一种危化品运输车防侧翻预警方法
1.本发明涉及车辆运输安全技术领域,尤其涉及一种危化品运输车防侧翻预警方法。
背景技术:
2.危化品运输车是装运液态物品的专用罐式车辆,目前我国的液体危化品大部分靠此类特种车辆进行公路运输。危化品运输车作为一种特殊的专用汽车,具有承载重、质心高、体积大的特点,且液罐车在运输行驶时,液罐中未装满会留有一定的空隙,液体在容器中前后、左右波动,若容器的容量很大,则波动的动能就很大,质心的变化也就很大,将引起车辆轴荷的剧烈变化,严重影响汽车行驶的安全稳定性,容易发生侧翻,造成严重的交通事故。液罐车运输的危化品液体又是较为敏感的物品,如果在运输途中发生侧翻造成泄漏,不仅会造成严重的经济损失和环境污染,还会危及周边居民的人身安全。
3.目前的车辆侧倾预警方法都是依靠侧倾角,侧向加速度以及横向载荷转移率3种车辆侧翻评价指标。当传感器监控到这三种评价指标超过提前设定的侧翻阈值时预警,但此时车辆已临近侧翻状态,留给驾驶员的反应时间过少,缺少了侧翻预警的实时性。
技术实现要素:
4.发明目的:针对现有技术中存在的问题,本发明通过实时监控罐体某几个截面的液体表面位置,从而推断罐体质心位置,由于液体晃动在罐体中传递需要时间,利用其传递滞后性,可预测整个罐体中液体质心传递轨迹与罐车侧倾角变化,以预测的车辆侧倾角峰值是否超过罐车侧翻阈值,提前预警驾驶员侧翻风险,给驾驶员一定的反应时间,从而实现车辆防侧翻预警的实时性。
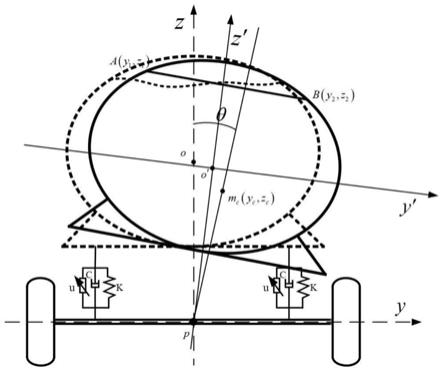
5.技术方案:本发明公开了一种危化品运输车防侧翻预警方法,危化品液罐车在行驶过程中当前轮受到特殊路面激励,灌内液体发生左右晃动,晃动状态从罐体头部传递至尾部,在罐体等长处选取多个截面安装液位传感器,液位传感器可实时监测罐内液体表面与罐体交点a(y1,z1),b(y2,z2)的位置,通过a,b的位置可计算罐体的质心位置,计算方法如下:
6.步骤1:转换坐标系。
7.在车轴中心处建立直角坐标系yoz,由于液位传感器设置于罐体内部,会随着罐体一起晃动,在晃动过程中坐标系也会跟着变化,在车轴中心处与罐体中心处设置有位置传感器,可测得罐体中心相对于车轴中心坐标系在y轴与z轴的侧偏量和则罐体中心的侧倾角为:
[0008][0009]
罐体晃动时,罐体在坐标系yoz上的椭圆方程为:
[0010][0011][0012]
a,b分别是椭圆罐体的短轴与长轴。
[0013]
液位传感器在y
′o′z′
坐标系中监测得a(y
′1,z
′1)和b(y
′2,z
′2)两点的坐标,将这两点坐标变化到yoz坐标系上表示:
[0014][0015]
则在y
′o′z′
坐标系中监测得到的a(y
′1,z
′1)和b(y
′2,z
′2)可变化成a(y1,z1)和b(y2,z2),液体自由面可近似看做a(y1,z1),b(y2,z2)两点组成的直线,其直线方程为:
[0016][0017]
步骤2:计算罐体质心坐标。
[0018]
晃动罐体某一截面d处罐体的横截面积为:
[0019][0020]
截面d对应y轴坐标的截面面积距为:
[0021][0022]
截面d对应z轴坐标的截面面积距为:
[0023][0024]
则该截面的质心坐标为:
[0025]
xc=xd[0026]
[0027][0028]
步骤3:预测罐体质心位置。
[0029]
在罐体上选取多个截面安装液位传感器,实时检测液面质心位置,在液体晃动传递过程中可推断出多个截面的质心位置c1、c2、c3....cm,进而通过最小二乘法多项式拟合质心传递轨迹:
[0030]
f(x)=a1c1(x)+a2c2(x)+a3c3(x)+
…
+a
mcm
(x)
[0031]
a1、a2、a3....am为质心轨迹待定系数。
[0032]
步骤4:计算罐体质心侧倾角。
[0033]
则罐体截面的质心侧偏角为:
[0034][0035]
分别表示坐标系y
′o′z′
相对于车轴中心p点在y轴与z轴的偏移量。
[0036]
通过拟合轨迹预测后续质心偏移位置,提前计算并设定质心偏移角阈值θk和-θk为一侧车轮载荷为0时罐内液体质心的偏移位置,当车辆受到路面不平激励或转弯时,罐内液体晃动质心偏移量超过所设阈值θk或-θk,由于车辆左右惯性力矩的影响,此时罐体头部有侧倾风险,而车辆还未达到侧翻状态,车辆可在这段时间内通过驾驶室显示屏和报警器对驾驶员发出侧翻风险预警。
[0037]
有益效果
[0038]
与现有的预警系统相比,本发明通过预测质心轨迹的方式,避免在汽车临近侧翻状态时预警,留给驾驶员足够的反应时间,实现了侧翻预警的实时性。本发明在经过步骤一坐标系变化后,避免了罐体装载不同充液比时质心计算公式不同的问题,即该方法适用于罐内装载任意充液比的危化品运输车。本发明实时监测罐内液体质心的变化,使得预警更加准确,可靠性更高,且预警方法更简洁效果更加显著,可以作为后续液罐车防侧翻控制的重要前置研究。
附图说明
[0039]
图1为本发明的车辆侧倾状态示意图;
[0040]
图2为本发明的罐体坐标系转换示意图;
[0041]
图3为本发明的运输车罐体质心预测轨迹示意图;
[0042]
图4为本发明的危化品运输车防侧翻预警方法流程图。
具体实施方式
[0043]
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
[0044]
结合附图1-4说明,本发明通过在罐体上选取距离相等的截面上安装液面传感器,监测液体表面与罐体的交点a(y1,z1)、b(y2,z2)。通过a、b两点推断该截面的质心位置,再通过在车轴中心p与罐体中心o处安装位置传感器,监测罐体在y轴z轴的偏移量,最后推断出
罐体质心的侧倾角,同理,推断出选取的另外截面质心位置,通过推断出的质心位置预测质心传递轨迹,对比提前设定的质心侧倾角阈值θk和-θk,当θ≥θk或θ≤-θk时,车辆控制单元控制驾驶室的显示屏和报警器向驾驶员发出侧翻预警。
[0045]
具体包括如下步骤:
[0046]
步骤1:转换坐标系。
[0047]
在车轴中心p处建立直角坐标系yoz,由于液位传感器设置于罐体内部,会随着罐体一起晃动,在晃动过程中坐标系也会跟着变化,在车轴中心p处与罐体中心o处设置有位置传感器,可测得罐体中心相对于车轴中心坐标系在y轴与z轴的侧偏量和则罐体中心的侧倾角为:
[0048][0049]
罐体晃动时,罐体在坐标系yoz上的椭圆方程为:
[0050][0051][0052]
a,b分别是椭圆罐体的短轴与长轴。
[0053]
液位传感器在y
′o′z′
坐标系中监测得a(y
′1,z
′1)和b(y
′2,z
′2)两点的坐标,将这两点坐标变化到yoz坐标系上表示:
[0054][0055]
则在y
′o′z′
坐标系中监测得到的a(y
′1,z
′1)和b(y
′2,z
′2)可变化成a(y1,z1)和b(y2,z2),液体自由面可近似看做a(y1,z1),b(y2,z2)两点组成的直线,其直线方程为:
[0056][0057]
步骤2:计算罐体质心坐标。
[0058]
晃动罐体某一截面d处罐体的横截面积为:
[0059][0060]
截面d对应y轴坐标的截面面积距为:
[0061][0062]
截面d对应z轴坐标的截面面积距为:
[0063][0064]
则该截面的质心坐标为:
[0065]
xc=xd[0066][0067][0068]
步骤3:预测罐体质心位置。
[0069]
在罐体上选取多个截面安装液位传感器,实时检测液面质心位置,在液体晃动传递过程中可推断出多个截面的质心位置c1、c2、c3....cm,进而通过最小二乘法多项式拟合质心传递轨迹:
[0070]
f(x)=a1c1(x)+a2c2(x)+a3c3(x)+
…
+a
mcm
(x)
[0071]
a1、a2、a3....am为质心轨迹待定系数。
[0072]
步骤4:计算罐体质心侧倾角。
[0073]
则罐体截面的质心侧偏角为:
[0074][0075]
分别表示坐标系y
′o′z′
相对于车轴中心p点在y轴与z轴的偏移量。在实施例中,如图3所示,当车辆进行转弯时,车辆前轮首先进行横摆,运输车罐体受前轮转角的作用,罐内液体开始晃动,前轮头部质心侧偏,罐体监控单元将监控到的罐内液体位置和罐体侧偏量的数据参数传至车载ecu,经过计算可推断出罐体质心偏移位置以及罐体侧偏角,还可通过拟合方法预测液体晃动从罐体头部传至尾部的质心偏移轨迹,提前将一侧车轮载荷为0时的侧偏角θ=θk或θ=-θk设为侧翻预警的阈值,由于罐体头部率先受到工况影响而侧倾,所以头部罐体截面质心侧倾角先达到θ=θk或θ=-θk,此时罐体有惯性力矩的作用,罐体未达到侧翻状态,可通过预测的质心偏移轨迹预测罐体的质心侧倾角满足θ≤-θk或θ≥θk时,车载ecu控制驾驶室的显示屏和蜂鸣报警器向驾驶员预警侧翻风险。
[0076]
上述实施方式只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。本发明的罐体
形状不局限与椭圆,其他形状的罐体经过简单变换同样适用,故凡根据本发明精神实质所做的等效变换或修饰,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1