一种采用仿生隔振结构的基于振动驱动的机器人
本发明涉及机器人,特别是涉及一种采用仿生隔振结构的基于振动驱动的机器人。
背景技术:
1、灵活性和可扩展性的优势使得微型机器人在各种先进技术领域中具有广泛应用。它们小巧的尺寸使它们能够穿越像洞穴和管道这样对较大机器人不可及的狭窄空间。此外,它们轻量化和紧凑设计使它们能够在复杂表面上穿越,具有卓越的地形适应性。此外,微型机器人展现出卓越的机动性,使其能够执行复杂而精确的任务。近年来,对微型机器人的广泛研究集中在不同驱动原理的基础上进行分类,例如基于材料驱动、磁场驱动、压力驱动和电机驱动类型。然而这些微型机器人的驱动系统还存在着一些挑战,压力驱动的微型机器人能源效率不高、对复杂环境的适应性差等。材料驱动的机器人依赖于外部高电压电源的传输,这种供能方式限制了微型机器人的性能和在复杂环境中的运动能力。磁控驱动方式则限制了微型机器人的运动范围和多功能性,以及操作精度不足。传统电机驱动的方式由于拥有传动机构,会阻碍微型机器人的结构简单化和小型化。基于电机的微型机器人因其能效和独立于外部系统辅助的特性而被广泛使用。它们可以分为两类:带有传动系统和不带传动系统的机器人。zarrouk等人介绍了名为"1star"的机器人,它具有传动系统,由单个电机驱动,该机器人可以直线移动或在直接命令下改变方向,无需进行预备动作。然而,由于中间传动系统的存在,尽管它们由电机驱动,具有较高的速度和由两个自由度驱动的运动,但是机器人具有复杂的传动结构(d.zarrouk and r.s.fearing,“controlled in-plane locomotion of a hexapod using a single actuator,”ieee transactions onrobotics,vol.31,no.1,pp.157-167,2015.)。vartholomeos等人提出了一种没有传动系统的平面滑动式机器人,由机载的振动微型电机产生的向心力驱动,运动遵循粘滑机制,最大速度可达1.5mm/s(p.vartholomeos and e.papadopoulos,“analysis,design andcontrol of a planar micro-robot driven by two centripetal-force actuators,”inproceedings 2006 ieee international conference on robotics and automation,2006.icra 2006.ieee,2006,pp.649-654.)。经检索,申请号为201710639760.0的发明专利涉及一种振动驱动的运动机器人,该机器人的四个振动电机布置在壳体四周,两个对称的竖直放置的电机产生用于驱动的离心力,另外两个对称的水平布置的电机用于减小机器人与地面的摩擦力,使得机器人在摩擦力最小时实现运动。经检索,申请号为201210023195.2的发明专利为一种纤毛驱动的微型机器人,该机器人由三层组成,上层包括电源模块、振动电机、控制模块和操作模块,中间为支撑连接基板,下层有两组数量、直径不同、倾角对称、高度相同的纤毛驱动腿。当振动电机转动时,底部不同位置的纤毛驱动腿会产生不同的振动幅度,通过调整纤毛驱动腿的振动幅度实现该机器人的运动。
技术实现思路
1、本发明的目的是提供一种采用仿生隔振结构的基于振动驱动的机器人,能够提高机器人的运动性能。
2、为实现上述目的,本发明提供了如下方案:
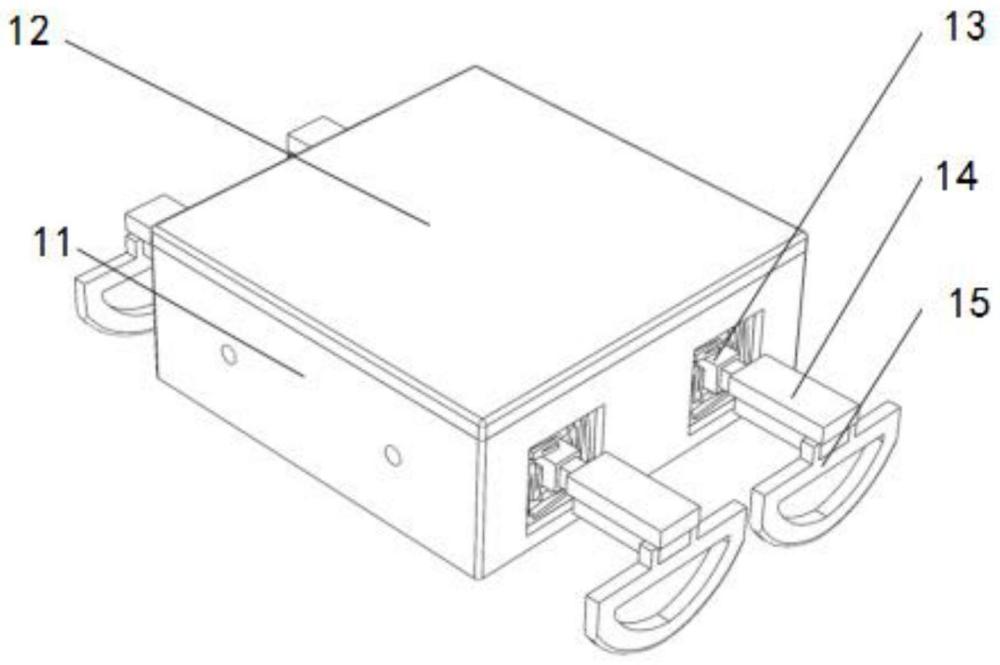
3、一种采用仿生隔振结构的基于振动驱动的机器人,所述机器人包括机器人本体、隔振结构、振动电机和振动腿;
4、所述隔振结构固定在所述机器人本体上;
5、所述隔振结构包括内框和外框;所述内框嵌套设置在所述外框内且所述内框的轴向与所述外框的轴向同向设置;所述内框通过仿生鸵鸟腿结构与所述外框固定;
6、所述振动腿与所述内框固定连接;所述振动腿用于支撑所述机器人本体;
7、所述振动电机设置在所述振动腿上;
8、所述机器人本体用于向所述振动电机发送控制指令;所述控制指令包括所述振动电机的转速和方向;
9、所述振动电机根据所述控制指令运动,并带动所述振动腿产生振动运动。
10、可选地,所述机器人本体包括机器人外壳、控制模块和驱动模块;
11、所述隔振结构固定在所述机器人外壳上;所述驱动模块和所述控制模块设置在所述机器人外壳内部;
12、所述控制模块与所述驱动模块连接;
13、所述控制模块用于根据所述控制指令生成控制信号,并将所述控制信号发送至所述驱动模块;
14、所述驱动模块用于根据所述控制信号输出预设pwm波形驱动所述振动电机运动。
15、可选地,所述隔振结构嵌设在所述机器人外壳上。
16、可选地,所述内框为中空柱体结构;所述振动腿通过插入所述内框的中空部分与所述内框固定。
17、可选地,所述内框和所述外框均为中空四棱柱体结构;
18、所述内框的外侧面包括第一外侧面、第二外侧面、第三外侧面和第四外侧面;
19、所述外框的内侧面包括第一内侧面、第二内侧面、第三内侧面和第四内侧面;
20、所述仿生鸵鸟腿结构包括第一仿生鸵鸟腿型、第二仿生鸵鸟腿型、第三仿生鸵鸟腿型和第四仿生鸵鸟腿型;
21、所述第一外侧面与所述第一内侧面相对;所述第二外侧面与所述第二内侧面相对;所述第三外侧面与所述第三内侧面相对;所述第四外侧面与所述第四内侧面相对;
22、所述第一外侧面与所述第一内侧面通过所述第一仿生鸵鸟腿型固定连接;所述第二外侧面与所述第二内侧面通过所述第二仿生鸵鸟腿型固定连接;所述第三外侧面与所述第三内侧面通过所述第三仿生鸵鸟腿型固定连接;所述第四外侧面与所述第四内侧面通过所述第四仿生鸵鸟腿型固定连接。
23、可选地,所述仿生鸵鸟腿结构包括多个仿生鸵鸟腿型;
24、各所述仿生鸵鸟腿型包括n个直线型结构;其中n为大于1的正整数;
25、第1个直线型结构的一端与所述内框的外表面固定连接;所述第1个直线型结构的另一端与第2个直线型结构的一端固定连接;
26、第i个直线型结构的另一端与第i+1个直线型结构的一端固定连接;其中,1<i<n;
27、第n个直线型结构的另一端与所述外框的内表面固定连接。
28、可选地,所述振动腿包括电机放置部分;
29、所述电机放置部分包括凹槽和电机盖子;所述振动电机放置在所述凹槽内;所述电机盖子覆盖在所述凹槽开口处;所述电机盖子用于将所述振动电机固定在所述凹槽内。
30、可选地,所述隔振结构的材料为聚乳酸材料。
31、可选地,所述隔振结构通过3d打印技术制作。
32、可选地,所述机器人还包括上位机;
33、所述上位机通过无线通讯方式向所述机器人本体发送控制信号;所述控制信号包括前进、后退、转向和静止;
34、所述机器人本体根据接收到的控制信号生成控制指令。。
35、根据本发明提供的具体实施例,本发明公开了以下技术效果:
36、本发明本发明采用了振动驱动的方式,移除了传动机构,使得机器人结构简单化和微型化;此外,引入了仿鸵鸟腿型隔振结构,减小振动驱动微型机器人中电机之间的振动耦合效应,提高了机器人的运动性能,提升了运动速度,包括直线运动速度和转弯角速度,拓展了振动驱动微型机器人的使用场景。
- 还没有人留言评论。精彩留言会获得点赞!