用于大型复杂零件加工的六自由度并联式爬壁机器人
本发明涉及工业机器人加工领域,具体是涉及一种用于大型复杂零件加工的六自由度并联式爬壁机器人。
背景技术:
1、随着我国工业改革后,工业装备和技术在汽车、船舶、能源、航空、航天等领域迅速发展,对于大型复杂大型零件的加工要求逐渐提升,拥有复杂曲面造型、加工场景特征众多的大型复杂零件的各种关键基础构件加工难度也随之提高。
2、并联结构相较于传统的串联机构,拥有更大的刚度、更强的柔性、结构紧凑、承载能力大、定位精度高、姿态调节能力优越等优点,利于现阶段更加多元化的加工生产,但是常规并联装备仍存在框架封闭的缺点。
3、爬壁机器人作为特种机器人,如今在民用、军事等领域都有着广泛运用,有效地解决了人工作业高强度、效率低、存在一定危险等问题,对于克服加工场景与加工模式复杂的情况有着独特的优势,现有的大型复杂零件加工模式如基于大型龙门机床的包络式加工和基于移动加工机器人的原位加工,因加工装备的结构体极大、安装复位难以及加工精度较低,难以实现在复杂加工场景的高精度加工。
技术实现思路
1、本发明的目的是克服上述背景技术中的不足,提供一种用于大型复杂零件加工的六自由度并联式爬壁机器人,以解决实际加工场景复杂导致加工作业困难和加工精度不足等问题。
2、本发明的技术方案是:
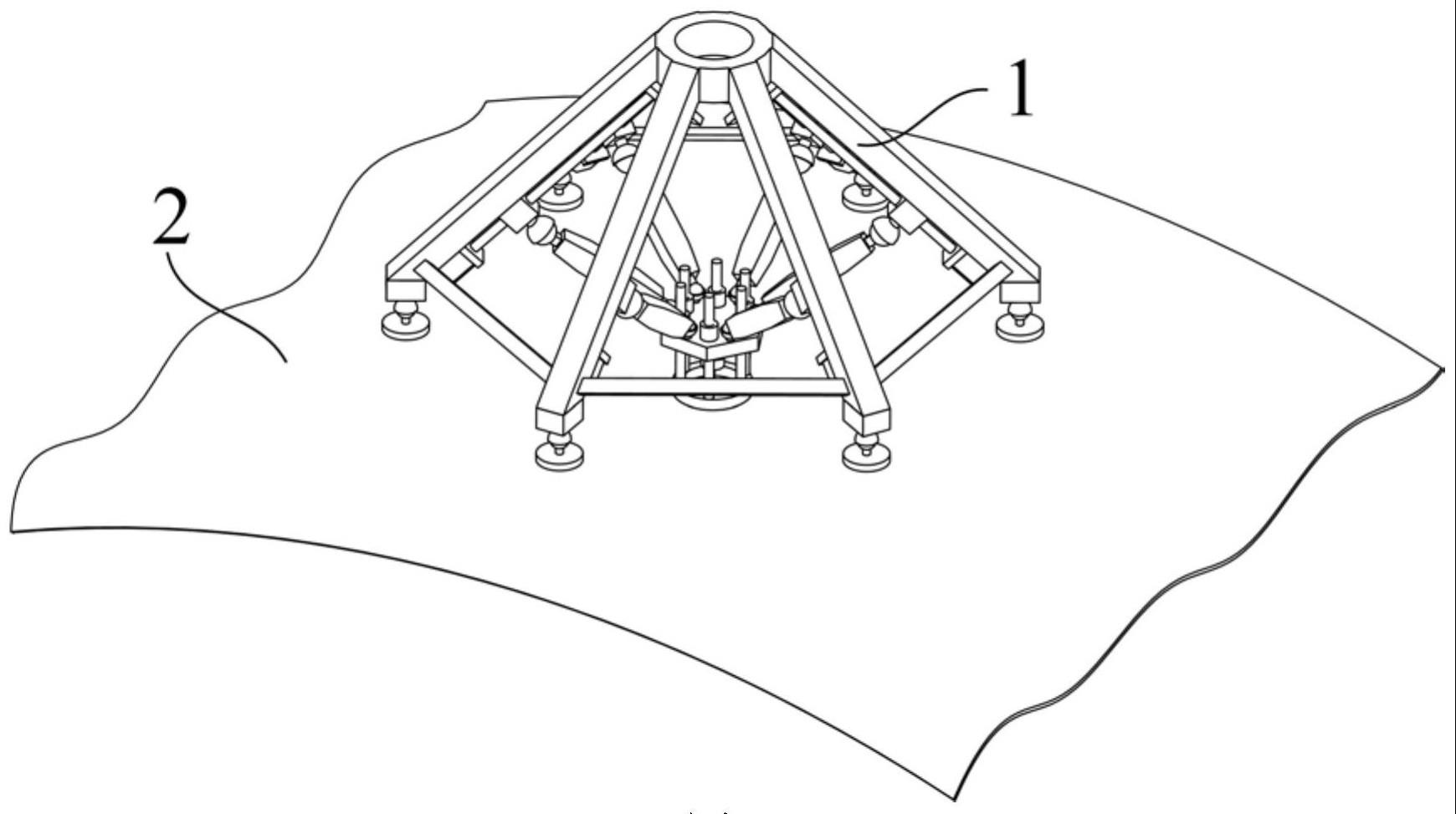
3、一种用于大型复杂零件加工的六自由度并联式爬壁机器人,包括定平台与动平台;其特征在于:所述定平台与动平台之间设有六自由度并联机构;所述六自由度并联机构包括并联连接的六条分支;所述分支包括依次连接在定平台与动平台之间的第一移动副、第一球铰、第一连杆和第二球铰;所述动平台包括设有主轴加工头与动平台负压吸附机构的动机架,可用于大型复杂零件的加工;所述定平台包括设有定平台负压吸附机构的定机架,在移动和加工时可针对大型复杂零件的表面形状进行适应性的吸附。
4、所述动平台负压吸附机构包括通过第二移动副连接动机架的第一负压吸盘;所述定平台负压吸附机构包括与定机架连接的支座以及通过第三球铰连接支座的第二负压吸盘。
5、所述第一移动副包括与定机架连接的第一移动副导轨以及与第一球铰连接且与第一移动副导轨滑动配合的第一移动副滑块;所述第二移动副包括与第一负压吸盘连接的第二移动副导轨以及与动机架连接且与第二移动副导轨滑动配合的第二移动副滑块。
6、所述第二移动副导轨轴线互相平行。
7、所述第一移动副、第二移动副均为驱动副。
8、所述第一移动副、第二移动副均为电机带动的滚珠丝杠机构。
9、所述定平台负压吸附机构设置在定机架底部;所述定机架上设有六个定平台负压吸附机构。
10、所述第一移动副导轨呈放射状布置。
11、所述第一移动副导轨的一端靠近定机架的中心,第一移动副导轨的另一端靠近定平台负压吸附机构。
12、所述第一移动副的电机安装在靠近定机架的底部位置,第二移动副的电机安装在靠近动机架的位置。
13、本发明的有益效果是:
14、本发明的整体结构具有透明化、紧凑便捷、低成本、稳定性高的特点,与现有的并联机构相比,具备更佳的发展前景;本发明在加工场景中可实现大范围空间定位移动以及小范围高精度加工,与现有的并联机构相比,具有负载能力强、刚度高、自适应能力强等优势;本发明具有驱动器少、杆件数量少、加工精度高等优点,与现有的并联机构相比,是更为行之有效的大型复杂零件加工的方式。
技术特征:
1.一种用于大型复杂零件加工的六自由度并联式爬壁机器人,包括定平台与动平台;其特征在于:所述定平台与动平台之间设有六自由度并联机构(16);所述六自由度并联机构包括并联连接的六条分支;所述分支包括依次连接在定平台与动平台之间的第一移动副、第一球铰(133)、第一连杆(134)和第二球铰(135);所述动平台包括设有主轴加工头(15)与动平台负压吸附机构(14)的动机架(13),可用于大型复杂零件(2)的加工;所述定平台包括设有定平台负压吸附机构(12)的定机架(11),在移动和加工时可针对大型复杂零件的表面形状进行适应性的吸附。
2.根据权利要求1所述的用于大型复杂零件加工的六自由度并联式爬壁机器人,其特征在于:所述动平台负压吸附机构(14)包括通过第二移动副连接动机架(13)的第一负压吸盘(141);所述定平台负压吸附机构(12)包括与定机架连接的支座(121)以及通过第三球铰(123)连接支座的第二负压吸盘(122)。
3.根据权利要求2所述的用于大型复杂零件加工的六自由度并联式爬壁机器人,其特征在于:所述第一移动副包括与定机架(11)连接的第一移动副导轨(131)以及与第一球铰(133)连接且与第一移动副导轨(131)滑动配合的第一移动副滑块(132);所述第二移动副包括与第一负压吸盘(141)连接的第二移动副导轨(142)以及与动机架(13)连接且与第二移动副导轨(142)滑动配合的第二移动副滑块(143)。
4.根据权利要求3所述的用于大型复杂零件加工的六自由度并联式爬壁机器人,其特征在于:所述第二移动副导轨(142)轴线互相平行。
5.根据权利要求4所述的用于大型复杂零件加工的六自由度并联式爬壁机器人,其特征在于:所述第一移动副、第二移动副均为驱动副。
6.根据权利要求5所述的用于大型复杂零件加工的六自由度并联式爬壁机器人,其特征在于:所述第一移动副、第二移动副均为电机带动的滚珠丝杠机构。
7.根据权利要求6所述的用于大型复杂零件加工的六自由度并联式爬壁机器人,其特征在于:所述定平台负压吸附机构(12)设置在定机架(11)底部;所述定机架(11)上设有六个定平台负压吸附机构(12)。
8.根据权利要求7所述的用于大型复杂零件加工的六自由度并联式爬壁机器人,其特征在于:所述第一移动副导轨(131)呈放射状布置。
9.根据权利要求8所述的用于大型复杂零件加工的六自由度并联式爬壁机器人,其特征在于:所述第一移动副导轨(131)的一端靠近定机架(11)的中心,第一移动副导轨(131)的另一端靠近定平台负压吸附机构(12)。
10.根据权利要求9所述的用于大型复杂零件加工的六自由度并联式爬壁机器人,其特征在于:所述第一移动副的电机安装在靠近定机架(11)的底部位置,第二移动副的电机安装在靠近动机架(13)的位置。
技术总结
本发明涉及工业机器人加工领域,目的是提供一种用于大型复杂零件加工的六自由度并联式爬壁机器人,以解决实际加工场景复杂导致加工作业困难和加工精度不足等问题。技术方案是一种用于大型复杂零件加工的六自由度并联式爬壁机器人;其特征在于:所述定平台与动平台之间设有六自由度并联机构;所述六自由度并联机构包括并联连接的六条分支;所述分支包括依次连接在定平台与动平台之间的第一移动副、第一球铰、第一连杆和第二球铰;所述动平台包括设有主轴加工头与动平台负压吸附机构的动机架,可用于大型复杂零件的加工;所述定平台包括设有定平台负压吸附机构的定机架,在移动和加工时可针对大型复杂零件的表面形状进行适应性的吸附。
技术研发人员:柴馨雪,郑国畅,徐灵敏,李秦川
受保护的技术使用者:浙江理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!