的汽车或人行道上的行人。
[0045]
估计未来车辆状态的一个问题是,即使考虑环境数据、车辆动力学和驾驶员监测,对于更长的预测时间,估计也会带来很大的不确定性。例如,这可能会导致错误的轨道选择,从而导致误报。
[0046]
主动安全驾驶辅助系统仅在危险情况下进行干预。其它另外的驾驶辅助系统145、165、175、例如自适应巡航控制、车道保持辅助和高速公路辅助,可以转入激活状态,并且在处于激活状态时,持续接管车辆引导的至少一部分。为了确保车辆100被根据给定要求、例如无碰撞、最小抖动、减少燃料消耗来引导,根据一个实施例,这些系统145、165、175基于观
察到的环境和当前车辆状态来规划轨迹。根据一个实施例,为了引导车辆100,系统计算致动器控制值以执行预测轨迹110。虽然预测轨迹110在车辆100被引导时避免了碰撞,但是主动安全驾驶辅助系统115在后台仍然被激活。因为被引导的车辆100将遵循预测轨迹110,其不确定性小于基于环境数据、车辆动力学和驾驶员监测的预测。在这种情况下,预测轨迹110也可以用于主动安全驾驶辅助系统115以选择目标对象。
[0047]
这个想法的一个可能版本是:
[0048]
如果激活,来自车道保持辅助的横向轨迹和来自自适应巡航控制驾驶功能的纵向轨迹被用作预测的自主车辆轨迹/预测轨迹110。
[0049]
图2示出了根据本发明实施例的控制预测设备的方法200的流程图。方法200可由参考图1描述的预测设备或类似的预测设备执行。
[0050]
控制方法200包括从车辆的至少一个车辆传感器接收至少一个传感器信息和从车辆的至少一个另外的驾驶辅助系统接收至少一个轨迹信息的步骤210。此外,控制方法200包括使用轨迹信息或传感器信息为车辆确定预测轨迹的步骤220。
[0051]
根据一个实施例,在确定车辆的预测轨迹的步骤220中,如果在接收轨迹信息的步骤210中,轨迹信息被接收,则仅使用轨迹信息和/或忽略传感器信息来确定预测轨迹。根据一个实施例,在确定车辆的预测轨迹的步骤220中,如果在接收的步骤210中没有接收到轨迹信息,则仅使用传感器信息来确定预测轨迹。
[0052]
根据一个实施例,在为车辆确定预测轨迹的步骤220中,如果在接收轨迹信息的步骤210中,来自多个不同的另外的驾驶辅助系统的轨迹信息被接收,则使用来自多个不同的另外的驾驶辅助系统的多个轨迹信息和/或忽略传感器信息来确定预测轨迹。
[0053]
附图标记列表
[0054]
100
ꢀꢀꢀꢀꢀ
车辆
[0055]
105
ꢀꢀꢀꢀꢀ
预测设备
[0056]
110
ꢀꢀꢀꢀꢀ
预测轨迹
[0057]
115
ꢀꢀꢀꢀꢀ
安全驾驶辅助系统
[0058]
120
ꢀꢀꢀꢀꢀ
车辆传感器
[0059]
125
ꢀꢀꢀꢀꢀ
接收单元
[0060]
130
ꢀꢀꢀꢀꢀ
确定单元
[0061]
135
ꢀꢀꢀꢀꢀ
传感器信息
[0062]
140
ꢀꢀꢀꢀꢀ
轨迹信息
[0063]
145
ꢀꢀꢀꢀꢀ
另外的驾驶辅助系统
[0064]
146
ꢀꢀꢀꢀꢀ
观察单元
[0065]
147
ꢀꢀꢀꢀꢀ
分析单元
[0066]
150
ꢀꢀꢀꢀꢀ
决定单元
[0067]
155
ꢀꢀꢀꢀꢀ
执行单元
[0068]
160
ꢀꢀꢀꢀꢀ
第二轨迹信息
[0069]
165
ꢀꢀꢀꢀꢀ
第二另外的驾驶辅助系统
[0070]
170
ꢀꢀꢀꢀꢀ
第三轨迹信息
[0071]
175
ꢀꢀꢀꢀꢀ
第三另外的驾驶辅助系统
[0072]
180
ꢀꢀꢀꢀꢀ
碰撞计算单元
[0073]
200
ꢀꢀꢀꢀꢀ
控制用于车辆的预测设备的方法
[0074]
210
ꢀꢀꢀꢀꢀ
接收步骤
[0075]
220
ꢀꢀꢀꢀꢀ
确定步骤
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1