一种水下机器人用弱化水力减少摩擦装置的制作方法
一种水下机器人用弱化水力减少摩擦装置
[0001]
原案申请号:2018109267054原案申请日:2018年8月15日原案申请人:东莞市奇趣机器人科技有限公司。
技术领域
[0002]
本发明涉及水下机器人辅助工作装置技术领域,具体为一种水下机器人用弱化水力减少摩擦装置。
背景技术:
[0003]
水下机器人是一种代替人进行水下工作的极限机器人,无人有缆潜水器的研制80年代进入了较快的发展时期,到1981年,无人遥控潜水器发展到了400余艘,其中90%以上是直接或间接为海洋石油开采业服务的,海洋石油和天然气开发的需要,推动了潜水器理论和应用的研究,潜水器的数量和种类都有显著地增长,潜水器是水下机器人的前身,近现代在机器人领域,水下机器人的开发、更新及应用呈迅猛态势发展,水下机器人在海洋调查、海洋石油开发、救捞等方面发挥了较大的作用。
[0004]
现代的水下机器人主要的防护结构还是不够全面,有待补充,其中对于水力摩擦作用的防护结构尚存在需要改进或可以进行改进的地方,水下机器人的下潜深度随着水压影响,自身内部的感应器等测量元件或设备在水下工作中会面临巨大威胁,若不对水体作用力进行弱化处理,很可能会因此而减少机器人的使用寿命、工作性能以及对周围环境的灵敏感知能力,同时水下机器人在水下运动时,由于水底地表环境的不确定性、淤泥松软不足以提供稳定的支撑作用,会导致水下机器人在行动时不够稳定敏捷。
技术实现要素:
[0005]
本发明的目的在于提供一种水下机器人用弱化水力减少摩擦装置,以解决上述背景技术中提出的水下机器人的下潜深度随着水压影响,自身内部的感应器等测量元件或设备在水下工作中会面临巨大威胁,若不对水体作用力进行弱化处理,很可能会因此而减少机器人的使用寿命、工作性能以及对周围环境的灵敏感知能力,同时水下机器人在水下运动时,由于水底地表环境的不确定性、淤泥松软不足以提供稳定的支撑作用,会导致水下机器人在行动时不够稳定敏捷的问题。
[0006]
为实现上述目的,本发明提供如下技术方案:一种水下机器人用弱化水力减少摩擦装置,包括水平基板和底平衡板,所述水平基板的上方安装有防护圈壁,且防护圈壁的外壁固定有架杆,所述防护圈壁的内部左右两侧均设置有支杆,且支杆的上方固定有架板,所述底平衡板的左右两侧均安装有连杆,且底平衡板位于水平基板的下方。
[0007]
优选的,所述防护圈壁的内侧安装有塑胶垫层,且塑胶垫层的内侧设置有过渡垫层,所述过渡垫层的外壁固定有嵌块,且嵌块的外壁镶嵌有滚动胶珠,所述过渡垫层的内侧固定有隔网,且隔网的内部安装有撑架。
[0008]
优选的,所述撑架为圆弧杆状结构,且撑架每两个交叉设置为一组,并且撑架关于隔网的竖直中心线呈环状均匀设置有4组。
[0009]
优选的,所述架杆从连接轴的内部贯穿,且连接轴的外壁分别固定有水作用平板和水作用圆弧板,所述水作用平板和水作用圆弧板分别设置有3个,且3个水作用平板和3个水作用圆弧板之间关于连接轴的中轴线对称,所述防护圈壁的外壁均匀设置有架杆,且架杆之间高度平齐。
[0010]
优选的,所述水作用平板的表面嵌套安装有分水板,且分水板为圆弧板状结构,所述水作用圆弧板的表面贯穿有通水孔,且通水孔在水作用圆弧板的表面均匀设置。
[0011]
优选的,所述支杆之间安装有压力撑杆,且压力撑杆的下方设置有椭圆分压环,所述椭圆分压环的内侧壁焊接有固定杆,且固定杆的中间固定有回弹椭圆体,所述回弹椭圆体的内部安装有支撑弹簧,所述架板的上方设置有活动板,且活动板的上方左右两侧均安装有弹块。
[0012]
优选的,所述压力撑杆沿架板的水平方向共等距设置有个,且椭圆分压环沿压力撑杆的竖直方向呈交缠状均匀设置,所述椭圆分压环的水平中心线与回弹椭圆体的水平中心线重合,且回弹椭圆体的内部共竖直平行设置有4个支撑弹簧。
[0013]
优选的,所述底平衡板的下方左右两侧均安装有滚轴,且滚轴的下方设置有履带,所述底平衡板的中间固定有支撑架,且支撑架的上下两侧均设置有支持网筒,所述支持网筒的外壁呈环状均匀设置有旋水叶,且旋水叶的外侧安装有外护网。
[0014]
优选的,所述履带的下方焊接有固定板,且固定板的下方安装有稳定轮,所述稳定轮的内侧呈环状均匀设置有抗压塑胶块,且稳定轮的外壁分别均匀固定有倒钩和压水抄板,所述倒钩和压水抄板为交替设置。
[0015]
优选的,所述底平衡板的左右两侧均固定有安装块,且安装块的下方设置有连接块,所述连接块的下方安装有行动架,且行动架的内部贯穿有固定螺栓,所述行动架的下方安装有底板,且底板的下方沿底板的水平方向均匀分布有插齿板,所述行动架通过连接块与安装块构成转动结构,且行动架与底板之间尺寸相吻合。
[0016]
与现有技术相比,本发明的有益效果如下:1、本发明通过防护圈壁内部的塑胶垫层、过渡垫层和隔网的设置,保证了防护圈壁整体结构的多层性及具有较好的防护性,防护圈壁自身外壁为钢板材质,塑胶垫层为塑胶弹性材质,过渡垫层为硬质棉减震材质,隔网为钢条网状结构,各自对防护圈壁的整体结构起到不同的支撑作用,并相互承接,达到对防护圈壁整体结构强度进行加强的目的,在水力作用下,能够依靠一定程度上的形变抵抗水力作用,继而保证整个装置的结构强度,过渡垫层上的嵌块及嵌块上的滚动胶珠对过渡垫层与塑胶垫层之间的接触面提供较好的过渡、承载以及支撑作用,撑架利用自身的圆弧杆状结构,具有较好的结构支撑强度和回弹能力,有助于保证防护圈壁不会在水力作用下受到较大的形变损伤。
[0017]
2、本发明通过架杆的均匀设置,有助于防护圈壁对水力作用进行弱化,各个架杆均贯穿配合在连接轴中,连接轴上又分别安装有水作用平板和水作用圆弧板,当水流经过装置时,水作用平板和水作用圆弧板受水力作用,结合架杆与连接轴的配合连接,开始随水力作用方向旋转,水流通过水作用圆弧板上均匀开设的通水孔得到疏散,从而达到弱化水力效果的目的,水作用平板上配合安装有分水板,随着水力作用,分水板与水作用平板之间
自动自发地形成一定的夹角,用以排分水流,弱化水压作用,分水板的圆弧板状结构能够与水体之间较好地融合,自身所受到的水体摩擦较小,水作用平板和水作用圆弧板的动作动力来源于水,同时结合自身结构的特殊性,对水力进行弱化处理。
[0018]
3、本发明通过压力撑杆和椭圆分压环的设置,在防护圈壁中起到较好的调控水压作用的效果,椭圆分压环为刚性金属椭圆环状结构,相互之间交缠设置,在椭圆分压环的内部还相应地增加了回弹椭圆体来增强单个椭圆分压环的结构强度,回弹椭圆体为不锈钢椭圆内空结构,具有一定的结构强度,为了使回弹椭圆体具有较好的结构支撑弹性,在回弹椭圆体的内部设置了支撑弹簧,随着装置入水深度的增强,在装置的上方会受到来自于较深水体的压力作用,水下机器人安装在装置中,装置所受到的压力更大,压力作用到架板上后,椭圆分压环相互叠压,借助回弹椭圆体的支持配合作用,抵抗水压,保证整个装置的结构稳定性。
[0019]
4、本发明通过支持网筒在支撑架上的设置,使装置底部接触到水底表面时,装置周围水力影响能够得到有效削弱,支持网筒为网状筒形结构,具有良好的透水性和结构强度,支持网筒以嵌套配合的安装方式安装在支撑架上,在水流作用下,旋水叶随水力作用动作,在外护网的内部开始进行旋转,旋水叶为圆弧板状结构,同时在支持网筒的外壁均匀设置,与水的接触面积较大,随着支持网筒的自发转动,对装置下方的水力作用进行弱化,保证装置能够平稳移动。
[0020]
5、本发明通过固定板及其下方设置的稳定轮,保证了整个装置的行动能力,利用稳定轮外壁均匀设置的倒钩和压水抄板对装置在行动过程中可能遇到的来自于水底淤泥的行动阻碍作用进行弱化,倒钩为尖端带有倒刺的钩状结构,对于水底淤泥具有一定的抓取作用,利用对淤泥的携带能力,将整个装置在行动中可能受到的不稳定支撑因素进行排除,压水抄板能够对水流进行扰动,在装置行动过程中,对水流进行回环推动,以消抵水力作用,并相应地使装置在运动过程中得到来自于水力的辅助推动作用,行动架本身结构可以进行调节,利用连接块的连接作用,行动架的自身角度可以拉开,利用行动架与底板之间的配合作用,改变底板相对行动架的位置,均匀设置的插齿板所起到的作用与倒钩类似,插齿板能够插入到水底淤泥中,主要起平衡装置的作用。
附图说明
[0021]
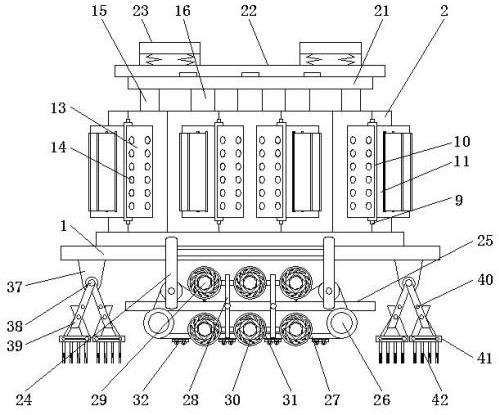
图1为本发明结构示意图;图2为本发明防护圈壁结构示意图;图3为本发明水作用平板和水作用圆弧板结构示意图;图4为本发明压力撑杆结构示意图;图5为本发明支持网筒结构示意图;图6为本发明稳定轮结构示意图。
[0022]
图中:1、水平基板,2、防护圈壁,3、塑胶垫层,4、过渡垫层,5、嵌块,6、滚动胶珠,7、隔网,8、撑架,9、架杆,10、连接轴,11、水作用平板,12、分水板,13、水作用圆弧板,14、通水孔,15、支杆,16、压力撑杆,17、椭圆分压环,18、固定杆,19、回弹椭圆体,20、支撑弹簧,21、架板,22、活动板,23、弹块,24、连杆,25、底平衡板,26、滚轴,27、履带,28、支撑架,29、支持网筒,30、旋水叶,31、外护网,32、固定板,33、稳定轮,34、抗压塑胶块,35、倒钩,36、压水抄
板,37、安装块,38、连接块,39、行动架,40、固定螺栓,41、底板,42、插齿板。
具体实施方式
[0023]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0024]
请参阅图1-6,本发明提供一种技术方案:一种水下机器人用弱化水力减少摩擦装置,包括水平基板1和底平衡板25,水平基板1的上方安装有防护圈壁2,且防护圈壁2的外壁固定有架杆9,防护圈壁2的内侧安装有塑胶垫层3,且塑胶垫层3的内侧设置有过渡垫层4,过渡垫层4的外壁固定有嵌块5,且嵌块5的外壁镶嵌有滚动胶珠6,过渡垫层4的内侧固定有隔网7,且隔网7的内部安装有撑架8,通过防护圈壁2内部的塑胶垫层3、过渡垫层4和隔网7的设置,保证了防护圈壁2整体结构的多层性及具有较好的防护性,防护圈壁2自身外壁为钢板材质,塑胶垫层3为塑胶弹性材质,过渡垫层4为硬质棉减震材质,隔网7为钢条网状结构,各自对防护圈壁2的整体结构起到不同的支撑作用,并相互承接,达到对防护圈壁2整体结构强度进行加强的目的,在水力作用下,能够依靠一定程度上的形变抵抗水力作用,继而保证整个装置的结构强度,过渡垫层4上的嵌块5及嵌块5上的滚动胶珠6对过渡垫层4与塑胶垫层3之间的接触面提供较好的过渡、承载以及支撑作用,撑架8为圆弧杆状结构,且撑架8每两个交叉设置为一组,并且撑架8关于隔网7的竖直中心线呈环状均匀设置有4组,撑架8利用自身的圆弧杆状结构,具有较好的结构支撑强度和回弹能力,有助于保证防护圈壁2不会在水力作用下受到较大的形变损伤,架杆9从连接轴10的内部贯穿,且连接轴10的外壁分别固定有水作用平板11和水作用圆弧板12,水作用平板11和水作用圆弧板12分别设置有3个,且3个水作用平板11和3个水作用圆弧板12之间关于连接轴10的中轴线对称,防护圈壁2的外壁均匀设置有架杆9,且架杆9之间高度平齐,通过架杆9的均匀设置,有助于防护圈壁2对水力作用进行弱化,各个架杆9均贯穿配合在连接轴10中,连接轴10上又分别安装有水作用平板11和水作用圆弧板13,当水流经过装置时,水作用平板11和水作用圆弧板13受水力作用,结合架杆9与连接轴10的配合连接,开始随水力作用方向旋转,水作用平板11的表面嵌套安装有分水板12,且分水板12为圆弧板状结构,水作用圆弧板13的表面贯穿有通水孔14,且通水孔14在水作用圆弧板13的表面均匀设置,水流通过水作用圆弧板13上均匀开设的通水孔14得到疏散,从而达到弱化水力效果的目的,水作用平板11上配合安装有分水板12,随着水力作用,分水板12与水作用平板11之间自动自发地形成一定的夹角,用以排分水流,弱化水压作用,分水板12的圆弧板状结构能够与水体之间较好地融合,自身所受到的水体摩擦较小,水作用平板11和水作用圆弧板13的动作动力来源于水,同时结合自身结构的特殊性,对水力进行弱化处理,防护圈壁2的内部左右两侧均设置有支杆15,且支杆15的上方固定有架板21,支杆15之间安装有压力撑杆16,且压力撑杆16的下方设置有椭圆分压环17,椭圆分压环17的内侧壁焊接有固定杆18,且固定杆18的中间固定有回弹椭圆体19,回弹椭圆体19的内部安装有支撑弹簧20,架板21的上方设置有活动板22,且活动板22的上方左右两侧均安装有弹块23,通过压力撑杆16和椭圆分压环17的设置,在防护圈壁2中起到较好的调控水压作用的效果,椭圆分压环17为刚性金属椭圆环状结构,相互之间交缠设置,在椭
圆分压环17的内部还相应地增加了回弹椭圆体19来增强单个椭圆分压环17的结构强度,回弹椭圆体19为不锈钢椭圆内空结构,具有一定的结构强度,为了使回弹椭圆体19具有较好的结构支撑弹性,在回弹椭圆体19的内部设置了支撑弹簧20,压力撑杆16沿架板21的水平方向共等距设置有3个,且椭圆分压环17沿压力撑杆16的竖直方向呈交缠状均匀设置,椭圆分压环17的水平中心线与回弹椭圆体19的水平中心线重合,且回弹椭圆体19的内部共竖直平行设置有4个支撑弹簧20,随着装置入水深度的增强,在装置的上方会受到来自于较深水体的压力作用,水下机器人安装在装置中,装置所受到的压力更大,压力作用到架板21上后,椭圆分压环17相互叠压,借助回弹椭圆体19的支持配合作用,抵抗水压,保证整个装置的结构稳定性,底平衡板25的左右两侧均安装有连杆24,且底平衡板25位于水平基板1的下方,底平衡板25的下方左右两侧均安装有滚轴26,且滚轴26的下方设置有履带27,底平衡板25的中间固定有支撑架28,且支撑架28的上下两侧均设置有支持网筒29,支持网筒29的外壁呈环状均匀设置有旋水叶30,且旋水叶30的外侧安装有外护网31,通过支持网筒29在支撑架28上的设置,使装置底部接触到水底表面时,装置周围水力影响能够得到有效削弱,支持网筒29为网状筒形结构,具有良好的透水性和结构强度,支持网筒29以嵌套配合的安装方式安装在支撑架28上,在水流作用下,旋水叶30随水力作用动作,在外护网31的内部开始进行旋转,旋水叶30为圆弧板状结构,同时在支持网筒29的外壁均匀设置,与水的接触面积较大,随着支持网筒29的自发转动,对装置下方的水力作用进行弱化,保证装置能够平稳移动,履带27的下方焊接有固定板32,且固定板32的下方安装有稳定轮33,稳定轮33的内侧呈环状均匀设置有抗压塑胶块34,且稳定轮33的外壁分别均匀固定有倒钩35和压水抄板36,倒钩35和压水抄板36为交替设置,通过固定板32及其下方设置的稳定轮33,保证了整个装置的行动能力,利用稳定轮33外壁均匀设置的倒钩35和压水抄板36对装置在行动过程中可能遇到的来自于水底淤泥的行动阻碍作用进行弱化,倒钩35为尖端带有倒刺的钩状结构,对于水底淤泥具有一定的抓取作用,利用对淤泥的携带能力,将整个装置在行动中可能受到的不稳定支撑因素进行排除,压水抄板36能够对水流进行扰动,在装置行动过程中,对水流进行回环推动,以消抵水力作用,并相应地使装置在运动过程中得到来自于水力的辅助推动作用,底平衡板25的左右两侧均固定有安装块37,且安装块37的下方设置有连接块38,连接块38的下方安装有行动架39,且行动架39的内部贯穿有固定螺栓40,行动架39的下方安装有底板41,且底板41的下方沿底板41的水平方向均匀分布有插齿板42,行动架39通过连接块38与安装块37构成转动结构,且行动架39与底板41之间尺寸相吻合,行动架39本身结构可以进行调节,利用连接块38的连接作用,行动架39的自身角度可以拉开,利用行动架39与底板41之间的配合作用,改变底板41相对行动架39的位置,均匀设置的插齿板42所起到的作用与倒钩35类似,插齿板42能够插入到水底淤泥中,主要起平衡装置的作用。
[0025]
工作原理:本装置作为水下机器人的装载式辅助装置,首先需要将水下机器人安装到装置中,利用活动板22与架板21之间的配合关系,可以对活动板22在架板21上的位置进行调整,方便安装,弹块23贴合在机器人的外壁面,对机器人起到减震保护的作用,防护圈壁2、塑胶垫层3、过渡垫层4和隔网7层层分布,紧密贴合,对装置起到加固作用,同时结合钢板材质的防护圈壁2、塑胶弹性材质的塑胶垫层3、硬质棉减震材质的过渡垫层4以及呈钢条网状结构的隔网7,使整个装置能够抵抗水力作用,借助自身的弹性变形,削弱水力对装置的挤压作用,从而对装置中放置的机器人提供较好的直接防护结构,随着装置下潜深度
的不断累加,同时在机器人的重力作用下,装置所受到的水力压力相应较大,此时水压作用到活动板22上,压力撑杆16受到压力作用,结合椭圆分压环17的分压作用、回弹椭圆体19及其内部支撑弹簧20的反弹作用,削弱水压作用,椭圆分压环17为刚性金属椭圆环状结构,相互之间交缠设置,回弹椭圆体19为不锈钢椭圆内空结构,具有一定的结构强度,同时在支撑弹簧20的作用下,回弹椭圆体19具有较好的结构支撑弹性,当活动板22受到水压作用时,椭圆分压环17相互叠压,借助回弹椭圆体19的支持配合作用,抵抗水压,从而保证了整个装置的结构稳定性,在水下环境中,装置还会受到水力摩擦作用,水力摩擦作用除了会造成装置发生形变外,还会相应地减弱装置的行动能力,在防护圈壁2的外侧、支撑架28上分别设置了削弱水力作用的装置,在架杆9与连接轴10的配合连接作用下,当水流接触水作用平板11和水作用圆弧板13时,会受到不同程度的弱化处理,水流经过水作用圆弧板13上均匀设置的通水孔14分散,达到弱化水力冲压的目的,水流经过水作用平板11上嵌套配合的分水板12时,在水作用平板11与分水板12的配合作用下,对分水板12进行冲压作用,改变分水板12在水作用平板11上的安装角度,相应地分散了水流的作用方向,以对水力作用进行弱化,支持网筒29以嵌套配合的安装方式安装在支撑架28上,在水流作用下,旋水叶30随水力作用动作,在外护网31的内部开始进行旋转,以抵消水力作用,尽可能地保证装置平衡,利用连接块38的连接作用,对行动架39在安装块37上的安装角度进行调节,结合具体实际,将行动架39拉开一定角度,利用行动架39与底板41之间的配合连接,对底板41在行动架39上的位置进行调节,插齿板42深入到水地淤泥中,起到固定装置的作用,同时在各稳定轮33上设置有倒钩35和压水抄板36,倒钩35为尖端带有倒刺的钩状结构,对于水地淤泥具有一定的抓取作用,以使装置在水地淤泥上方得到较好的支撑作用,压水抄板36能够对水流进行扰动,在装置行动过程中,对水流进行回环推动,以消抵水力作用,并相应地使装置在运动过程中得到来自于水力的辅助推动作用,就这样完成整个装置的使用过程。
[0026]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1