一种多站间运行的速度曲线制定方法及系统与流程
本发明涉及轨道交通,特别涉及一种多站间运行的速度曲线制定方法及系统。
背景技术:
1、列车自动驾驶(ato, automatic train operation)系统利用地面信息实现对列车的牵引、制动控制以及列车自动折返。ato系统实现列车自动驾驶,在列车自动防护(atp,automatic train protection)的防护下完成列车自动驾驶控制,实现对车辆的牵引、制动、巡航等控制。
2、高速铁路列车在运行过程中可能因灾害天气、设备故障等因素而发生晚点,前行列车晚点或将导致后行列车的连带晚点。列车晚点发生后,原定的列车到发线运用计划很可能存在冲突,如果按原定计划安排列车的接发车作业,很可能会降低局部路网的运输效率。此时,列车调度员可以调整列车的到发线运用计划,疏解列车到发线运用冲突,从而减少列车的晚点。
3、为了保证列车的准点运行,ato在按照线路限速以及atp的防护速度曲线运行的过程中,无法保证列车运行到下一站的时间与该列车运行时刻表上所规定的到站时间之间不会存在较大的时间差。尤其是当列车在区间行车过程中,列车可能出现因为其他原因临时停车,当ato仍然按照固定限速等级运行速度行车,则可能造成晚点,如果按照最快速度行车,则可能造成提前到站,影响其它列车的运行时刻表,或者影响站台的其他作业,例如轨道检查、清扫等。
4、综上所述,亟需一种针对前车列车晚点或故障引起的连带晚点时自动变更发线运用计划的方法。
技术实现思路
1、针对上述问题,本发明提供一种多站间运行的速度曲线制定方法及系统,用于解决针对前车列车晚点或故障引起的连带晚点时自动变更发线运用计划的问题,适用于自动驾驶多站间运行时分规划的推荐速度曲线计算。
2、一种多站间运行的速度曲线制定方法,所述方法包括:
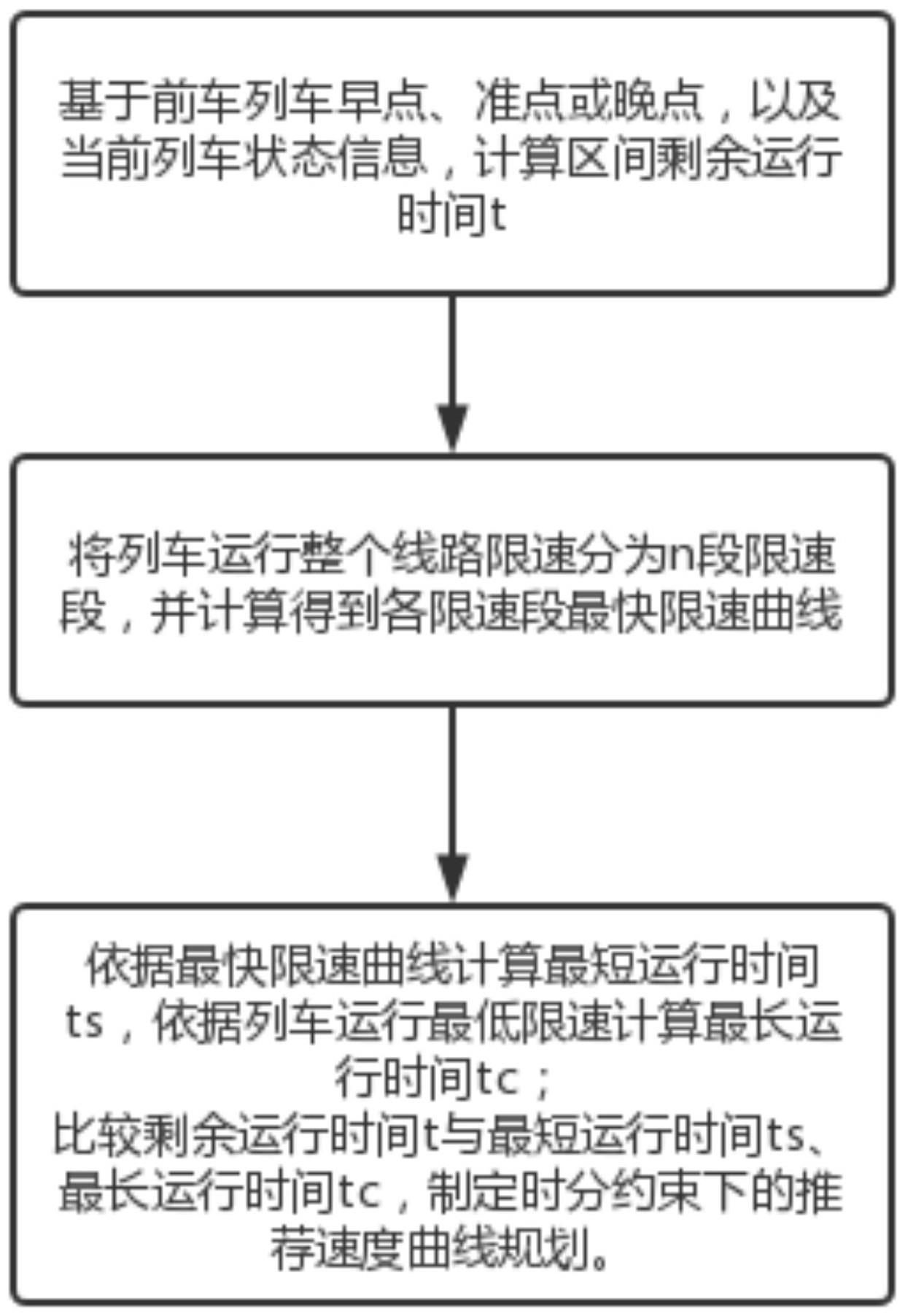
3、基于前车列车早点、准点或晚点,以及当前列车状态信息,计算区间剩余运行时间t;
4、将列车运行整个线路限速分为n段限速段,并计算得到各限速段最快限速曲线;
5、依据最快限速曲线计算最短运行时间ts,依据列车运行最低限速计算最长运行时间tc;
6、比较剩余运行时间t与最短运行时间ts、最长运行时间tc,制定时分约束下的推荐速度曲线规划。
7、进一步的,所述当前列车状态信息,具体包括:
8、当前时间、到站时间、当前列车与目标车站距离,以及线路限速。
9、进一步的,所述计算区间剩余运行时间t,具体包括:
10、分区间计算区间剩余运行时间t,区间剩余运行时间表示列车当前时刻距前方到达站规定到达时刻的时间,表示如下:
11、t= t前方到达站的时刻-t当前时刻。
12、进一步的,所述计算得到各限速段最快限速曲线,具体包括:
13、依次计算牵引最快限速曲线、制动最快限速曲线、牵引制动融合限速曲线和牵引制动延时约束下最快限速曲线。
14、进一步的,所述计算牵引最快限速曲线,具体包括:
15、若第i-1限速段限速对应的牵引最快限速vtx_i-1小于第i限速段线路限速vi,其中vtx_-1和vtx_n均为0;
16、计算从速度vx_i-1加速到vi过程中,按照加速度at进行匀加速所需运行的距离为δdt_i,加速期间的运行距离δdt_i如下:
17、;
18、若 δdt_i≤di,从第i-1段牵引最快限速vx_i-1加速至第i段限速vi,满足牵引的最小距离需求,第i段牵引最快限速vtx_i计算如下:
19、vtx_i= vi;
20、若 δdt_i>di,从第i-1段牵引最快限速vx_i-1加速至第i段限速vi,不满足牵引的最小距离需求,
21、计算从位置pi以牵引最快速度vtx_i-1牵引至位置pi+1,列车在pi+1处的速度vt_i;
22、;
23、第i段牵引最快限速vtx_i计算如下:
24、vtx_i= vt_i;
25、若第i-1段限速对应的牵引最快限速vtx_i-1大于等于第i段线路限速vi,其中vtx_-1和vtx_n均为0;
26、不存在牵引过程情况下,第i段牵引最快限速vtx_i与第i段线路限速vi保持一致,即:
27、vtx_i= vi。
28、进一步的,所述计算制动最快限速曲线,具体包括:
29、若第i+1限速段限速对应的制动最快限速vtx_i+1小于第i限速段线路限速vi,其中vbx_-1和vbx_n均为0;
30、计算从vi制动减速到达位置pi+1、速度vbx_i+1需要的制动距离δdb_i如下:
31、;其中ab为负值,ab表示匀减速过程的加速度;
32、若 δdb_i≤di,从第i段限速vi制动至第i+1段最快限速vx_i+1,满足制动的最小距离需求,第i段制动最快限速vbx_i计算如下:
33、vbx_i= vi;
34、若 δdt_i>di,从第i段限速vi制动至第i+1段最快限速vx_i+1,不满足制动的最小距离需求;
35、计算从位置pi制动至位置pi+1、制动最快限速vtx_i+1,列车在pi处的速度vb_i为:
36、;
37、第i段制动最快限速vbx_i计算如下:
38、vbx_i= vb_i;
39、若第i+1段限速对应的制动最快限速vtx_i+1大于等于第i段线路限速vi,其中vbx_-1和vbx_n均为0;
40、不存在制动过程情况下,第i段制动最快限速vbx_i与第i段线路限速vi保持一致,即:
41、vbx_i= vi。
42、进一步的,所述计算牵引制动融合限速曲线,具体包括:
43、结合已经计算的牵引最快限速曲线和制动最快限速曲线,将牵引制动最快限速曲线融合曲线描述为vtbx_0,vtbx_1, vtbx_2, ...,vtbx_n-1,vtbx_n,融合规则如下:
44、在位置pi对应的融合限速vtbx_i= min(vtx_i,vbx_i)。
45、进一步的,所述计算牵引制动延时约束下最快限速曲线,具体包括:
46、根据牵引制动融合限速曲线,该曲线已满足牵引制动的最大距离约束,牵引制动延时约束下最快限速曲线进一步结合限速变化,考虑如下:
47、若第i-1段牵引制动融合限速vtbx_i-1小于第i段牵引制动融合限速vtbx_i,其中vtbx_-1和vtbx_n均为0,第i+1段牵引制动融合限速vtbx_i+1小于第i段牵引制动融合限速vtbx_i:
48、计算从速度vtbx_i-1加速到vtbx_i过程中,按照加速度at进行匀加速所需运行的距离δdt_i,加速期间的运行距离δdt_i如下:
49、;
50、计算从vtbx_i制动减速到达速度vtbx_i+1需要的制动距离δdb_i如下:
51、;其中ab为负值,ab表示匀减速过程的加速度;
52、计算在速度vtbx_i处牵引转制动,列车的空走距离δdc_i如下:
53、;其中tdelay表示牵引转制动或制动转牵引的平均响应延时;
54、若 δdt_i+ δdc_i+ δdb_i≤di,从第i-1段牵引制动融合限速vtbx_i-1加速至第i段牵引制动融合限速vtbx_i,以及从第i段牵引制动融合限速vtbx_i制动至第i+1段牵引制动融合限速vtbx_i+1,满足牵引惰行制动的最小距离需求,则vx_i= vtbx_i;
55、若 δdt_i+ δdc_i+ δdb_i>di且δdt_i+ δdb_i≤di,从第i-1段牵引制动融合限速vtbx_i-1加速至第i段牵引制动融合限速vtbx_i,以及从第i段牵引制动融合限速vtbx_i制动至第i+1段牵引制动融合限速vtbx_i+1,不满足牵引惰行制动的最小距离需求,寻找限速vj∈[min(vtbx_i-1, vtbx_i+1), vtbx_i],使其满足如下公式:
56、;
57、假设满足条件的vj有k个,则第i段最高限速vx_i计算如下:
58、;
59、若δdt_i小于 di,δdb_i小于 di,若 δdt_i+ δdb_i>di,从第i-1段牵引制动融合限速vtbx_i-1加速至第i段牵引制动融合限速vtbx_i,以及从第i段牵引制动融合限速vtbx_i制动至第i+1段牵引制动融合限速vtbx_i+1,不满足牵引惰行制动的最小距离需求,寻找限速vj∈[min(vtbx_i-1, vtbx_i+1), vtbx_i],使其满足如下公式:
60、;
61、假设满足条件的vj有k个,则第i段最高限速vx_i计算如下:
62、;
63、若第i-1段牵引制动融合限速vtbx_i-1大于第i段牵引制动融合限速vtbx_i,其中vtbx_-1和vtbx_n均为0,第i+1段牵引制动融合限速vtbx_i+1大于第i段牵引制动融合限速vtbx_i,则第i限速段中;
64、若第i-1段牵引制动融合限速vtbx_i-1小于第i段牵引制动融合限速vtbx_i,其中vtbx_-1和vtbx_n均为0,第i段牵引制动融合限速vtbx_i小于第i+1段牵引制动融合限速vtbx_i+1;
65、采用的牵引制动融合限速曲线满足δdt_i≤ di,从第i-1段牵引制动融合限速vtbx_i-1加速至第i段限速vtbx_i满足制动最小距离需求:
66、vx_i= vtbx_i;
67、若第i-1段牵引制动融合限速vtbx_i-1大于第i段牵引制动融合限速vtbx_i,其中vtbx_-1和vtbx_n均为0,第i段牵引制动融合限速vtbx_i大于第i+1段牵引制动融合限速vtbx_i+1;
68、由于采用的牵引制动融合限速曲线满足δdb_i≤ di,从第i段牵引制动融合限速vtbx_i减速至第i+1段限速vtbx_i+1满足制动最小距离需求:
69、vx_i= vtbx_i。
70、进一步的,所述依据最快限速曲线计算最短运行时间ts,具体包括:
71、查找列车所处位置前方最快限速曲线段,统计满足若第i-1段最快限速vx_i-1小于第i段最快限速vx_i,其中vx_-1和vx_n均为0,第i+1段最快限速vx_i+1小于第i段最快限速vx_i情况的限速曲线段索引i以及个数m,运行时间ts1计算如下:
72、
73、查找列车所处位置前方最快限速曲线段,统计满足若第i-1段最快限速vx_i-1大于第i段第i段最快限速vx_i,其中vx_-1和vx_n均为0,第i+1段最快限速vx_i+1大于第i段最快限速vx_i情况的限速曲线段索引j以及个数n,运行时间ts2计算如下:
74、
75、查找列车所处位置前方最快限速曲线段,统计满足若第i-1段最快限速vx_i-1小于第i段最快限速vx_i,其中vx_-1和vx_n均为0,第i段最快限速vx_i小于第i+1段最快限速vx_i+1情况的限速曲线段索引k以及个数q,运行时间ts3计算如下:
76、;
77、查找列车所处位置前方最快限速曲线段,统计满足若第i-1段最快限速vx_i-1大于第i段最快限速vx_i,其中vx_-1和vx_n均为0,第i段最快限速vx_i大于第i+1段最快限速vx_i+1情况的限速曲线段索引h以及个数r,运行时间ts4计算如下:
78、;
79、则列车当前位置运行至线路终点最短运行时间ts= ts1+ ts2+ ts3+ ts4。
80、进一步的,所述依据列车运行最低限速计算最长运行时间tc,具体包括:
81、假设列车运行的最低限速vmin,列车距离线路终点的线路长度为,其中,i1为列车当前位置在最快限速曲线段的索引,pos为列车当前位置,则列车当前位置运行至线路终点最长运行时间计算如下:
82、若当前车速v>=vmin时:
83、;
84、若当前车速v小于vmin时:
85、。
86、进一步的,所述比较剩余运行时间t与最短运行时间ts、最长运行时间tc,制定时分约束下的推荐速度曲线规划,具体包括:
87、标记整个站间限速数据中限速变化的的起始位置,分别为p0、p1、p2、……pn-1、pn,站间线路限速为v0, v1, v2, ...,vn-1,vn,其中vn为线路终点限速0, 则最快限制速度曲线可以描述为{pi, di, vx_i},时分推荐速度曲线可以描述为{pi, di, vc_i};
88、若区间剩余运行时间t ≤ ts,此时列车按照最快限速运行至线路终点也大于区间剩余运行时间,列车只能按照最快运行速度运行,时分约束曲线与最快限速曲线一致,即
89、{pi, di, vc_i}={pi, di, vx_i},i = 1, 2, ……, n;
90、若区间剩余运行时间t ≥ tc,此时列车按照最低限速运行至线路终点也小于区间剩余运行时间,列车只能按照最低运行速度运行,时分约束曲线中限速为最低限速,即
91、{pi, di, vc_i}={pi, di, vmin},i = 1, 2, ……, n;
92、若区间剩余运行时间t>ts且t 小于 tc,
93、查找最快限速曲线中速度最大值,标记为vx_max,寻找vc_m∈[vmin, vx_max],则修改限速曲线为
94、;
95、若根据上述限速曲线带入最短运行时间公式计算的运行时间tc_m=t,则{pi, di,vc_i}即为时分约束下的限速曲线。
96、一种多站间运行的速度曲线制定系统,包括:区间剩余运行时间计算单元、限速段最快限速曲线计算单元和制定推荐速度曲线规划单元;
97、区间剩余运行时间计算单元,用于基于前车列车早点、准点或晚点,以及当前列车状态信息,计算区间剩余运行时间t;
98、限速段最快限速曲线计算单元,用于将列车运行整个线路限速分为n段限速段,并计算得到各限速段最快限速曲线;
99、制定推荐速度曲线规划单元,用于依据最快限速曲线计算最短运行时间ts,依据列车运行最低限速计算最长运行时间tc;比较剩余运行时间t与最短运行时间ts、最长运行时间tc,制定时分约束下的推荐速度曲线规划。
100、本发明至少具有以下有益效果:
101、本发明提出一种适用于自动驾驶的多站间运行时分参考速度曲线设计方法,有效提升列车在扰动下快速正常运行的能力,在保证合理站间运行时间的条件下,进一步降低跨多站间列车总延误时间;其中,提出的一种区间运行时间、区间剩余运行时间计算方法,综合考虑了列车运行多站间的早晚点情况,为后续列车参考速度的规划提供了依据,另外,在人工驾驶中也可提示司机;提出的一种牵引最快限速曲线、制动最快限速曲线以及牵引制动最快限速融合速度曲线计算方法,提供了列车在不超速情况下的最快运行曲线,为列车提供最快速运行策略;提出的一种牵引制动延时约束下最快限速曲线计算方法,进一步考虑列车牵引制动的切换时间因素,为列车提供了在牵引制动工况平稳切换的情况下的最快运行策略;提出的一种列车在限速曲线下运行的最短运行时间以及最长运行时间计算方法,可以作为列车参考速度规划的极限约束情况,另外最长和最短时间可反馈给调度,以便于调度及时更新不合理的运行时分,提高列车运行效率。
102、本发明提出一种适用于自动驾驶的多站间运行时分参考速度曲线设计方法,曲线的设计过程中考虑了多站间区间剩余运行规划时间、列车牵引制动切换延时等因素,实现了自动驾驶(ato)过程中自动根据区间运行时间调整区间运行速度,保证列车准点率,该方法适用于装配有ato系统或辅助驾驶系统的动车组及机车,保障了列车的运行效率。
103、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书以及附图中所指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!