一种考虑机构变形的运动学标定与定位误差补偿方法
本发明涉及一种运动学标定与定位误差补偿方法,尤其是一种复杂系统的精准定位技术,具体地说是一种考虑机构变形的运动学标定与定位误差补偿方法,可以用于机器人定位领域作业精度的提升。
背景技术:
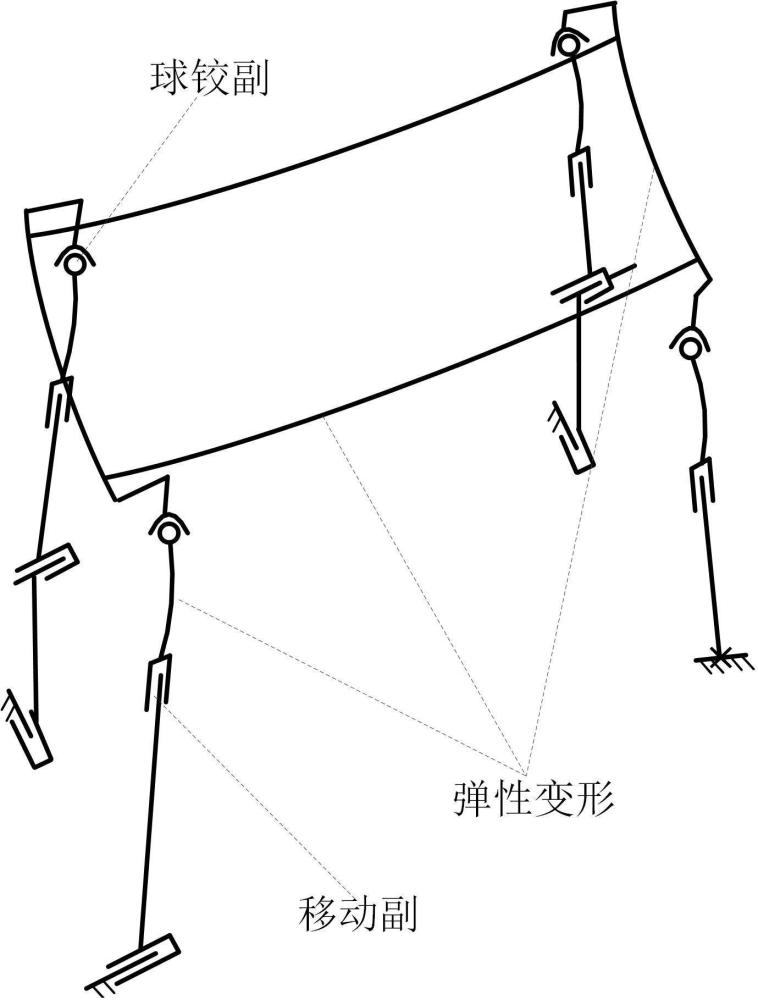
1、数控机床一般由末端执行器与调姿机构组成。调姿机构中,基于pogo柱的调姿系统具有重构性好、刚度大等优点,越来越广泛的应用于智能装配领域。其中,使用工作平台与多个pogo柱连接组成的并联调姿系统,可用于机械领域装配时零件的位姿调整。
2、部分智能装配领域所用工作平台体积较大,在自重作用下平台自身、支持平台的伸缩杆会发生弹性变形。弹性变形与系统各构件在空间中的位姿、负载大小和方向有关,空间不同位姿下的变形量不同,会影响并联调姿系统的定位精度。对于基于pogo柱的并联调姿系统而言,由于弹性变形的影响,需要制定相应的运动学标定与定位误差补偿策略。标定时使用测量设备采集的数据所计算的位姿误差为结构误差与弹性变形误差共同作用的结果,部分研究人员在误差辨识时未将结构误差引起的位姿误差与弹性变形引起的位姿误差分离,降低了结构误差辨识精度。
3、弹性误差分析考虑系统的工作平台、伸缩杆实际为柔性件,进而影响并联调姿系统的定位精度,该位姿误差的计算可以通过有限元仿真、数学建模的方式进行。
技术实现思路
1、本发明的目的是针对现有并联调姿系统定位精度不高的问题,发明一种考虑机构变形的运动学标定与定位误差补偿方法。该方法考虑工作平台、伸缩杆的弹性变形引起的位姿误差的影响,在结构误差辨识与位姿补偿时,分别对位姿误差源进行分离、目标位姿进行二次定位,提高结构误差辨识精度与定位误差补偿精度,使用机器学习方法,训练并联调姿系统自主高精度定位能力。
2、本发明的技术方案是:一种考虑机构变形的运动学标定与定位误差补偿方法,使用叠加法计算简支梁各点的挠度,将叠加法的计算结果与有限元仿真结果进行对比,计算变形量计算差值并补偿,结合粒子群算法,计算工作平台变形引起的位姿误差;基于多体动力学建模方法,分析作用在伸缩杆上的作用力、随动移动副处的摩擦力;根据作用在伸缩杆上的支持力,计算伸缩杆的变形、作用在伸缩杆上的作用力引起的位姿误差;根据随动移动副处的摩擦力,计算伸缩杆变形,然后计算摩擦力引起的位姿误差;重力、摩擦力、支持力引起的位姿误差相加,可得到弹性变形引起的总位姿误差;利用总位姿误差减去弹性变形引起的位姿误差,可得出结构误差引起的位姿误差;将结构误差引起的位姿误差输入误差模型,可进行运动学标定与结构误差辨识;理想结构参数减去辨识出的结构误差,可得到修正的结构参数;考虑弹性变形引起的总位姿误差的影响,对目标位姿进行修正,即利用理想目标位姿减去弹性变形引起的总位姿误差,可得到二次定位的目标位姿;在修正的结构参数的基础上,结合二次定位的目标位姿,进行运动学反解,控制各移动副运动,进行误差补偿;使用机器学习方法,建立目标定位位姿与移动夫运动量的关联关系,训练并联调姿系统自主高精度定位能力。
3、该技术方案的具体步骤为:(1)使用叠加法计算简支梁各点的挠度;叠加法的计算结果与有限元仿真结果进行对比,计算变形量计算差值;使用数值分析软件拟合变形量计算差值曲线;计算工作平台变形引起的位姿误差。
4、(2)使用多体动力学建模法进行动力学建模;计算出球铰处的作用力;通过驱动力计算球铰的空间位置变化量;以变形量为基础,使用最小二乘法计算球铰点位置变化引起的位姿误差。
5、(3)以多体动力学模型为基础,计算随动移动副的跟随误差;在跟随误差的基础上,计算跟随误差引起的位姿误差。
6、(4)忽略位姿误差中的高阶项,步骤(1)、(2)、(3)引起的位姿误差相加,可得出弹性变形引起的位姿误差。
7、(5)结构误差引起的位姿误差与弹性变形引起的位姿误差分离,然后进行运动学标定;忽略高阶项影响,总位姿误差矩阵减去弹性变形引起的位姿误差矩阵,即可得到结构误差引起的位姿误差矩阵。
8、(6)考虑弹性变形引起的位姿误差的影响,对目标位姿进行二次定位;二次定位方式为,目标位姿矩阵减去弹性变形引起的位姿误差矩阵。
9、(7)理想结构参数减去辨识出的结构误差,可得到修正的结构参数,即实际结构参数。
10、(8)在修正的结构参数的基础上,进行运动学反解,控制各移动副运动,进行误差补偿。
11、(9)进一步,使用机器学习方法,建立目标定位位姿与移动副运动量的关联关系,训练并联调姿系统自主高精度定位能力。
12、本发明的有益效果是:本发明提出了一种空间多姿态下的机构变形量解析计算方法,提高了弹性变形引起的位姿误差的计算精度与效率,结合运动学标定与定位误差补偿方法,能够有效提高并联调姿系统的空间定位精度。
技术特征:
1.一种考虑机构变形的运动学标定与定位误差补偿方法,其特征是:使用叠加法计算简支梁各点的挠度,叠加法的计算结果与有限元仿真结果进行对比,计算变形量差值并补偿,结合粒子群算法,计算工作平台变形引起的位姿误差;基于多体动力学建模方法,分析作用在伸缩杆上的作用力、随动移动副处的摩擦力;根据作用在伸缩杆球铰上的支持力,以悬臂梁的方式计算伸缩杆的变形,进一步计算支持力引起的位姿误差;根据随动移动副处的摩擦力,计算伸缩杆变形,然后计算摩擦力引起的位姿误差;重力、摩擦力、支持力引起的位姿误差相加,可得到弹性变形引起的总位姿误差;试验时,利用总位姿误差减去弹性变形引起的位姿误差,可得出结构误差引起的位姿误差;结构误差引起的位姿误差输入误差模型,可进行运动学标定,辨识出结构误差;理想结构参数减去辨识出的结构误差,可得到并联调姿系统修正的结构参数;考虑弹性变形引起的总位姿误差的影响,对目标位姿进行二次定位,即利用理想目标位姿减去弹性变形引起的总位姿误差,可得到误差补偿对应的目标位姿;在修正的结构参数的基础上,结合二次定位的目标位姿,进行运动学反解,控制各移动副运动,进行误差补偿;进一步,使用机器学习方法,建立目标定位位姿与移动夫运动量的关联关系,训练并联调姿系统自主高精度定位能力。
技术总结
一种考虑机构变形的运动学标定与定位误差补偿方法,可以用于机器人定位领域作业精度的提升。使用叠加法计算变形量,结合有限元仿真分析计算变形量差值,使用数值分析软件拟合插值曲线,建立变形量模型;基于变形量模型,使用粒子群算法计算相应的位姿误差。基于多体动力学建模分析作用在伸缩杆球铰上的作用力、随动移动副处的摩擦力,进一步计算相应的位姿误差。将各位姿误差相加,得到弹性变形引起的位姿误差。标定试验时,将结构误差引起的位姿误差与机构弹性变形引起的位姿误差分离,提高辨识精度;误差补偿时,考虑机构变形引起的位姿误差,对目标位姿进行二次定位,提高补偿精度;进一步,使用机器学习方法,建立目标定位位姿与移动副运动量的关联关系。本发明方法简单易行,有利于机器人作业精度提升,满足智能装配精度要求。
技术研发人员:王志浩,李洪斌,孙妮娜,李涵,李金香,孙钟慧
受保护的技术使用者:鲁东大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!