一种水下机器人对接式两栖收放装置的制作方法
1.本发明涉及水下机器人回收及布放技术领域,特别涉及一种水下机器人对接式两栖收放装置。
背景技术:
2.随着海洋装备技术的发展,海洋资源的勘探和开发需求日益增大,水下机器人广泛应用于海洋资源勘探、海洋环境监测、海洋科考、水下无人作业、水下观测等领域,但现有的水下机器人在布放和回收过程中通常采用设置在甲板上的起重机械进行布放和回收,而起重机械在与水下机器人连接时需要准确地将起重机械的挂钩与水下机器人的挂钩进行对准,而且起重机械的吊放位置距离水面位置较高,易对机器人造成碰撞和损坏,作业风险高,因此该种水下机器人布放和回收方式存在对接困难、工作效率低、作业成本高等问题。
技术实现要素:
3.本发明的目的是提供一种水下机器人对接式两栖收放装置,本发明提供了一种针对水下机器人的牵引式回收布放装置,通过较大面积的牵引域以便于降低与水下机器人对接的难度,进而提高回收的效率优点。
4.本发明的上述技术目的是通过以下技术方案得以实现的:
5.一种水下机器人对接式两栖收放装置,包括:
6.载体;
7.第一滑动机构,其数量至少为两个,其设置于所述载体,相邻两个所述第一滑动机构之间留有第一间距;
8.第一牵引机构,其数量与所述第一滑动机构相匹配,其设置于所述载体上;
9.所述第一牵引机构依次绕设于相邻两个所述第一滑动机构的活动端;
10.于所述第一间距内,所述第一牵引机构形成有可与水下机器人连接的牵引域。
11.由此,本方案提供了一种针对水下机器人的牵引式回收布放装置,第一间距用于形成具有一定面积的牵引域,以降低牵引域与水下机器人的对接难度;水下机器人的顶部设有挂钩,当水下机器人进入牵引域后,通过水下机器人以及载体两者在水面上的升降,使水下机器人上的挂钩能够与第一牵引机构连接,进而实现水下机器人的回收;第一牵引机构既能为第一滑动机构活动端提供回收水下机器人的驱动力,其还能用于对水下机器人进行牵引;相对于现有技术中采用起重机械进行精准对准的回收前对接方式,本方案通过较大面积的牵引域以便于降低与水下机器人对接的难度,进而提高回收的效率。
12.在一些具体实施方式中,所述第一滑动机构包括:
13.第一滑道,其设置于所述载体上;
14.第一滑动部,其滑动连接于所述第一滑道;
15.所述第一间距形成于相邻两个所述第一滑动部之间,所述第一牵引机构依次绕设于相邻两个所述第一滑动部上。
16.在一些具体实施方式中,所述第一滑动机构包括第一直线驱动装置,其设置于所述载体上,其活动端与所述第一滑动部驱动连接。
17.由此,本方案提供了一种第一滑动机构的具体实施方式,第一直线驱动装置能够为第一滑动部提供滑动动力,以驱动第一牵引机构中的牵引域伸出载体,进而顺利与水下机器人进行对接并回收;本方案的牵引域具有可活动性,其能够适配不同挂钩位置、不同尺寸的水下机器人。
18.在一些具体实施方式中,所述第一直线驱动装置包括:
19.齿条,其设置于所述第一滑动部;
20.转动动力输出部件,其设置于所述第一滑动部内,其活动端设有齿轮;
21.所述齿轮与齿条啮合传动连接。
22.由此,本方案提供了一种第一直线驱动装置的具体结构构造,其能够通过齿轮结构的啮合连接方式为第一滑动部提供稳定的动力输出。
23.在一些具体实施方式中,包括:
24.挂绳,其两端分别连接于所述第一牵引机构在所述第一间距内的其中一部分;
25.第二牵引机构,其设置于所述载体上,其位于所述第一间距,其与所述挂绳连接;
26.于所述第二牵引机构的作用下,所述牵引域形成于所述挂绳与所述第一牵引机构之间。
27.由此,挂绳能够使牵引域具有准确的边界范围,以便于提高牵引域与水下机器人的挂钩,其次挂绳还能够使牵引域固定于第一滑动部的最远端,以便于通过第一滑动部的滑动来对牵引域的位置进行调节。
28.在一些具体实施方式中,包括第一挂环,所述挂绳穿设于所述第一挂环内,所述第一挂环与所述第二牵引机构连接。
29.由此,本方案提供了一种挂绳与第二牵引机构的连接方式,第二牵引机构包括第二牵引转动装置和第二牵引绳,第二牵引绳系在第一挂环上,进而实现第二牵引机构与挂绳的连接;第一挂环能够为挂绳提供良好的受力支撑。
30.在一些具体实施方式中,所述第二牵引机构连接于所述挂绳的中部,使所述牵引域呈三角形。
31.由此,三角形的结构可使得牵引域的受力结构更为稳定,以便于提高牵引域与水下机器人牵引过程的稳定性。
32.在一些具体实施方式中,所述第一牵引机构包括:
33.第一牵引转动装置,其数量与所述第一滑动机构的数量相匹配,其设置于所述载体上;
34.第一牵引绳,其数量与所述第一牵引转动装置相匹配,其一端绕设于所述第一牵引转动装置的活动端上,其另一端经过所述第一滑动部后与另一条所述第一牵引转动装置所对应的第一牵引绳连接;
35.所述牵引域形成于相邻两条所述第一牵引绳之间。
36.由此,本方案提供了一种第一牵引机构的具体结构构造,通过第一牵引转动装置来带动第一牵引绳的回收,进而实现对牵引域中的水下机器人的回收。
37.在一些具体实施方式中,包括:
38.安装架,其设置于所述第一滑动机构的活动端上,其具有安装内腔;
39.定滑轮副,其数量至少为两个且并排设置于所述安装内腔内;
40.所述第一牵引绳同时穿设于相邻所述定滑轮副之间。
41.由于第一滑动机构的活动端为第一滑动部,因此本方案提供了一种第一牵引绳与第一滑动部的具体连接方式,其中一个定滑轮副能够使第一牵引绳的回收更加顺畅,另一个定滑轮副能够为第一牵引绳提供限位,使得第一牵引绳始终位于两个定滑轮副之间,即使第一牵引绳在松开的状态下仍然保持与第一滑动部的连接。
42.在一些具体实施方式中,包括:
43.支架,其设置于所述载体,其具有可供水下机器人滑入的定位通道;
44.夹持部,其数量为若干个且绕着所述定位通道圆周布置,其转动式设置于所述支架上;
45.第二直线驱动装置,其设置于所述支架上,其活动端与所述夹持部连接,其能够驱动所述夹持部对水下机器人进行夹持;
46.导向罩,其数量为若干个且绕着所述定位通道圆周布置,其设置于所述夹持部上。
47.由此,夹持部与水下机器人的外侧壁相匹配,导向罩由连接块和若干条导向条构成,导向条均布于连接块上,导向条呈倾斜布置,导向罩可便于水下机器人进入。由此,夹持部能够将回收后的水下机器人固定于载体上。
48.综上所述,本发明提供了一种针对水下机器人的牵引式回收布放装置,通过较大面积的牵引域以便于降低与水下机器人对接的难度,进而提高回收的效率;而且本方案还提供了一种对接式两栖收放装置,其可实现机器人进行水中对接、水中布放回收,同时可满足该机器人进行陆地转运的需求。
附图说明
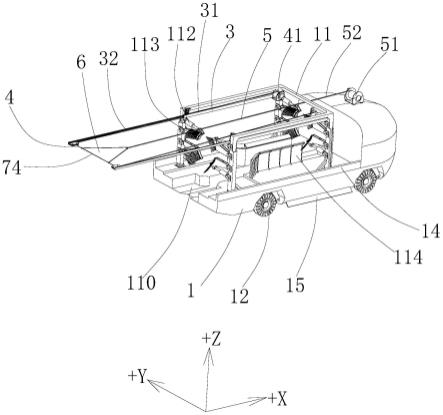
49.图1是本实施例的结构示意图;
50.图2是水下机器人与载体的位置关系示意图;
51.图3是图2中a处的放大图;
52.图4是图2中b处的放大图;
53.图5是图2中c处的放大图;
54.图6是图2中d处的放大图;
55.图7是图2中e处的放大图;
56.图8是图2中f处的放大图;
57.图9是图2中g处的放大图;
58.图10是水下机器人与载体的另一视角的位置关系示意图;
59.图11是本发明中转动动力输出部件与齿轮的连接关系示意图。
60.附图标记:1、载体;10、第一间距;11、支架;110、定位通道;111、夹持部;112、第二直线驱动装置;113、导向罩;114、导向板;12、行走驱动机构;14、甲板;15、横向稳定机构;2、水下机器人;21、挂钩;3、第一滑动机构;31、第一滑道;32、第一滑动部;33、第一直线驱动装置;331、齿条;332、转动动力输出部件;333、齿轮;4、第一牵引机构;41、第一牵引转动装置;42、第一牵引绳;5、第二牵引机构;51、第二牵引转动装置;52、第二牵引绳;6、牵引域;71、第
一挂环;72、第二挂环;73、第三挂环;74、连接绳;75、挂绳;90、安装架;901、安装内腔;91、定滑轮副。
具体实施方式
61.下面结合附图对本发明作进一步详细的说明,为更好的对一种水下机器人对接式两栖收放装置进行说明,引用了x、y、z轴概念,取相互正交的三个空间轴为x轴、y轴、z轴,如图1至图10的坐标轴所示,定义+x轴方向为载体的前进方向,定义-x轴为载体的退后方向,定义y轴为载体的宽度方向,定义-z轴为重力方向。实施例中的前后或上下方向的移动或沿x轴、y轴、z轴方向移动并不限定于垂直、水平或平行与该方向的移动,有倾斜角度的移动也可以,只要存在该方向上分量的移动都算在内。
62.实施例:
63.一种水下机器人对接式两栖收放装置,包括:载体1、支架11、第一滑动机构3、第一牵引机构4,具体如下:
64.水下机器人2的顶部设有挂钩21;水下机器人2自身具备导航、定位、远程遥控等常见auv的功能。
65.载体1,其主要由船体骨架、板材、压载舱等构成,其自身搭载有浮力调节机构,可通过浮力调节机构来改变载体1的吃水量进而实现上浮和下潜。浮力调节机构主要用于改变载体1与水下机器人2的吃水量,以防止避免岁下机器人与载体1发生碰撞。载体1搭载水下机器人2对接固定装置,其可实现水下机器人2的固定装载,搭载牵引装置可实现水下机器人2的牵引对接,同时为载体1内的柴油发电机组、液压站、压载泵、第一牵引机构4等设备提供安装平台。
66.考虑到现有起重机械在完成水下机器人2的吊放回收后,需要对水下机器人2进行二次转运,因此现有技术中需要另行准备转运装置;在本方案,载体1的底部设有行走驱动机构12,行走驱动机构12用于支撑收放装置,包括前后总共四组行走驱动机构12,行走驱动机构12由实心轮胎及轮辋、行走减速机、连接杆、活塞杆、安装底座等组成。行走驱动机构12具备行走,爬坡、越障、制动等能力,通过左右两侧驱动轮的差速控制实现转向功能。
67.载体1搭载有船载动力模块,船载动力模块为液压系统、电控系统、压载泵系统、推进系统等提供动力,动力模块采用船载柴油发电机组。液压系统包括液压站、液压控制系统、液压管路、液压附件等部分组成,为第二直线驱动装置112(夹紧油缸)、第一直线驱动装置33(升降马达)、行走驱动机构12、悬挂油缸等执行机构提供动力源。
68.载体1的两侧搭载有横向稳定机构15,横向稳定机构15用于对水下机器人2牵引拖拽过程中控制第一牵引机构4的横向摆动,以便于顺利完成水下机器人2的引导对接,横向稳定机构15主要包括船鳍和两侧的推进机构。
69.载体1上设有其中一端能够倾斜的甲板14,甲板14的其中一端底部设有升降油缸,升降油缸能够将甲板14举起,以用于水下机器人2的布放。
70.支架11设置于载体1,支架11为框架结构;
71.第一滑动机构3的数量至少为两个,具体地,在本实施例中第一滑动机构3的数量为两个,其分别设置于载体1的支架11两侧,相邻两个第一滑动机构3之间留有第一间距10;
72.在本实施例中,第一滑动机构3包括:第一滑道31、第一滑动部32、第一直线驱动装
置33,具体如下:
73.第一滑道31设置于载体1上;第一滑动部32滑动连接于第一滑道31;第一间距10形成于相邻两个第一滑动部32之间,第一牵引机构4依次绕设于相邻两个第一滑动部32上。
74.第一直线驱动装置33设置于载体1上,第一直线驱动装置33的活动端与第一滑动部32驱动连接。由此,本方案提供了一种第一滑动机构3的具体实施方式,第一直线驱动装置33能够为第一滑动部32提供滑动动力,以驱动第一牵引机构4中的牵引域6伸出载体1,进而顺利与水下机器人2进行对接并回收;本方案的牵引域6具有可活动性,其能够适配不同挂钩21位置、不同尺寸的水下机器人2。
75.在本实施例中,第一直线驱动装置33包括:齿条331、转动动力输出部件332,具体如下:
76.齿条331设置于第一滑动部32上;转动动力输出部件332设置于第一滑动部32内,转动动力输出部件332活动端设有齿轮333;齿轮333与齿条331啮合传动连接。由此,本方案提供了一种第一直线驱动装置33的具体结构构造,其能够通过齿轮333结构的啮合连接方式为第一滑动部32提供稳定的动力输出。
77.在本实施例中,第一牵引机构4的数量与第一滑动机构3相匹配,其设置于载体1上;
78.第一牵引机构4依次绕设于相邻两个第一滑动机构3的活动端;
79.于第一间距10内,第一牵引机构4形成有可与水下机器人2连接的牵引域6。
80.第一牵引机构4包括:第一牵引转动装置41和第一牵引绳42,具体如下:
81.第一牵引转动装置41,其数量与第一滑动机构3的数量相匹配,其设置于载体1上;第一牵引绳42,其数量与第一牵引转动装置41相匹配;在本实施例中,第一牵引转动装置41和第一牵引绳42的数量为两个,其分别设置于两个第一滑动机构3上。
82.第一牵引绳42其一端绕设于第一牵引转动装置41的活动端上,其另一端经过第一滑动部32后与另一条第一牵引转动装置41所对应的第一牵引绳42连接;优选地,第一牵引绳42、第二牵引绳52、连接绳74均为绳索。
83.具体地,本一种水下机器人对接式两栖收放装置还包括:连接绳74、第二挂环72、第三挂环73;
84.其中一条第一牵引绳42连接于第二挂环72,另一条第一牵引绳42连接于第三挂环73,第二挂环72和第三挂环73分别设置于连接绳74的两端。
85.牵引域6形成于相邻两条第一牵引绳42之间。由此,本方案提供了一种第一牵引机构4的具体结构构造,通过第一牵引转动装置41来带动第一牵引绳42的回收,进而实现对牵引域6中的水下机器人2的回收。
86.一种水下机器人对接式两栖收放装置还包括挂绳75,其两端分别连接于第一牵引机构4在第一间距10内的其中一部分,具体地,挂绳75的两端分别连接于第二挂环72和第三挂环73上,该连接方式具体为系缚。
87.第二牵引机构5,其设置于载体1上,其位于第一间距10,其与挂绳75连接;
88.于第二牵引机构5的作用下,牵引域6形成于挂绳75与第一牵引机构4之间。由此,挂绳75能够使牵引域6具有准确的边界范围,以便于提高牵引域6与水下机器人2的挂钩21,其次挂绳75还能够使牵引域6固定于第一滑动部32的最远端,以便于通过第一滑动部32的
滑动来对牵引域6的位置进行调节。
89.一种水下机器人对接式两栖收放装置还包括第一挂环71,挂绳75穿设于第一挂环71内,第一挂环71与第二牵引机构5连接。第一挂环71呈圆环型。由此,本方案提供了一种挂绳75与第二牵引机构5的连接方式,第二牵引机构5包括第二牵引转动装置51和第二牵引绳52,第二牵引绳52系在第一挂环71上,进而实现第二牵引机构5与挂绳75的连接;第一挂环71能够为挂绳75提供良好的受力支撑。
90.第一挂环71位于挂绳75的中部,使得第二牵引机构5连接于挂绳75的中部,进而使牵引域6呈三角形。由此,三角形的结构可使得牵引域6的受力结构更为稳定,以便于提高牵引域6与水下机器人2牵引过程的稳定性。
91.优选地,本实施例还包括:安装架90、定滑轮副91,具体如下:
92.安装架90,其设置于第一滑动机构3的活动端上,其具有安装内腔901;定滑轮副91,其数量至少为两个且并排设置于安装内腔901内;第一牵引绳42同时穿设于相邻定滑轮副91之间。
93.由于第一滑动机构3的活动端为第一滑动部32,因此本方案提供了一种第一牵引绳42与第一滑动部32的具体连接方式,其中一个定滑轮副91能够使第一牵引绳42的回收更加顺畅,另一个定滑轮副91能够为第一牵引绳42提供限位,使得第一牵引绳42始终位于两个定滑轮副91之间,即使第一牵引绳42在松开的状态下仍然保持与第一滑动部32的连接。
94.支架11具有可供水下机器人2滑入的定位通道110;载体1的上表面设有沿着定位通道110布置的两个导向板114,相邻两个导向板114之间形成有可供水下机器人2进入的导向槽;
95.优选地,本实施例的一种水下机器人对接式两栖收放装置还包括水下机器人2对接固定机构,水下机器人2对接固定机构为两组分别设置于支架11上且位于定位通道110沿着+x轴方向的前后两端;
96.水下机器人2对接固定机构包括:夹持部111、第二直线驱动装置112、导向罩113,具体如下:
97.夹持部111,其数量为若干个且绕着定位通道110圆周布置,其转动式设置于支架11上;
98.第二直线驱动装置112,其设置于支架11上,其活动端与夹持部111连接,其能够驱动夹持部111对水下机器人2进行夹持;第二直线驱动装置112为液压缸,其与载体1中所搭载的液压站连接;
99.导向罩113,其数量为若干个且绕着定位通道110圆周布置,其设置于夹持部111上。优选地,每组水下机器人2对接固定机构中的夹持部111和导向罩113的数量为四个,四个导向罩113能够呈漏斗型开口,漏斗型开口直径大的一侧用于与水下机器人2对接,以便于提高水下机器人2在载体1上的导向。
100.由此,夹持部111与水下机器人2的外侧壁相匹配,导向罩113由连接块和若干条导向条构成,导向条均布于连接块上,导向条呈倾斜布置,导向罩113可便于水下机器人2进入。由此,多个夹持部111的闭合能够将回收后的水下机器人2固定于载体1上,多个夹持部111的张开能够实现水下机器人2的解锁。
101.回收工作过程
102.首先,通过第一直线驱动装置33使第一滑动部32以及牵引域6沿着-x轴方向伸出于载体1;控制水下机器人2与载体1的吃水量,使载体1上的第一牵引机构4在海面高度(沿着z轴)高于水下机器人2的挂钩21;然后,控制水下机器人2移动至位于牵引域6内;随后控制水下机器人2与载体1的吃水量,使载体1上的第一牵引机构4与水下机器人2的挂钩21位于同一海面高度上;
103.然后,第一牵引机构4和第二牵引机构5同时驱动第一滑动部32以及牵引域6往+x轴方向移动,此时,水下机器人2的挂钩21被牵引域6中的第一牵引绳42往+x轴方向移动,直至水下机器人2沿着导向罩113进入定位通道110内;
104.最后,通过第二直线驱动装置112驱动若干个夹持部111往水下机器人2靠近,进而将水下机器人2夹持锁定于载体1上。根据需要可直接在水面或陆地上行驶,进而实现水下机器人2的快速转运。
105.布放工作过程
106.首先,通过第二直线驱动装置112驱动若干个夹持部111往水下机器人2方向远离,使水下机器人2从载体1上解锁;然后,通过升降油缸驱动甲板14升起,水下机器人2在重力的作用下投放至海里,进而完成水下机器人2的布放。
107.有益效果
108.本发明针对水下机器人2的两栖需求,现提供了一种对接式两栖收放装置,其可实现机器人进行水中对接、水中布放回收,同时可满足该机器人进行陆地转运的需求。
109.本方案提供了一种针对水下机器人2的牵引式回收布放装置,第一间距10用于形成具有一定面积的牵引域6,以降低牵引域6与水下机器人2的对接难度;当水下机器人2进入牵引域6后,通过水下机器人2以及载体1两者在水面上的升降,使水下机器人2上的挂钩21能够与第一牵引机构4连接,进而实现水下机器人2的回收;第一牵引机构4既能为第一滑动机构3活动端提供回收水下机器人2的驱动力,其还能用于对水下机器人2进行牵引;相对于现有技术中采用起重机械进行精准对准的回收前对接方式,本方案通过较大面积的牵引域6以便于降低与水下机器人2对接的难度,进而提高回收的效率。
110.本方案可提高水下机器人2的布放作业的便捷性和经济性,为水下机器人2的布放和回收提供一种新的有效的手段。
111.本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1