一种机械手夹爪快换装置的制作方法
1.本技术涉及机械手夹爪的技术领域,具体地涉及一种机械手夹爪快换装置。
背景技术:
2.如今自动化技术日益成熟,在加工领域的普及程度越来越大,而在obc加工领域,部分加工过程由于成本上的限制,导致加工设备无法全面自动化加工,不仅影响生产效率,还增加了人力成本。
3.obc是车载充电机的简称on board charger,其主要功能:电网电压经由地面交流充电桩、交流充电口连接至车载充电机,再给电动电池进行充电。而车载充电机为了满足供电转换需求需要配备相应的pcb功率板,由于对功能的需求不同,所以对pcb功率板的需求也有不同的型号,不同型号的pcb功率板外形和尺寸都有差异,因此在自动化安装的过程中,使用到的夹爪的尺寸也不一样,因此每切换安装不同型号的pcb功率板就需要更换不同类型的夹爪,现有一个pcb功率板安装机械手只能装载一种夹爪,如需更换夹爪需要人工更换并且从新接线,耗时长且安装不稳定,也不利于长期维护。
4.如公开号为cn113967921a的一项中国专利,其公开了一种机器人手爪和夹具快换机构,该方案是通过双v结构的设计,使机器人可以自主或者通过人工便捷将卡爪进行装载和拆卸,但是这种设计结构复杂,且不适用于需要连接多接口的夹爪。
5.如公开号为cn207656717u的一项中国专利,其公开了一种机器人快换夹爪,该方案是通过转动设置了多个不同功能夹爪在同一机械手上,需要换夹爪使用时通过转动即可,但是对比pcb功率板的夹爪而言,需要对接线路,因此多个夹爪设置在同一机械手上容易发生干涉,并且会占用过多空间,并且不易对pcb功率板进行夹爪。
技术实现要素:
6.本技术所要解决的技术问题是克服现有技术的不足,提供了一种自动更换夹爪以及高效率的机械手夹爪快换装置,来解决现有obc加工领域机械夹爪更换夹爪需要人工更换夹爪以及人工接线从而造成加工效率低下以及人工成本高等问题。
7.本技术所采用的技术方案是:本技术包括多轴机械手以及夹爪组,所述多轴机械手的活动端设置有快换公头和工业相机,所述快换公头设置有第一转接块和若干公头气阀,所述公头气阀与外部负压装置导通,所述第一转接块上设置有bd公头以及若干信号导孔,所述bd公头与所述多轴机械手上设置的控制端电性连接,所述夹爪组包括第一夹爪和第二夹爪,所述第一夹爪和所述第二夹爪顶部均设置有快换母头,所述快换母头设置有第二转接块和若干母头气阀,所述公头气阀与所述母头气阀向导通配合,所述第二转接块上设置有bd母头以及若干信号传导针,所述bd母头与所述夹爪组上的控制端电性连接,所述信号传导针与所述信号导孔相电性配合。
8.由上述方案可见,本技术通过所述多轴机械手上设置的所述快换公头和所述工业相机通过视觉定位,来进行对位调整,便于自动对接,在对接过程中,所述第一转接块上的
若干所述信号导孔与所述第二转接块上的若干所述信号传导针进行匹配,并通过内部传导,因此能实现所述多轴机械手与所述夹爪组的控制连接,在进行快速连接时,所述公头气阀与所述母头气阀相导通配合,再通过所述公头气阀与外部负压装置导通提供负压,从而将所述第一夹爪或所述第二夹爪吸起,从而完成快速更换夹爪的目的,并且还不需要人工再进行插线工作,从而提高了效率并且有效取代了人工更换夹爪带来的麻烦。
9.一个优选方案是,所述第一转接块上设置有九个信号导孔,所述bd公头上设置有与九个所述信号导孔电性连接的九个针脚,所述第二转接块上设置有与九个所述信号导孔相配合的九个信号传导针,所述bd母头上设置有与九个所述信号传导针电性连接的九个针脚孔。
10.由上述方案可见,所述第一转接块上通过设置有九个所述信号导孔,所述bd公头上设置九个所述针脚,所述第二转接块上设置九个所述信号传导针,所述bd母头上设置九个所述针脚孔,可以提高控制端对所述夹爪组上输出端的控制的数量,这样能有效满足对多传感器、多执行元件的夹爪的控制,能有效提高对夹爪的使用效果。
11.一个优选方案是,所述多轴机械手的活动端设置有长腰型孔,所述工业相机限位设置在所述长腰型孔上。
12.由上述方案可见,所述长腰型孔可以便于所述工业相机进行位置调整,便于其调整安装再所述多轴机械手上。
13.一个优选方案是,所述第一夹爪包括第一夹爪架,所述第一夹爪架上设置有两个第一夹爪气缸,所述第一夹爪气缸的输出端设置有第一夹爪件,所述第一夹爪件上设置有两个爪块。
14.由上述方案可见,所述第一夹爪通过所述第一气缸去控制所述第一夹爪件移动,再通过所述爪块实现其夹爪功能。
15.一个优选方案是,所述第一夹爪架上设置有第一限位柱,所述第一夹爪件上设置有与所述第一限位柱相配合的第一限位槽。
16.由上述方案可见,所述第一限位槽将所述第一限位柱进行限位,提高了所述夹爪件在移动过程中的安全性。
17.一个优选方案是,所述第一夹爪架上设置有第一滑轨,所述第一夹爪件上设置有与所述第一滑轨相配合的第一滑块。
18.由上述方案可见,所述第一滑轨和所述第一滑块配合,提高了所述第一夹爪件移动时的稳定性。
19.一个优选方案是,所述第一夹爪架上设置有若干第一定位气缸,所述第一定位气缸的输出端均设置有第一定位柱。
20.由上述方案可见,所述第一定位气缸控制所述第一定位柱提高定位效果,提高所述第一夹爪的准确性。
21.一个优选方案是,所述第一夹爪架上设置有控制集成件,所述控制集成件一端与所述bd母头电性连接,所述控制集成件另一端与其他传感器电性连接。
22.由上述方案可见,所述控制集成件便于集成化控制传感器,美化外观,节省空间。
附图说明
23.图1是本实用新型的立体结构示意图;
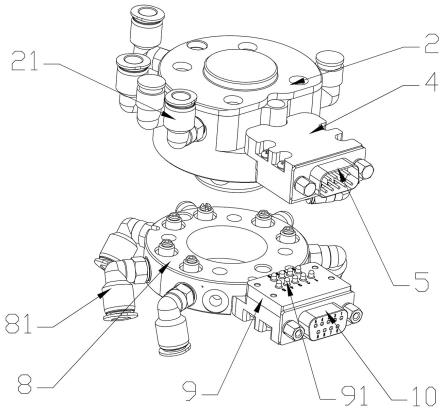
24.图2是所述快换公头和所述第一夹爪的立体结构示意图;
25.图3是所述快换公头和所述快换母头的第一视角示意图;
26.图4是所述快换公头和所述快换母头的第二视角示意图;
27.图5是所述第一夹爪的立体结构示意图。
具体实施方式
28.为了更清楚的理解本技术的特征和优点,下面通过实例并结合附图1至附图5对本技术进行进一步的说明。在本实施例中,本技术包括多轴机械手1以及夹爪组,所述多轴机械手1的活动端设置有快换公头2和工业相机3,所述快换公头2设置有第一转接块4和若干公头气阀21,所述公头气阀21与外部负压装置导通,所述第一转接块4上设置有bd公头5以及若干信号导孔41,所述bd公头5与所述多轴机械手1上设置的控制端电性连接,所述夹爪组包括第一夹爪6和第二夹爪7,所述第一夹爪6和所述第二夹爪7顶部均设置有快换母头8,所述快换母头8设置有第二转接块9和若干母头气阀81,所述公头气阀21与所述母头气阀81向导通配合,所述第二转接块9上设置有bd母头10以及若干信号传导针91,所述bd母头10与所述夹爪组上的控制端电性连接,所述信号传导针91与所述信号导孔41相电性配合。
29.在本实施例中,所述第一转接块4上设置有九个信号导孔41,所述bd公头5上设置有与九个所述信号导孔41电性连接的九个针脚,所述第二转接块9上设置有与九个所述信号导孔41相配合的九个信号传导针91,所述bd母头10上设置有与九个所述信号传导针91电性连接的九个针脚孔,该配合的九个所述信号导孔41可以传导不同的信号源,从而实现不同功能的电性连接,来提高本技术在使用过程中的其他操作功能。
30.在本实施例中,所述多轴机械手1的活动端设置有长腰型孔11,所述工业相机3限位设置在所述长腰型孔11上,所述长腰型孔便于所述工业相机3调整不同的采集位置,提高精准度,并且能够便于调试,从而使本技术处于最佳的视觉数据采集状态。
31.在本实施例中,所述第一夹爪6包括第一夹爪架61,所述第一夹爪架61上设置有两个第一夹爪气缸62,所述第一夹爪气缸62的输出端设置有第一夹爪件63,所述第一夹爪件63上设置有两个爪块64。
32.在本实施例中,所述第一夹爪架61上设置有第一限位柱65,所述第一夹爪件63上设置有与所述第一限位柱65相配合的第一限位槽66,提高限位效果,增加本技术的安全性和稳定性,减少更换夹爪过程中的晃动。
33.在本实施例中,所述第一夹爪架61上设置有第一滑轨67,所述第一夹爪件63上设置有与所述第一滑轨67相配合的第一滑块68。
34.在本实施例中,所述第一夹爪架61上设置有若干第一定位气缸611,所述第一定位气缸611的输出端均设置有第一定位柱612,便于确定输出位置,提高更换夹爪过程的精准度,提高本技术的实用性。
35.在本实施例中,所述第一夹爪架61上设置有控制集成件69,所述控制集成件69一端与所述bd母头10电性连接,所述控制集成件69另一端与其他传感器电性连接。
36.本技术的工作原理:
37.本技术通过所述多轴机械手1上设置的所述快换公头2和所述工业相机3通过视觉定位,来进行对位调整,便于自动对接,在对接过程中,所述第一转接块4上的若干所述信号导孔41与所述第二转接块9上的若干所述信号传导针91进行匹配,并通过内部传导,因此能实现所述多轴机械手1与所述夹爪组的控制连接,在进行快速连接时,所述公头气阀21与所述母头气阀81相导通配合,再通过所述公头气阀21与外部负压装置导通提供负压,从而将所述第一夹爪6或所述第二夹爪7吸起,从而完成快速更换夹爪的目的,并且还不需要人工再进行插线工作,从而提高了效率并且有效取代了人工更换夹爪带来的麻烦。
38.虽然本技术的实施例是以实际方案来描述的,但是并不构成对本技术含义的限制,对于本领域的技术人员,根据本说明书对其实施方案的修改及与其他方案的组合都是显而易见的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1