集成出食物设备的制作方法
1.本发明涉及厨房设备,尤其是集成出食物设备。
背景技术:
2.专利文献cn201727345u公开了食料自动定量添加机构,主要地,包括筒状料仓,筒状料仓侧壁开有出料口;为筒状料仓配有电机,电机的输出轴固定地轴接筒状料仓,电机驱动筒状料仓轴转使得筒状料仓的出料口朝下进行出料。由于电机固接筒状料仓,故不便于拆出筒状料仓进行清洗。
技术实现要素:
3.本发明给出集成出食物设备,方便拆出筒状料仓进行清洗。
4.集成出食物设备,包括卧置的筒状料仓,筒状料仓的侧壁开设有出料口,筒状料仓轴转直至出料口朝下进行出料,包括拨筒轮,拨筒轮拨动筒状料仓的外侧壁从而带动筒状料仓进行所述轴转。
5.进一步地,所述筒状料仓有至少两个,这些筒状料仓轴向排列;为拨筒轮配有轴向驱动机构,拨筒轮受轴向驱动机构的驱动轴向移位对准任一个筒状料仓。
6.进一步地,为拨筒轮配有径向驱动机构,径向驱动机构受轴向驱动机构的驱动,与拨筒轮共同进行所述轴向移位,拨筒轮受径向驱动机构的驱动径向靠近该筒状料仓的外侧壁。
7.进一步地,所述轴向驱动机构具体为丝杆螺母驱动机构。
8.进一步地,所述径向驱动机构具体为丝杆螺母驱动机构。
9.进一步地,包括驱使拨筒轮轴转拨动筒状料仓外侧壁的驱轮电机。
10.进一步地,在筒状料仓的侧方设有侧挡料板,筒状料仓的出料口在朝向侧挡料板的状态下被侧挡料板挡住,出料口朝下则不被侧挡料板挡住。
11.进一步地,为拨筒轮配有径向驱动机构,径向驱动机构受轴向驱动机构的驱动,与拨筒轮共同进行所述轴向移位,拨筒轮受径向驱动机构的驱动径向靠近该筒状料仓的外侧壁;筒状料仓侧壁留有受拨动部,侧挡料板开设有对准受拨动部的进轮口,拨筒轮受径向驱动机构的驱动径向穿过进轮口拨动筒状料仓外侧壁的受拨动部以带动筒状料仓进行所述轴转。
12.进一步地,包括位于筒状料仓下方的接料容器,接料容器对准朝下的出料口承接食物。
13.有益效果在于:拨筒轮外侧壁摩擦筒状料仓的外侧壁,拨筒轮与筒状料仓只需相互接触而无需固接,故筒状料仓能够拆出进行清洗。
附图说明
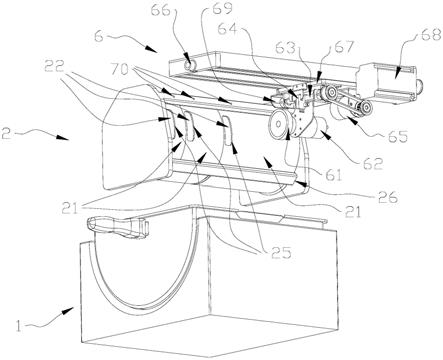
14.图1是出食物装置的立体视图;
15.图2是驱筒机构处于未对准筒状料仓的受拨动部的状态的正面视图;
16.图3是驱筒机构处于未对准筒状料仓的受拨动部的状态的右侧视图;
17.图4是驱筒机构处于对准筒状料仓的受拨动部的状态的正面视图;
18.图5是驱筒机构处于对准筒状料仓的受拨动部的状态的左侧视图;
19.图6是驱筒机构的拨筒轮移到筒状料仓的受拨动部上的左侧视图;
20.图7是装食物机构的后俯视角的爆炸示意图;
21.图8是单个筒状料仓正面视角的立体示意图;
22.图9是装食物机构中的单个筒状料仓处于出料口朝上的状态时的正面视角立体示意图;
23.图10是单个筒状料仓处于出料状态时与侧挡料板配合的后视角立体视图;
24.图11是单个筒状料仓处于出料状态时与侧挡料板配合的正面视图;
25.图中:1、接料容器;2、装食物机构;6、驱筒机构;21、侧挡料板;22、受拨动部;23、筒状料仓;24、筒第二受感磁块;25、进轮口;26、筒架;27、筒第一受感磁块;61、拨筒轮;62、驱轮电机;63、左右横向丝杆;64、左右横移丝母块;65、前后横移电机;66、前后横向丝杆;67、前后横移丝母块;68、固定电机;69、霍尔传感器组;70、固定受感磁块。
具体实施方式
26.如图1所示,出食物装置包括前后横向的装食物机构2、驱筒机构6、接料容器1、控制器,出食物装置的工作过程由控制器控制。装食物机构2如图7和图9所示,包括筒架26,筒架26上排列有三个卧置的筒状料仓23,三个筒状料仓23轴向排列。每个筒状料仓23的侧壁开有出料口且每个筒状料仓23右端部(此处按图7方向)的整圈侧沿为受拨动部22。这三个筒状料仓23的侧方分别设有三个侧挡料板21,每个侧挡料板21上都开设有进轮口25,进轮口25对准相应筒状料仓23的受拨动部22。如图1所示,驱筒机构6包括拨筒轮61,驱筒机构6驱使拨筒轮61径向穿过其中一个进轮口25,则拨筒轮61可拨动相应的筒状料仓23轴转。筒状料仓23轴转至出料口朝向侧挡料板21的状态下,出料口被侧挡料板21挡住以免漏料;筒状料仓23继续轴转至出料口侧朝下(如图10),则出料口不被侧挡料板21挡住,筒状料仓23出料到接料容器1,具体详述如下。
27.驱筒机构6具体包括上丝杆螺母机构、下丝杆螺母机构、拨筒轮61和驱动拨筒轮61轴转的驱轮电机62。作为轴向驱动机构的上丝杆螺母机构包括固定电机68、由固定电机68驱动轴转的前后横向丝杆66、装在前后横向丝杆66上的前后横移丝母块67。作为径向驱动机构的下丝杆螺母机构装在前后横移丝母块67上,被前后横移丝母块67带动进行轴向前后横移。下丝杆螺母机构具体包括前后横移电机65、由前后横移电机65驱动轴转的左右横向丝杆63、装在左右横向丝杆63上的左右横移丝母块64。拨筒轮61和驱轮电机62装在左右横向丝杆63的左右横移丝母块64上,被左右横移丝母块64带动进行径向左右横移。
28.出食物装置的初始状态如图2和图3所示,拨筒轮61尚未对准任一个进轮口25且尚未接触装食物机构2。装食物机构2的筒架26上沿前后向直线排列有三个作为第三受感件的固定受感磁块70,三个固定受感磁块70分别与三个进轮口25位置对应,而前后横移丝母块67上装有朝向这三个固定受感磁块70所在直线的霍尔传感器组69。出食物装置开始工作,如图4和图5所示,固定电机68驱动前后横向丝杆66轴转,使得前后横移丝母块67带动下丝
杆螺母机构、拨筒轮61和驱轮电机62轴向前移直至作为感应件的霍尔传感器组69感应到第一个固定受感磁块70,此时拨筒轮61对准第一个侧挡料板21的进轮口25且霍尔传感器组69对准第一个筒状料仓23,但仍未接触筒状料仓23的受拨动部22。下一步如图6所示,前后横移电机65驱动左右横向丝杆63轴转,使得左右横移丝母块64带动拨筒轮61和驱轮电机62径向左移直至拨筒轮61径向穿过第一个侧挡料板21的进轮口25,此时拨筒轮61接触第一个筒状料仓23的受拨动部22。如图8所示,筒状料仓23的受拨动部22设有环周排列的筒第一受感磁块27和筒第二受感磁块24,筒第一受感磁块27作为第一受感件,筒第二受感磁块24作为第二受感件。在拨筒轮61已接触但尚未拨动筒状料仓23的受拨动部22时,霍尔传感器组69对准进轮口25。如图10和图11所示,驱轮电机62正转驱使拨筒轮61正向轴转,则拨筒轮61正向拨动第一个筒状料仓23直至筒第一受感磁块27对准进轮口25后,筒第一受感磁块27被前后横移丝母块67上的霍尔传感器组69所感应到,此状态下筒状料仓23的出料口侧朝下,控制器令驱轮电机62停机使得筒状料仓23保持其出料口侧朝下的状态从而出料到接料容器1。第一个筒状料仓23出完料后,驱轮电机62反转驱动拨筒轮61反向轴转,使得拨筒轮61反向拨动第一个筒状料仓23直至第一个筒状料仓23复位到如图9状态,筒第二受感磁块24对准进轮口25进而被霍尔传感器组69所感应到,此状态下筒状料仓23的出料口朝上,控制器使驱轮电机62停机使得筒状料仓23保持其出料口朝上的状态。拨筒轮61分别拨动另外两个筒状料仓23的原理与拨筒轮61拨动第一个筒状料仓23的原理相同,不再赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1