跟驰状态下驾驶辅助功能辅助边界模型构建方法及系统与流程
本发明涉及汽车驾驶辅助,特别是涉及一种跟驰状态下驾驶辅助功能辅助边界模型构建方法及系统。
背景技术:
1、自动驾驶技术近年来快速发展,saej3016将自动驾驶分为l0~l5共6等级,自动驾驶功能的普及有助于减少驾驶员疲劳,减少交通事故等。当前阶段下,大部分装备驾驶辅助功能的量产车集中在l1~l2等级,属于部分自动化与有条件自动化阶段,存在驾驶权限划分的一系列问题,且由于测试、标准等关键技术问题尚未解决,高级别自动驾驶的普及还需要一段时期的发展与沉淀。故研究“人”与“机”的交互行为在当前技术环境下尤为重要。
2、早期的驾驶权限研究中,人们大多关注于控制权的切换相关的交互行为,将控制车辆的方式机械地二分为驾驶员控制与系统控制,只关注随着研究的不断深入,驾驶过程中控制权实时分配的相关控制研究逐渐受到重视。但如果驾驶辅助功能时刻接入系统,则会使得驾驶员对于驾驶的注意力分散,驾驶能力下降,故驾驶辅助功能应选择合适的时机对驾驶员的驾驶行为进行辅助介入。samyeul等设计的人机共驾系统将碰撞时间(ttc)、最小安全距离、刹车时间(ttb)三种指标作为驾驶风险评估的输入,实现了基于行驶环境的实时控制权分配。saleh等人通过构建驾驶员模型,向协同控制器中加入驾驶员行为因子的方式优化了人机协同控制规则,使得驾驶员的主观体验得到提升。此外,运用博弈论、微分博弈论、t-s模糊控制理论、线性矩阵不等式优化的途径对车辆控制权限进行分配的研究也被各国学者提出。
3、通过对当前学界的研究现状分析,可以发现当前对驾驶辅助介入研究的一般思路分为定义相关风险指标、运用相关理论进行建模分析、验证模型有效性三大模块。其间可以融入驾驶员行为因子等相关参数进行模型优化,但在技术路线中,参与建模的参数主要为车辆行驶状态参数、环境参数等面向“机”的参数,与“人”相关的人因参数关注度明显不够,反应能力、脑负荷、认知能力等人因问题在切换驾驶控制权过程中的安全性、平顺性和舒适性上也有着直接影响。
技术实现思路
1、本发明的目的是提供一种跟驰状态下驾驶辅助功能辅助边界模型构建方法及系统,通过风险指标和误差指标构建驾驶能力边界模型后,进一步利用驾驶员的生理数据进行模型验证,引入了人相关的人因参数,提高了驾驶能力边界模型的准确性,进而准确的判断纵向驾驶辅助功能介入的时机。
2、为实现上述目的,本发明提供了如下方案:
3、一种跟驰状态下驾驶辅助功能辅助边界模型构建方法,所述方法包括:
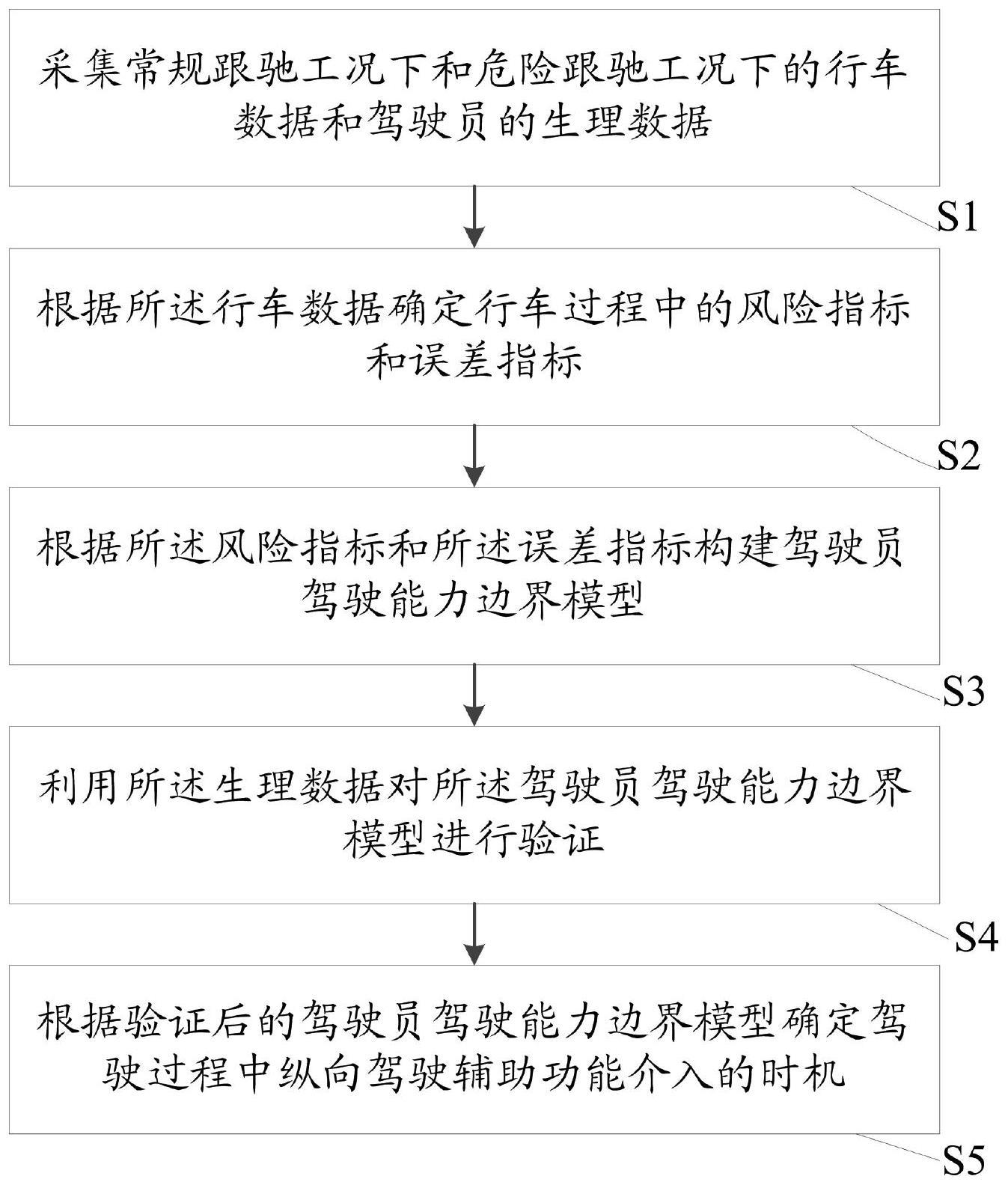
4、采集常规跟驰工况下和危险跟驰工况下的行车数据和驾驶员的生理数据;所述常规跟驰工况和所述危险跟驰工况中包含有多种模拟事件;所述模拟事件为干扰驾驶员注意力的事件;
5、根据所述行车数据确定行车过程中的风险指标和误差指标;
6、根据所述风险指标和所述误差指标构建驾驶员驾驶能力边界模型;
7、利用所述生理数据对所述驾驶员驾驶能力边界模型进行验证;
8、根据验证后的驾驶员驾驶能力边界模型确定驾驶过程中纵向驾驶辅助功能介入的时机。
9、可选的,采集正常跟驰工况下和危险跟驰工况下的行车数据和驾驶员的生理数据,具体包括:
10、构建所述常规跟驰工况和所述危险跟驰工况的工况场景;所述工况场景中设置有多种模拟事件;
11、获取若干驾驶员在所述工况场景下的行车数据和生理数据。
12、可选的,所述常规跟驰工况包括跟随巡航工况、前车切入工况和前车驶离工况。
13、可选的,根据所述行车数据确定行车过程中的风险指标和误差指标,具体包括:
14、根据所述行车数据中自车车身、前车车身和跟车距离选取碰撞时间的倒数作为风险指标;
15、将自车传感器采集的图像输入到端到端驾驶行为模型,得到理想驾驶员操作车辆的加速度;
16、根据所述行车数据中驾驶员实际操作车辆的加速度和所述理想驾驶员操作车辆的加速度确定误差指标;所述误差指标指实际驾驶操作与理想驾驶操作产生的偏差程度;所述驾驶员实际操作车辆的加速度和所述理想驾驶员操作车辆的加速度的时刻是一一对应的。
17、可选的,所述驾驶员驾驶能力边界模型的表达式为:
18、dl4b={x∈r|(g-g1)·x+|g1(x-xi)|>g2}
19、其中,
20、
21、
22、
23、式中,dlab表示驾驶员驾驶能力边界;xi=[ah,vh,vl,l]t,ah为i时刻自车加速度样本;vh为i时刻自车车速样本,vl为i时刻前车车速样本,l为i时刻跟车距离样本;x表示驾驶能力边界对应的行车数组集合,行车数组包括自车加速度、自车车速、前车车速和跟车距离;为fcdf(pμ|μ,σ)的反函数,pμ取lnea的最大值;为的反函数,eai表示i时刻的误差指标ea;n表示样本量;表示风险指标。
24、可选的,所述生理数据包括脑电信号和心跳频率。
25、可选的,利用所述生理数据对所述驾驶员驾驶能力边界模型进行验证,具体包括:
26、在所述生理数据对应的所有所述模拟事件中,确定所述风险指标和所述误差指标超出阈值的事件数量占比;
27、根据所述事件数量占比的大小验证所述驾驶员驾驶能力边界模型的有效性。
28、本发明还提供一种跟驰状态下驾驶辅助功能辅助边界模型构建系统,所述系统包括:
29、数据采集模块,用于采集常规跟驰工况下和危险跟驰工况下的行车数据和驾驶员的生理数据;所述常规跟驰工况和所述危险跟驰工况中包含有多种模拟事件;所述模拟事件为干扰驾驶员注意力的事件;
30、指标定义模块,用于根据所述行车数据确定行车过程中的风险指标和误差指标;
31、驾驶能力边界模型构建模块,用于根据所述风险指标和误差指标构建驾驶员驾驶能力边界模型;
32、模型验证模块,用于利用所述生理数据对所述驾驶员驾驶能力边界模型进行验证;
33、介入判断模块,用于根据验证后的驾驶员驾驶能力边界模型确定驾驶过程中纵向驾驶辅助功能介入的时机。
34、可选的,所述数据采集模块具体包括:
35、场景构建单元,用于构建所述常规跟驰工况和所述危险跟驰工况的工况场景;所述工况场景中设置有多种模拟事件;
36、数据采集单元,用于获取若干驾驶员在所述工况场景下的行车数据和生理数据。
37、可选的,所述指标定义模块具体包括:
38、风险指标选取单元,用于根据所述行车数据中自车车身、前车车身和跟车距离选取碰撞时间的倒数作为风险指标;
39、理想值输出单元,用于将自车传感器采集的图像输入到端到端驾驶行为模型,得到理想驾驶员操作车辆的加速度;
40、误差指标确定单元,用于根据所述行车数据中驾驶员实际操作车辆的加速度和所述理想驾驶员操作车辆的加速度确定误差指标;所述误差指标指实际驾驶操作与理想驾驶操作产生的偏差程度;所述驾驶员实际操作车辆的加速度和所述理想驾驶员操作车辆的加速度的时刻是一一对应的。
41、根据本发明提供的具体实施例,本发明公开了以下技术效果:
42、本发明提供一种跟驰状态下驾驶辅助功能辅助边界模型构建方法及系统,采集了驾驶员在自然、危险工况下的多种驾驶能力对应的行车数据,并选取、设计了风险指标与误差指标参与驾驶员驾驶能力边界模型的构建。通过多模态生理数据,从客观上对本文构建的纵向驾驶员能力边界模型的有效性进行了验证。本发明通过风险指标和误差指标构建驾驶能力边界模型后,进一步利用驾驶员的生理数据进行模型验证,引入了人相关的人因参数,提高了驾驶能力边界模型的准确性,进而准确的判断纵向驾驶辅助功能介入的时机。
- 还没有人留言评论。精彩留言会获得点赞!