一种充磁夹具的制作方法
1.本实用新型涉及夹具相关的技术领域,尤其是一种充磁夹具。
背景技术:
2.充磁是使磁性物质磁化或使磁性不足的磁体增加磁性。一般是把要充磁的可带磁性物体放在有直流电通过的线圈所形成的磁场里,充磁过程中需要有夹具对磁材进行操作,通常的做法是准备清洁磁材用夹具夹取磁材放置到清洁区,磁材清洁后再用其他夹具夹取磁材到充磁区,充磁后再用夹具取下完成充磁,充磁过程有对磁材的准备清洁、准备充磁、充磁完成夹取操作。
3.现在市场或厂家充磁过程中大多使用的夹具都需要人工操作,人工把磁材放置到夹具上充磁,充磁后取下,再放置到包装区等,多个步骤,人工操作耗时长、繁琐,很少有多步自动完成的充磁夹具。
技术实现要素:
4.本实用新型是为了克服现有技术中充磁过程中不能自动完成磁材操作的问题,提供一种能够自动完成磁材操作的充磁夹具。
5.为了实现上述目的,本实用新型采用以下技术方案:
6.一种充磁夹具,包括支架、导轨、驱动器和若干手臂,所述的导轨置于支架的上方并与支架固定连接,所述的支架上安装有电源,所述的电源与驱动器电连接,所述的手臂与导轨滑动连接,所述的驱动器与手臂连接,任意一个手臂上安装有接收器和传感器,所述的接收器设有与其匹配的发射器,所述的发射器安装在支架上,所述的接收器和传感器均与驱动器连接。
7.电源给驱动器供电,驱动器和手臂连接并控制手臂,驱动器控制多个手臂在导轨上左右滑动,手臂上安装接收器和感应器,接收器接收发射器的信号后反馈给驱动器,驱动器自动控制手臂停止并控制手臂抓磁材,感应器感应手臂夹磁材状态,通过接收器和感应器自动控制手臂的活动和操作,多个手臂对应不同状态的磁材,在充磁过程中对不同磁材夹取,从夹取磁材、移动磁材再到放置磁材多个步骤一次完成,整个过程无需人工。
8.作为优选,所述的手臂在导轨上等距排列分布,相邻手臂之间设有连杆,所述的手臂与连杆固定连接。连杆把手臂固定连接在一起,手臂同时一起滑动,手臂同时对不同磁材夹取自动完成。
9.作为优选,所述的发射器置于手臂的下方,所述的发射器与电源连接。发射器发射信号,手臂移动过程中其上的接收器接收到信号后,自动进行下一步操作,简单快捷。
10.作为优选,所述的驱动器包括单片机和电机,所述的单片机分别与电机、接收器、传感器和电源电连接。单片机与接收器和感应器一起通过电机实现多个操作自动完成。
11.作为优选,所述的手臂上设有伸缩杆和抓手,所述伸缩杆的上端置于手臂下端,所述的抓手与伸缩杆的下端固定连接,所述的伸缩杆与手臂上下滑动连接。驱动器控制伸缩
杆自动伸缩抓取磁材。
12.作为优选,所述的抓手形状为方形体,所述抓手的左右两侧面上设有若干孔,所述的抓手左右两侧设有对称分布的夹板,所述的夹板上固定安装有与孔匹配的若干轴,所述的夹板通过轴和孔的配合安装在抓手上,所述的传感器安装在抓手的内部。夹板通过轴与孔的配合在抓手上左右滑动连接,左右夹板通过轴在抓手上张开和闭合,传感器感应到抓到磁材后自动反馈给驱动器,驱动器自动的控制夹板夹取磁材。
13.本实用新型的有益效果是:设置多个手臂,控制手臂在导轨上移动,每个手臂能夹住不同状态的磁材,再控制手臂到达相应区域完成一次充磁,整个过程自动完成。
附图说明
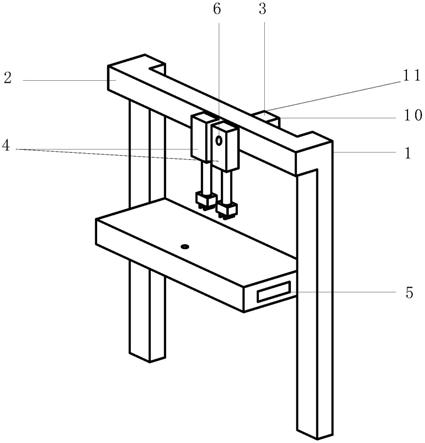
14.图1是本实用新型的一种结构示意图;
15.图2是图1的前视图;
16.图3是抓手的结构示意图。
17.图中:1.支架,2.导轨,3.驱动器,4.手臂,5.电源,6.接收器,7.传感器,8.发射器,9.连杆,10.单片机,11.电机,12.伸缩杆,13.抓手,14.孔,15.夹板,16.轴。
具体实施方式
18.下面结合附图和具体实施方式对本实用新型做进一步的描述。
19.如图1和图2所示的实施例中,一种充磁夹具,包括支架1、导轨2、驱动器3和若干手臂4,导轨2置于支架1的上方并与支架1固定连接,支架1上安装有电源5,电源5与驱动器3电连接,手臂4与导轨2滑动连接,驱动器3与手臂4连接,任意一个手臂4上安装有接收器6和传感器7,接收器6设有与其匹配的发射器8,发射器8安装在支架1上,接收器6和传感器7均与驱动器7连接。手臂4在导轨2上等距排列分布,相邻手臂4之间设有连杆9,手臂4与连杆9固定连接。发射器8置于手臂4的下方,发射器8与电源5连接。驱动器3包括单片机10和电机11,单片机10分别与电机11、接收器6、传感器7和电源5电连接。手臂4上设有伸缩杆12和抓手13,伸缩杆12的上端置于手臂4下端,抓手13与伸缩杆12的下端固定连接,伸缩杆12与手臂4上下滑动连接。抓手13形状为方形体,抓手13的左右两侧面上设有若干孔14,抓手13左右两侧设有对称分布的夹板15,夹板15上固定安装有与孔14匹配的若干轴16,夹板15通过轴16和孔14的配合安装在抓手13上,传感器7安装在抓手13的内部。
20.支架1左右两侧下端与地面固定,支架1上端的横向安装导轨2,导轨2成矩形,导轨2上安装三个手臂4,三个手臂4等距离排列在导轨2上,手臂4间用连杆9固定连接,三个手臂4在导轨2上同时同向滑动。驱动器3置于导轨2后侧,支架1上有安装磁材所在的平台,电源5安装在平台的内部且给驱动器供电,其中一个手臂4的上端安装接收器6,手臂4下端是磁材所在的平台,把发射器8安装在磁材所在的平台上。手臂4形状呈方形体形状,手臂4下部是伸缩杆12,伸缩杆12为圆柱形,伸缩杆12下端安装抓手13,手臂4内有气缸和伸缩杆12连接,支架1后面的驱动器3是由单片机10和电机11组成的,通过单片机10通过电机11控制手臂4在导轨2上滑动,手臂4上的气缸控制伸缩杆12在手臂4下端上下伸缩。
21.如图2和图3所示,抓手13形状为方块体,里面有气缸,手臂4的抓手13内部安装传感器7,抓手13左右两侧面有孔14,抓手13左右两边各有一块夹板15,两夹板15内侧上部安
装轴16,夹板15通过轴16和孔14连接在抓手13两旁,抓手13内的气缸与轴16连接。
22.如图1、图2和图3所示,手臂4在导轨2上先向左滑动,当第一个手臂4上的接收器6到一个磁材下面会接收到发射器8的信号,驱动器3控制所有手臂4停止滑动,此时每个手臂4下面对应的不同状态的磁材,然后手臂4通过气缸控制伸缩杆12向下伸出,用抓手13通过气缸和夹板15夹住磁材,手臂4的抓手13内的传感器7是压力传感器,传感器7感应到抓手13夹住了磁材后,会发送信号给驱动器3,驱动器3控制伸缩杆12向上回收,然后手臂4再向右移动到下一个地方后,伸缩杆12伸出,抓手13放下磁材,伸缩杆12回收,手臂4再向左移动继续接收发射器8信号,如此往复。
23.本充磁夹具设置支架1、导轨2、手臂4和驱动器3,驱动器3控制多个手臂4同时同向在导轨2上移动,手臂4到达对应磁材位置后,夹取磁材,再移动到下一个对应位置放下磁材,几个手臂4一次完成对不同磁材的夹取,所有过程都由驱动器3控制自动完成。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1