底座结构及具有该底座机构的移动巡检机器人
1.本发明涉及自动化技术领域,具体地说,涉及一种底座结构及具有该底座结构的移动巡检机器人。
背景技术:
2.一些废旧锂电池在分拣后,在可回收的锂电池中可能有因机器分拣误差导致一些不可回收的锂电池混在里面,故需要对其进行随机抽检,以确定分拣后锂电池中可回收锂电池中的占比,由于需要随机抽检,故巡检机器人不能够保持在一个检测点位进行工件的抽取,而是需要移动至多个点位进行样品的抽取。
3.现有的巡检机器人在巡检时,若遇到斜坡,因其底盘一般设置较大,且离地面的距离较近,所以在遇到一些坡度较陡的斜坡,其底盘会抵靠在斜坡的坡面上,致使移动巡检机器人无法沿斜坡正常行走,较为不便。
技术实现要素:
4.为了解决上述技术问题,本发明通过下述技术方案得以解决。
5.底座结构,其包括底座主体,底座主体包括上方开口设置的安装盒,安装盒的下方设有行走机构,行走机构包括两个相向或背向运动的驱动机构及转向机构,驱动机构用于底座主体的行走,转向机构用于底座主体的转向;安装盒下方分别设于行走机构两侧的升降机构,升降机构包括用于抵靠在地面上的支撑块,安装盒内腔内设有第一电动气缸,第一电动气缸的活塞端伸入安装盒的下方且连接在支撑块的上端面;安装盒的开口设有安装盘,安装盘中部向安装盒内腔形成固定腔。
6.本发明中,通过上述设置,下文所提供的具有该底座结构的移动巡检机器人安装于安装盒处,其通过行走机构实现不同工位的移动,以实现对工件的随机抽检;遇到坡度较陡的斜坡时,其通过控制第一电动气缸,以使第一电动气缸的活塞端延伸,由于与第一电动气缸活塞端连接的支撑块下升至抵靠地面后被地面所抵挡,故该底座主体在第一电动气缸的作用下被抬起一定高度,其次通过控制驱动机构及转向机构的相互背向移动,使得转向机构能够抵靠在斜坡的坡面上,再使第一电动气缸将支撑块缓慢收回,使得该底座主体的下端面平行于该斜坡的坡面,从而便于该具有该底座结构的移动巡检机器人在斜坡处的移动。
7.作为优选,安装盒下端面设有条形槽,条形槽内设有正反牙丝杠,正反牙丝杠套设有两个相向或背向运动的第一螺母块及第二螺母块,第一螺母块及第二螺母块分别通过一连接件与驱动机构及转向机构连接;安装盒的侧壁设有驱动正反牙丝杆转动的第一驱动电机。
8.本发明中,通过条形槽、正反牙丝杠、第一螺母块、第二螺母块及第一驱动电机的设置,使得第一驱动电机驱动正反牙丝杠位于条形槽内转动,继而使得第一螺母块及第二螺母块能够相向或背向运动,从而实现驱动机构及转向机构之间相向或背向运动。
9.作为优选,驱动机构包括通过连接件与第一螺母块连接的第一壳体,第一壳体内设有驱动杆,驱动杆的伸出第一壳体的两端连接有车后轮,驱动杆位于第一壳体内同轴连接有第一锥齿轮,第一壳体外侧壁上设有第二驱动电机,第二驱动电机输出轴伸入第一壳体内且设有与第一锥齿轮相啮合的第二锥齿轮;
10.转向机构包括通过连接件与第二螺母块连接的第二壳体,第二壳体内远离连接件的两端均设有固定柱,固定柱上均设有转动架,转动架中部转动设于固定柱处,转动架一端连接有车前轮,另一端设有安装环,转动架一端与另一端形成自中部形成一定的夹角,第二壳体内部设有沿左右方向滑动的移动板,移动板的两端分别与两侧处的安装环间设有连接板,连接板的两端分别铰接于安装环与移动板上,移动板的一侧设有齿条,第二壳体的外侧壁上设有第三驱动电机,第三驱动电机输出轴伸入第二壳体内且设有与齿条相啮合的第一齿轮;位于第二壳体两侧的车前轮在第三驱动电机正转或反转的作用下同向左转或同向右转。
11.本发明中,通过驱动机构的设置,使得第二驱动电机驱动第二锥齿轮转动,进而使得第一锥齿轮带动驱动杆转动,进而实现带动第一壳体两侧的车后轮的转动,即实现驱动机构带动该底座主体的行走;
12.通过转向机构的设置,使得第三驱动电机驱动第一齿轮转动,进而带动移动板向左滑动或向右滑动,使得转动架因连接板跟随移动板转动,进而带动第二壳体两侧的车前轮同向左转或同向右转,即实现转向机构带动该底座主体的转向。
13.作为优选,安装盒上端面同轴可转动地设有转动柱,转动柱上端设有垂于转动柱轴向的长条板,长条板设有沿长度方向设有滑轨,长条板上端面设有沿长条板滑动的滑块,长条板下端面设有安装套,安装套上端部伸入滑轨且连接在滑块的下端面。
14.本发明中,通过转动柱、长条板、滑轨、滑块、长条板、安装套的设置,巡检机器人安装于安装套处,当该具有该底座结构的巡检机器人执行巡检工作时,该底座机构可通过控制转动柱的转向,以及控制滑块在长条板处的滑动,以使巡检机器人对工件的夹持并输送至收纳箱。
15.本发明还提供了具有该底座结构的移动巡检机器人,其用于配合上述所提供的底座结构,使得该移动巡检机器人在底座结构的作用下随机移动至一工位对工件进行抽检,较为方便。
16.移动巡检机器人包括夹爪装置,夹爪装置包括两个平行间隔设置的第一安装板、第二安装板,第二安装板与第二安装板之间设有两个可相向或背向滑动的夹持块,两个夹持块用于配合夹持工件;两个夹持块内均设有输送机构,输送机构包括多个沿夹持块长度方向间隔布置的输送辊,两个夹持块处的输送辊用于配合输送工件;第一安装板与第二安装板相对的板面分别设有第一开口槽、第二开口槽,第一安装板的外侧壁且位于第一开口槽处设有推动机构,推动机构包括可朝向或背向第二开口槽移动的推板;当工件在输送机构的作用下移动至第一开口槽与第二开口槽之间时,推板用于将工件自当前位置推出第二开口槽,第二安装板的外侧壁处设有连通第二开口槽处的收纳箱。
17.本发明中,通过上述设置,使得上述底座结构带动该移动巡检机器人移动至一检测工位,使得两夹持块对已分拣后的可回收锂电池进行夹持,接着输送机构驱动两夹持块内的输送辊转动,进而能够带动已分拣后的可回收锂电池沿两夹持块的侧壁进行上升至第
一开口槽与第二开口槽之间,继而推动机构驱动推板将已分拣后的可回收锂电池自第一开口槽与第二开口槽之间推出第二开口槽落入收纳箱中,以备后续人工检测;
18.其中,在一检测工位,可对一个或数个已分拣后的可回收锂电池进行夹持并输送至收纳箱中,接着移动至下一个检测工位,继续对一个或数个已分拣后的可回收锂电池进行夹持并输送至收纳箱中,直至收纳箱荷载。
19.作为优选,第二安装板处设有滑槽,两夹持块的上端部均设有伸入滑槽内的滑动块,滑槽内设有驱动两滑动块相向或背向滑动的转动杆;第二安装板的侧壁设有第一安装槽,第一安装槽内设有用于驱动转动杆转动的第六驱动电机。
20.本发明中,通过滑槽、滑动块、转动杆的设置,使得转动杆转动带动两滑动块在滑槽内相向或背向滑动,也即带动两夹持块相向或背向滑动,以实现对已分拣后的可回收锂电池的夹持并输送至收纳箱中。
21.本发明中,通过第六驱动电机的设置,较佳地实现转动杆在滑槽内的转动。
22.作为优选,夹持块主要由一个沿长度方向设置多个转动腔的夹持架及两个分别设置在夹持架两侧的夹持盖板构成,输送辊设置于转动腔内;输送机构包括设置在夹持架上端部处的第二安装槽,第二安装槽内设有第七驱动电机,输送辊同轴设有链轮,其中一个夹持盖板朝向链轮的一侧设有供链轮伸入的驱动腔,第六驱动电机的输出轴与多个输送辊的链轮通过链条连接,多个输送辊在第七驱动电机的作用下同步同向转动;输送辊沿其周向均匀设置多个抵靠块,输送辊内设有多个沿输送辊周向设置的弹簧安装腔,多个弹簧安装腔沿输送辊轴向设置多组,弹簧安装腔内设有挡块,挡块同轴设有伸出弹簧安装腔的连接杆,抵靠块连接在连接杆上;弹簧安装腔内设有用于保持抵靠块朝外运动的压缩弹簧。
23.本发明中,通过夹持架、转动腔、夹持盖板、输送辊的设置,较佳地实现输送辊在夹持块内的装配。
24.本发明中,通过第七驱动电机、输送辊、链轮、链条的设置,使得第七驱动电机的输出轴转动时,进而使得每个输送辊在对应转动腔内同步同向转动,进而实现夹持在两夹持块之间的已分拣后的可回收锂电池之前多个输送辊的作用下自夹爪装置的下方移动至第一开口槽与第二开口槽处。
25.本发明中,通过抵靠块、压缩弹簧、挡块、连接杆的设置,使得两夹持块在夹持已分拣后的可回收锂电池时,已分拣后的可回收锂电池的两端分别抵靠在抵靠块的侧壁上,其弹簧安装腔内的压缩弹簧被挤压,也即能够使得已分拣后的可回收锂电池在两夹持块作用下夹持的更佳稳定。
26.作为优选,卡爪装置包括设于第一安装板与第二安装板之间的安装架,安装架包括设于第一安装板与第二安装板之间上端处的桁杆以及分别设置在第一安装板与第二安装板之间两侧处的侧杆。
27.本发明中,通过安装架的设置,较佳地实现第一安装板与第二安装板之间的装配。
28.作为优选,推动机构包括设置在第一安装板外侧壁且对应第一开口槽的矩形安装框,矩形安装框的外侧壁设有第二电动气缸,推板连接在第二电动气缸的输出轴上。
29.本发明中,通过矩形安装框、第二电动气缸、推板的设置,使得已分拣后的可回收锂电池沿两夹持块的侧壁进行上升至第一开口槽与第二开口槽之间,第二电动气缸带动推板将已分拣后的可回收锂电池自第一开口槽与第二开口槽之间推出第二开口槽落入收纳
箱中。
30.作为优选,桁杆上端面设有伸入安装套内的安装杆,安装套的侧壁上沿竖直方向均匀间隔设有多个定位孔,安装套的外壁上设有用于将安装杆在安装套内定位的定位部。
31.本发明中,通过安装杆、安装套、定位孔、定位部的设置,通过安装杆在安装套内滑动及定位部在对应定位孔处对安装杆在安装套内的定位,从而实现该移动巡检机器人在安装套处的装配。
附图说明
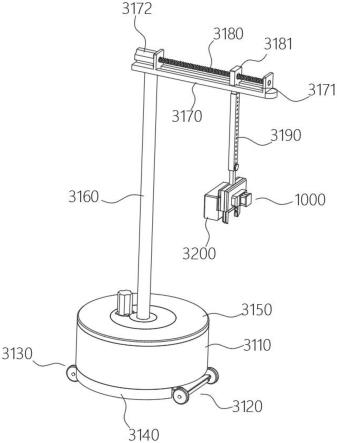
32.图1为实施例1中的底座结构及具有该底座结构的移动巡检机器人的示意图。
33.图2为实施例1中的底座主体的示意图。
34.图3为实施例1中的底座主体的部分示意图。
35.图4为实施例1中的底座主体的一剖面示意图。
36.图5为实施例1中的底座主体的另一剖面示意图。
37.图6为实施例1中的驱动机构、转向机构的示意图。
38.图7为实施例1中的驱动机构的示意图。
39.图8为实施例1中的转向机构的示意图。
40.图9为实施例1中的底座结构及具有该底座结构的移动巡检机器人的部分示意图。
41.图10为图9中的爆炸示意图。
42.图11为实施例2中的卡爪装置的结构示意图。
43.图12为实施例2中的卡爪装置的另一视角示意图。
44.图13为实施例2中的卡爪装置的爆炸示意图。
45.图14为实施例2中的卡爪装置的另一视角爆炸示意图。
46.图15为实施例2中的第一安装板的示意图。
47.图16为实施例2中的第二安装板的示意图。
48.图17为实施例2中的安装架的示意图。
49.图18为实施例2中的夹持块的示意图。
50.图19为实施例2中的夹持块的爆炸示意图。
51.图20为实施例2中的夹持块的另一视角爆炸示意图。
52.图21为实施例2中的输送辊的示意图。
53.图22为实施例2中的输送辊的爆炸示意图。
具体实施方式
54.为进一步了解本发明的内容,结合附图和实施例对本发明作详细描述。应当理解的是,实施例仅仅是对本发明进行解释而并非限定。
55.实施例1
56.如图1-10所示,本实施例提供了底座结构,其包括底座主体,底座主体包括上方开口设置的安装盒3110,安装盒3110的下方设有行走机构,行走机构包括两个相向或背向运动的驱动机构3130及转向机构3120,驱动机构3130用于底座主体的行走,转向机构3120用于底座主体的转向;安装盒3110下方分别设于行走机构两侧的升降机构,升降机构包括用
于抵靠在地面上的支撑块3140,安装盒3110内腔内设有第一电动气缸3310,第一电动气缸3310的活塞端伸入安装盒3110的下方且连接在支撑块3140的上端面;安装盒3110的开口设有安装盘3150,安装盘3150中部向安装盒3110内腔形成固定腔3210。
57.本实施例中,通过上述设置,下文所提供的具有该底座结构的移动巡检机器人安装于安装盒3110处,其通过行走机构实现不同工位的移动,以实现对工件的随机抽检;遇到坡度较陡的斜坡时,其通过控制第一电动气缸3310,以使第一电动气缸3310的活塞端延伸,由于与第一电动气缸3310活塞端连接的支撑块3140下升至抵靠地面后被地面所抵挡,故该底座主体在第一电动气缸3310的作用下被抬起一定高度,其次通过控制驱动机构3130及转向机构3120的相互背向移动,使得转向机构3120能够抵靠在斜坡的坡面上,再使第一电动气缸3310将支撑块3140缓慢收回,使得该底座主体的下端面平行于该斜坡的坡面,从而便于该具有该底座结构的移动巡检机器人在斜坡处的移动;
58.值得一提的是,驱动机构3130具有正转或单转自锁功能,其能够在第一电动气缸3310将支撑块3140完全收回至安装盒3110处时,驱动机构3130此时能够自锁,以防止该具有该底座结构的移动巡检机器人反向滑动,较为可靠。
59.本实施例中,安装盒3110下端面设有条形槽3410,条形槽3410内设有正反牙丝杠3420,正反牙丝杠3420套设有两个相向或背向运动的第一螺母块3520及第二螺母块3530,第一螺母块3520及第二螺母块3530分别通过一连接件3510与驱动机构3130及转向机构3120连接;安装盒3110的侧壁设有驱动正反牙丝杆转动的第一驱动电机3630。
60.通过本实施例中条形槽3410、正反牙丝杠3420、第一螺母块3520、第二螺母块3530及第一驱动电机3630的设置,使得第一驱动电机3630驱动正反牙丝杠3420位于条形槽3410内转动,继而使得第一螺母块3520及第二螺母块3530能够相向或背向运动,从而实现驱动机构3130及转向机构3120之间相向或背向运动。
61.本实施例中,驱动机构3130包括通过连接件3510与第一螺母块3520连接的第一壳体3610,第一壳体3610内设有驱动杆3620,驱动杆3620的伸出第一壳体3610的两端连接有车后轮3640,驱动杆3620位于第一壳体3610内同轴连接有第一锥齿轮3621,第一壳体3610外侧壁上设有第二驱动电机3740,第二驱动电机3740输出轴伸入第一壳体3610内且设有与第一锥齿轮3621相啮合的第二锥齿轮3631;
62.转向机构3120包括通过连接件3510与第二螺母块3530连接的第二壳体3710,第二壳体3710内远离连接件3510的两端均设有固定柱,固定柱上均设有转动架3760,转动架3760中部转动设于固定柱处,转动架3760一端连接有车前轮3750,另一端设有安装环,转动架3760一端与另一端形成自中部形成一定的夹角,第二壳体3710内部设有沿左右方向滑动的移动板3720,移动板3720的两端分别与两侧处的安装环间设有连接板3730,连接板3730的两端分别铰接于安装环与移动板3720上,移动板3720的一侧设有齿条3721,第二壳体3710的外侧壁上设有第三驱动电机3540,第三驱动电机3540输出轴伸入第二壳体3710内且设有与齿条3721相啮合的第一齿轮3741;位于第二壳体3710两侧的车前轮3750在第三驱动电机3540正转或反转的作用下同向左转或同向右转。
63.本实施例中,通过驱动机构3130的设置,使得第二驱动电机3740驱动第二锥齿轮3631转动,进而使得第一锥齿轮3621带动驱动杆3620转动,进而实现带动第一壳体3610两侧的车后轮3640的转动,即实现驱动机构3130带动该底座主体的行走;
64.通过转向机构3120的设置,使得第三驱动电机3540驱动第一齿轮3741转动,进而带动移动板3720向左滑动或向右滑动,使得转动架3760因连接板3730跟随移动板3720转动,进而带动第二壳体3710两侧的车前轮3750同向左转或同向右转,即实现转向机构3120带动该底座主体的转向。
65.本实施例中,安装盒3110上端面同轴可转动地设有转动柱3160,转动柱3160上端设有垂于转动柱3160轴向的长条板3170,长条板3170设有沿长度方向设有滑轨3171,长条板3170上端面设有沿长条板3170滑动的滑块,长条板3170下端面设有安装套3190,安装套3190上端部伸入滑轨3171且连接在滑块的下端面。
66.通过本实施例中转动柱3160、长条板3170、滑轨3171、滑块、长条板3170、安装套3190的设置,巡检机器人安装于安装套3190处,当该具有该底座结构的巡检机器人执行巡检工作时,该底座机构可通过控制转动柱3160的转向,以及控制滑块在长条板3170处的滑动,以使巡检机器人对工件的检测。
67.本实施例中,转动柱3160下端设有插入固定腔3210内的安装座3810,安装座3810的外壁沿其周向设置有多个卡槽3811,固定腔3210内壁沿其周向设置有多个配合卡槽3811卡入的卡柱3220。
68.通过本实施例中安装座3810、卡槽3811、卡柱3220的设置,较佳地实现转动柱3160在底座处的装配。
69.本实施例中,安装座3810内设有转动槽3911以及与转动槽3911连接的驱动槽3912,转动柱3160下端伸入转动槽3911内的端部同轴连接有第二齿轮3920,驱动槽3912内设有与第二齿轮3920相啮合的第三齿轮3930,安装座3810的上端面设有驱动第三齿轮3930转动的第四驱动电机3820。
70.通过本实施例中转动槽3911、驱动槽3912、第二齿轮3920、第三齿轮3930及第四驱动电机3820的设置,较佳地实现转动柱3160的转动。
71.本实施例中,长条板3170上设有两个垂于长条板3170且分别设置在滑轨3171两端的安装耳片,两安装耳片之间设有螺杆3180,滑动部3181螺纹连接在螺杆3180上;一安装耳片的侧壁上设有驱动螺杆3180转动的第五驱动电机3172。
72.通过本实施例中螺杆3180、滑动部3181、第五驱动电机3172的设置,较佳地实现滑动部3181在长条板3170处的滑动,即能够带动安装套3190在长条板3170处的滑动。
73.实施例2
74.本实施例提供了具有该底座结构的移动巡检机器人,其用于配合实施例1所提供的底座结构,使得该移动巡检机器人在底座结构的作用下随机移动至一工位对工件进行抽检,较为方便。
75.如图11-22所示,移动巡检机器人包括夹爪装置1000,夹爪装置1000包括两个平行间隔设置的第一安装板1110、第二安装板1120,第二安装板1120与第二安装板1120之间设有两个可相向或背向滑动的夹持块1140,两个夹持块1140用于配合夹持工件;两个夹持块1140内均设有输送机构,输送机构包括多个沿夹持块1140长度方向间隔布置的输送辊1150,两个夹持块1140处的输送辊1150用于配合输送工件;第一安装板1110与第二安装板1120相对的板面分别设有第一开口槽1410、第二开口槽1310,第一安装板1110的外侧壁且位于第一开口槽1410处设有推动机构,推动机构包括可朝向或背向第二开口槽1310移动的
推板1530;当工件在输送机构的作用下移动至第一开口槽1410与第二开口槽1310之间时,推板1530用于将工件自当前位置推出第二开口槽1310,第二安装板1120的外侧壁处设有连通第二开口槽1310处的收纳箱3200。
76.本实施例中,通过上述设置,使得上述底座结构带动该移动巡检机器人移动至一检测工位,使得两夹持块1140对已分拣后的可回收锂电池进行夹持,接着输送机构驱动两夹持块1140内的输送辊1150转动,进而能够带动已分拣后的可回收锂电池沿两夹持块1140的侧壁进行上升至第一开口槽1410与第二开口槽1310之间,继而推动机构驱动推板1530将已分拣后的可回收锂电池自第一开口槽1410与第二开口槽1310之间推出第二开口槽1310落入收纳箱3200中,以备后续人工检测;
77.其中,在一检测工位,可对一个或数个已分拣后的可回收锂电池进行夹持并输送至收纳箱3200中,接着移动至下一个检测工位,继续对一个或数个已分拣后的可回收锂电池进行夹持并输送至收纳箱3200中,直至收纳箱3200荷载;
78.值得一提的是,该移动巡检机器人实则为搬运机器人,其主要目的是对已分拣后的可回收锂电池进行随机抽取至收纳箱3200中,以使后续人工对抽取的已分拣后的可回收锂电池进行再一次检测该锂电池是否具备可回收利用的价值。
79.本实施例中,第二安装板1120处设有滑槽1510,两夹持块1140的上端部均设有伸入滑槽1510内的滑动块1550,滑槽1510内设有驱动两滑动块1550相向或背向滑动的转动杆1560;第二安装板1120的侧壁设有第一安装槽1520,第一安装槽1520内设有用于驱动转动杆1560转动的第六驱动电机1320。
80.通过本实施例中滑槽1510、滑动块1550、转动杆1560的设置,使得转动杆1560转动带动两滑动块1550在滑槽1510内相向或背向滑动,也即带动两夹持块1140相向或背向滑动,以实现对已分拣后的可回收锂电池的夹持并输送至收纳箱3200中。
81.通过本实施例中第六驱动电机1320的设置,较佳地实现转动杆1560在滑槽1510内的转动。
82.本实施例中,夹持块1140主要由一个沿长度方向设置多个转动腔11110的夹持架1540及两个分别设置在夹持架1540两侧的夹持盖板1570构成,输送辊1150设置于转动腔11110内;输送机构包括设置在夹持架1540上端部处的第二安装槽11120,第二安装槽11120内设有第七驱动电机11130,输送辊1150同轴设有链轮11220,其中一个夹持盖板1570朝向链轮11220的一侧设有供链轮11220伸入的驱动腔1610,第六驱动电机11130的输出轴与多个输送辊1150的链轮11220通过链条11140连接,多个输送辊1150在第七驱动电机11130的作用下同步同向转动;输送辊1150沿其周向均匀设置多个抵靠块11230,输送辊1150内设有多个沿输送辊1150周向设置的弹簧安装腔11310,多个弹簧安装腔11310沿输送辊1150轴向设置多组,弹簧安装腔11310内设有挡块11330,挡块11330同轴设有伸出弹簧安装腔11310的连接杆373011340,抵靠块11230连接在连接杆373011340上;弹簧安装腔11310内设有用于保持抵靠块11230朝外运动的压缩弹簧11320。
83.通过本实施例中夹持架1540、转动腔11110、夹持盖板1570、输送辊1150的设置,较佳地实现输送辊1150在夹持块1140内的装配;
84.通过本实施例中第七驱动电机11130、输送辊1150、链轮11220、链条11140的设置,使得第七驱动电机11130的输出轴转动时,进而使得每个输送辊1150在对应转动腔11110内
同步同向转动,进而实现夹持在两夹持块1140之间的已分拣后的可回收锂电池之前多个输送辊1150的作用下自夹爪装置1000的下方移动至第一开口槽1410与第二开口槽1310处。
85.通过本实施例中抵靠块11230、压缩弹簧11320、挡块11330、连接杆373011340的设置,使得两夹持块1140在夹持已分拣后的可回收锂电池时,已分拣后的可回收锂电池的两端分别抵靠在抵靠块11230的侧壁上,其弹簧安装腔11310内的压缩弹簧11320被挤压,也即能够使得已分拣后的可回收锂电池在两夹持块1140作用下夹持的更佳稳定;
86.此外,已分拣后的可回收锂电池运动至第一开口槽1410与第二开口槽1310之间时,由于已分拣后的可回收锂电池被弹性夹持,这不仅使得其已分拣后的可回收锂电池在轴向上得到较佳地稳定,而且已分拣后的可回收锂电池在轴向上存在可活动的夹持行程,也即便于推板1530推动已分拣后的可回收锂电池自第一开口槽1410与第二开口槽1310之间时自第二开口槽1310推出落入收纳箱3200中。
87.本实施例中,卡爪装置1000包括设于第一安装板1110与第二安装板1120之间的安装架1130,安装架1130包括设于第一安装板1110与第二安装板1120之间上端处的桁杆11010以及分别设置在第一安装板1110与第二安装板1120之间两侧处的侧杆11020。
88.通过本实施例中安装架1130的设置,较佳地实现第一安装板1110与第二安装板1120之间的装配。
89.本实施例中,推动机构包括设置在第一安装板1110外侧壁且对应第一开口槽1410的矩形安装框1160,矩形安装框1160的外侧壁设有电动气缸1170,推板1530连接在第二电动气缸1170的输出轴上。
90.通过本实施例中矩形安装框1160、第二电动气缸1170、推板1530的设置,使得已分拣后的可回收锂电池沿两夹持块1140的侧壁进行上升至第一开口槽1410与第二开口槽1310之间,第二电动气缸1170带动推板1530将已分拣后的可回收锂电池自第一开口槽1410与第二开口槽1310之间推出第二开口槽1310落入收纳箱3200中。
91.本实施例中,桁杆上端面设有伸入安装套3190内的安装杆3830,安装套3190的侧壁上沿竖直方向均匀间隔设有多个定位孔3850,安装套3190的外壁上设有用于将安装杆3830在安装套3190内定位的定位部3840。
92.通过本实施例中安装杆3830、安装套3190、定位孔3850、定位部3840的设置,通过安装杆3830在安装套3190内滑动及定位部3840在对应定位孔3850处对安装杆3830在安装套3190内的定位,从而实现该移动巡检机器人在安装套3190处的装配。
93.总之,以上所述仅为本发明的较佳实施例,凡依本发明申请专利范围所作的均等变化与修饰,皆应属本发明专利的涵盖范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1