一种卷料取卸料夹手机构的制作方法
本发明涉及锂电池极卷上下料的,特别涉及一种卷料取卸料夹手机构。
背景技术:
1、在锂电池生产工艺过程中,需要对极卷进行上下料操作,目前极卷上下料操作主要通过人工推动手动推车实现,首先人工利用手动推车将极卷料从缓存架取下,进一步搬运到分切上料端上料,然后将多个空卷筒放到分切下料端;分切完后,将分切上料端的空卷筒取下,再将新的一卷极卷料放入上料端,再将分切下料端分切好的两卷或多卷小极卷卷料取放到分切后缓存架上,再放一组空卷筒至分切下料端,以此循环。显然,由于大极卷物料自重达到750kg,分切后小极卷物料每卷自重在100kg至300kg,因此,通过上述方式进行搬运只能一卷一卷的进行搬运,并存在工作负荷重的情况。
技术实现思路
1、本发明所要解决的技术问题是克服现有技术的不足,提供了一种搬运效率高和能够满足一卷或多卷极卷上下料的卷料取卸料夹手机构。
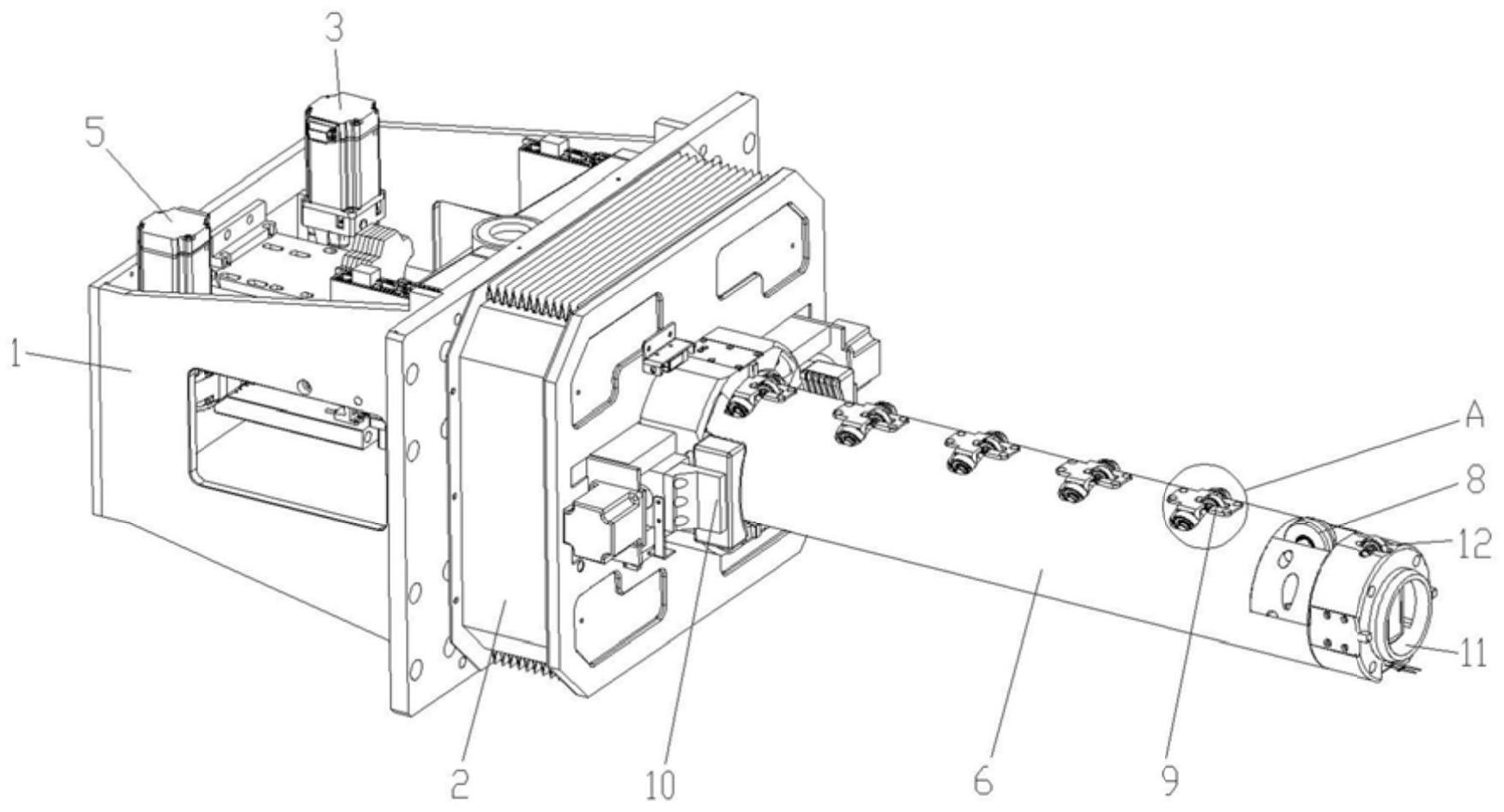
2、本发明所采用的技术方案是:本发明包括固定座、抓手和第一驱动机构,所述固定座的前端设置有悬臂,所述抓手上设置有开口,所述抓手通过所述开口套设在所述悬臂的外部,所述悬臂上设置有导向组件,所述第一驱动机构驱动所述抓手在所述悬臂上移动,所述抓手的前端具有夹爪组件。
3、进一步,所述的卷料取卸料夹手机构还包括第二驱动机构,所述悬臂上设置有动力轮,所述第二驱动机构驱动所述动力轮转动。
4、进一步,所述悬臂的前端连接有对接导向件,所述对接导向件上设置有过渡轮,所述对接导向件中设置有高精度定位相机,所述对接导向件的前端设置有第一感应片和第一传感器,所述第一感应片在被压缩时触发所述第一传感器。
5、进一步,所述动力轮位于所述悬臂的前端,所述动力轮的下端位于所述悬臂中,所述动力轮的上端外露于所述悬臂的上端,所述导向组件包括多个导向轴承组,多个所述导向轴承组沿着所述悬臂的轴向分布。
6、进一步,每个所述导向轴承组均包括三个导向轴承,三个所述导向轴承沿着所述悬臂的周向分布。
7、进一步,所述固定座上设置有物料到位组件。
8、进一步,所述夹爪组件包括两个夹爪电机,所述夹爪电机通过丝杆组件驱动夹头移动,两个所述夹头分别位于所述开口的两侧。
9、进一步,所述抓手上设置有物料检测传感器、第二感应片和第二传感器,所述第二感应片在被压缩时触发所述第二传感器。
10、进一步,所述第一驱动机构包括第一电机、第一链轮传动组件以及多个滑轮组,多个所述滑轮组设置在所述开口的内壁,多个所述滑轮组抵接于所述悬臂上,所述第一电机与所述第一链轮传动组件传动,所述第一链轮传动组件上连接有直线导轨组件,所述直线导轨组件与所述抓手连接。
11、进一步,所述第二驱动机构包括第二电机,所述第二电机通过第二链轮传动组件驱动所述动力轮转动。
12、本发明的有益效果是:
13、相对于现有技术的不足,本发明可同时满足一卷或多卷极卷上下料,满足从分切上料到卷绕上料整个生产工序的物料切换,可取代重复、繁重的人工取放物料及搬运工作,提高物料周转搬运效率和整体生产作业效率,使得本发明具有搬运效率高和能够满足一卷或多卷极卷上下料的优点。
技术特征:
1.一种卷料取卸料夹手机构,其特征在于:其包括固定座(1)、抓手(2)和第一驱动机构(5),所述固定座(1)的前端设置有悬臂(6),所述抓手(2)上设置有开口(7),所述抓手(2)通过所述开口(7)套设在所述悬臂(6)的外部,所述悬臂(6)上设置有导向组件(9),所述第一驱动机构(5)驱动所述抓手(2)在所述悬臂(6)上移动,所述抓手(2)的前端具有夹爪组件(10)。
2.根据权利要求1所述的一种卷料取卸料夹手机构,其特征在于:所述的卷料取卸料夹手机构还包括第二驱动机构(3),所述悬臂(6)上设置有动力轮(8),所述第二驱动机构(3)驱动所述动力轮(8)转动。
3.根据权利要求1所述的一种卷料取卸料夹手机构,其特征在于:所述悬臂(6)的前端连接有对接导向件(11),所述对接导向件(11)上设置有过渡轮(12),所述对接导向件(11)中设置有高精度定位相机(13),所述对接导向件(11)的前端设置有第一感应片(15)和第一传感器(16),所述第一感应片(15)在被压缩时触发所述第一传感器(16)。
4.根据权利要求2所述的一种卷料取卸料夹手机构,其特征在于:所述动力轮(8)位于所述悬臂(6)的前端,所述动力轮(8)的下端位于所述悬臂(6)中,所述动力轮(8)的上端外露于所述悬臂(6)的上端,所述导向组件(9)包括多个导向轴承组,多个所述导向轴承组沿着所述悬臂(6)的轴向分布。
5.根据权利要求4所述的一种卷料取卸料夹手机构,其特征在于:每个所述导向轴承组均包括三个导向轴承(17),三个所述导向轴承(17)沿着所述悬臂(6)的周向分布。
6.根据权利要求1所述的一种卷料取卸料夹手机构,其特征在于:所述固定座(1)上设置有物料到位组件(18)。
7.根据权利要求1所述的一种卷料取卸料夹手机构,其特征在于:所述夹爪组件(10)包括两个夹爪电机(19),所述夹爪电机(19)通过丝杆组件驱动夹头(20)移动,两个所述夹头(20)分别位于所述开口(7)的两侧。
8.根据权利要求7所述的一种卷料取卸料夹手机构,其特征在于:所述抓手(2)上设置有物料检测传感器(21)、第二感应片(22)和第二传感器,所述第二感应片(22)在被压缩时触发所述第二传感器。
9.根据权利要求1-8任一项所述的一种卷料取卸料夹手机构,其特征在于:所述第一驱动机构(5)包括第一电机(28)、第一链轮传动组件(29)以及多个滑轮组(23),多个所述滑轮组(23)设置在所述开口(7)的内壁,多个所述滑轮组(23)抵接于所述悬臂(6)上,所述第一电机(28)与所述第一链轮传动组件(29)传动,所述第一链轮传动组件(29)上连接有直线导轨组件(30),所述直线导轨组件(30)与所述抓手(2)连接。
10.根据权利要求2所述的一种卷料取卸料夹手机构,其特征在于:所述第二驱动机构(3)包括第二电机(26),所述第二电机(26)通过第二链轮传动组件(27)驱动所述动力轮(8)转动。
技术总结
本发明公开了一种卷料取卸料夹手机构,旨在提供种搬运效率高和能够满足一卷或多卷极卷上下料的卷料取卸料夹手机构。本发明包括固定座、抓手和第一驱动机构,所述固定座的前端设置有悬臂,所述抓手上设置有开口,所述抓手通过所述开口套设在所述悬臂的外部,所述悬臂上设置有导向组件,所述第一驱动机构驱动所述抓手在所述悬臂上移动,所述抓手的前端具有夹爪组件。本发明应用于锂电池极卷上下料的技术领域。
技术研发人员:黄辉平,昝学彦,李飞军,李家钧,阮伟杰,张四龙,陈琼,陈斯源,邹家帅,蒋干胜,徐波
受保护的技术使用者:珠海创智科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!