道路坡度估算方法及装置与流程
本申请涉及车辆智能控制,尤其是涉及一种道路坡度估算方法及装置。
背景技术:
1、匹配amt车辆的坡度估算对于改善其换档策略、燃油经济性和安全性至关重要。考虑到车辆偏离常规工况下道路坡度估算误差大,如车辆快速加速及制动过程中会由于车辆的俯仰运动的影响导致较大的坡度估计误差或者换挡情况下和转弯时侧向运动等对坡度估计精度的影响。目前的整车配置条件下,仅使用三轴加速度传感器的x轴或y轴进行车辆纵向加速度采集,无法满足车辆在偏离常规工况下的坡度估算,造成不必要的换挡舒适性差等问题。
技术实现思路
1、鉴于背景技术中存在的问题,本申请提供一种道路坡度估算方法及装置,该道路坡度估算方法可以改善汽车偏离常规工况下的道路坡度估算性能,提高道路坡度估算的准确性,提升驾驶体验。
2、根据本发明的一个方面,提供一种道路坡度估算方法,包括:建立车辆纵向、横向和横摆运动的三自由度动力学模型;基于所述三自由度动力学模型建立状态空间模型;基于所述状态空间模型,通过雅克比矩阵进行线性化处理,建立卡尔曼滤波方程;建立车辆俯仰动力学方程;获取汽车的车辆状态数据;基于所述车辆状态数据、所述卡尔曼滤波方程和所述车辆俯仰动力学方程,计算最优路面坡度角。
3、在本发明的一些实施方式中,基于所述三自由度动力学模型建立状态空间模型包括:在纵向动力的基础上,考虑横向位移和横摆运动建立三自由度动力学模型;
4、
5、
6、
7、式中,fx、fy、mz分别为x、y、z轴方向的合力矩;ax、ay分别为三轴加速度传感器采集的车辆前进方向和横向运动的加速度;m为汽车质量;为横摆角速度;vx、vy分别为车辆前进方向和横向运动的速度;iz为横摆转动惯量;
8、对三自由度动力学模型受力分析;
9、fx=fxcosδ-ffysinδ(7)
10、fy=fxsinδ+ffycosδ+fry(8)
11、mz=fffxsinδ+lfffycosδ-lrfry(9)
12、式中,δ为转向轮角度;lf为前轴到重心距离,lr为后轴到重心距离,ffx为车辆前轮纵向受力,ffy为车辆前轮横向受力,fry为车辆后轮横向受力;θ为坡度角,下坡时θ为正、上坡时θ为负;
13、基于所述三自由度动力学模型建立的状态空间模型包括第一状态空间模型和第二状态空间模型;其中,根据式(4)~(9)建立第一状态空间模型,根据式(4)和(7)建立第二状态空间模型。
14、在本发明的一些实施方式中,基于所述状态空间模型建立的卡尔曼滤波方程包括第一卡尔曼滤波方程和第二卡尔曼滤波方程;其中,基于所述第一状态空间模型,通过雅克比矩阵进行线性化处理,建立第一卡尔曼滤波方程;基于所述第二状态空间模型,通过雅克比矩阵进行线性化处理,建立第二卡尔曼滤波方程。
15、在本发明的一些实施方式中,建立所述车辆俯仰动力学方程包括:基于车辆的加速、减速、道路坡度和汽车质量进行由于车辆俯冲或后仰导致的坡度误差补偿,实验分析并设定多种车辆悬架系统预计的工作状态,建立所述车辆俯仰动力学方程。
16、在本发明的一些实施方式中,基于所述车辆状态数据、所述卡尔曼滤波方程和所述车辆俯仰动力学方程,计算最优路面坡度角包括:基于所述车辆状态数据、所述第一状态空间模型和所述第一卡尔曼滤波方程,计算横摆角速度和车辆的前后轮的受力;基于所述车辆状态数据、所述第二状态空间模型和所述第二卡尔曼滤波方程,计算初步路面坡度角;基于所述车辆状态数据和所述车辆俯仰动力学方程,计算坡度误差补偿角度;所述最优路面坡度角为所述初步路面坡度角和所述坡度误差补偿角度之和。
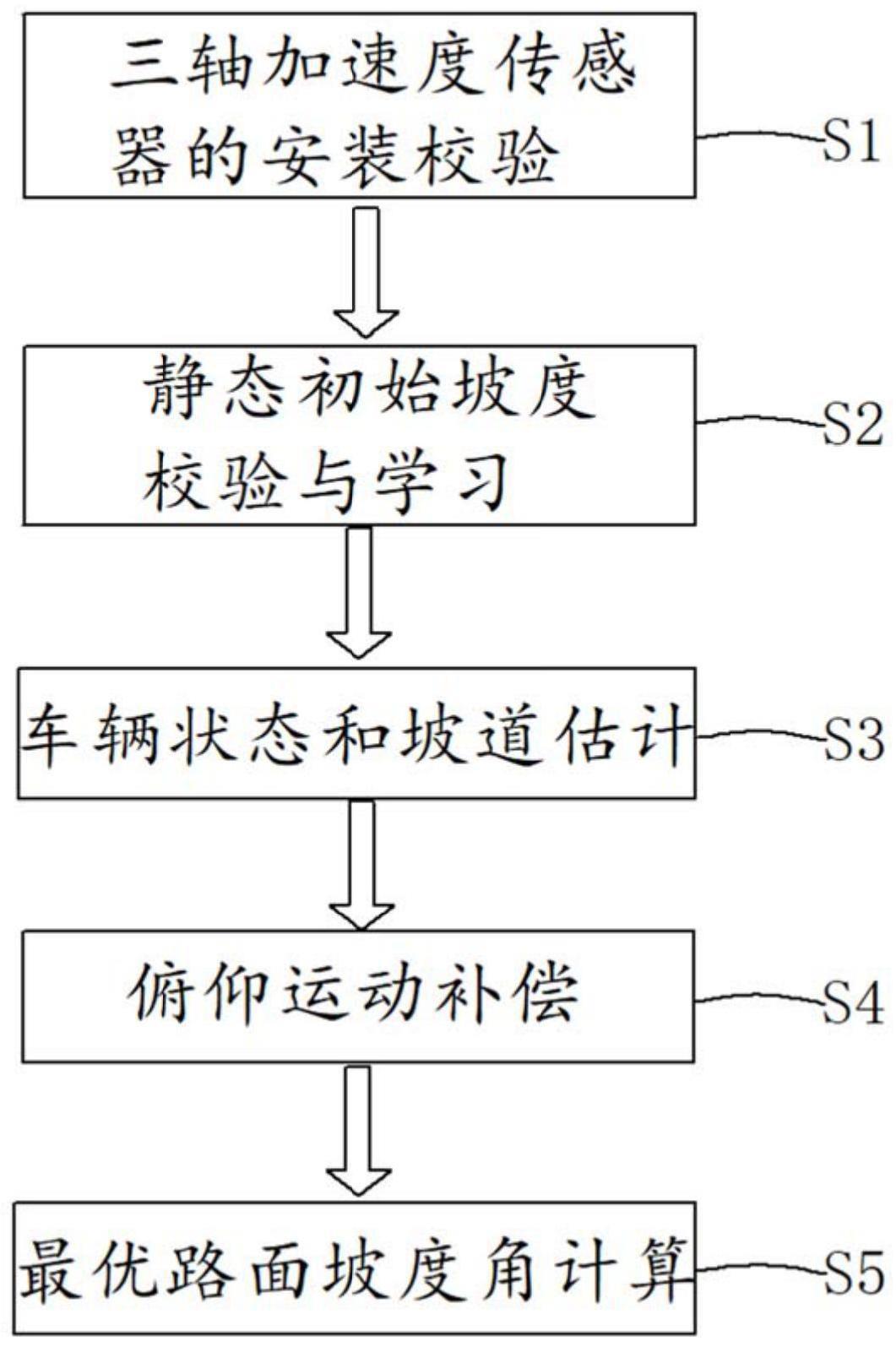
17、在本发明的一些实施方式中,在建立所述三自由度动力学模型之前,对三轴加速度传感器进行安装校验,以识别z轴、确定纵向加速度采集轴和确定横向加速度采集轴。
18、在本发明的一些实施方式中,所述三轴加速度传感器的安装校验包括:车辆状态为静止、位于水平路面、钥匙位于on挡且手刹处于制动状态;当检测到z轴方向的加速度采集值满足1g±δ,其中δ为信号采集波动误差,则所述三轴加速度传感器的z轴处于正确的安装位置;
19、然后在近似水平路面切换起步挡位后,选取当前0油门开度下对应的三轴加速度原始采集点的平均值为判断基准线;车辆处于起步状态,统计油门上升阶段三轴加速度原始采集点的平均值是否小于基准线和下偏移阈值的差值;统计油门下降阶段三轴加速度原始采集点的平均值是否大于基准线和上偏移阈值的差值;选取当前x轴或y轴中满足条件的一个轴作为纵向加速度采集轴,若运动特性满足纵向加速度原始采集特性则为正向,否则为反向。
20、在本发明的一些实施方式中,在汽车的下一次驾驶循环运转开始前,对汽车的静态初始坡度进行校验与学习。
21、在本发明的一些实施方式中,所述静态初始坡度进行校验与学习包括:检测x轴、y轴和z轴产生的加速度,利用几何关系获取车辆在静止状态下的姿态信息,并与基于所述车辆状态数据、所述第二状态空间模型和所述第二卡尔曼滤波方程计算的初步路面坡度角校验,如果满足则可行驶,否则提示进行坡度自学习。
22、在本发明的一些实施方式中,所述利用几何关系获取车辆在静止状态下的姿态信息包括:
23、
24、
25、
26、式中,θx为x轴与水平线的角度值,θy为y轴与水平线的角度值,θz为z轴与水平线的角度值;ax为重力加速度的x轴分量;ay为重力加速度的y轴分量;az为重力加速度的z轴分量。
27、根据本发明的另一个方面,提供一种道路坡度估算装置,包括:获取单元,用于获取汽车的车辆状态数据;第一存储模块,用于存储卡尔曼滤波方程;第二存储模块,用于存储车辆俯仰动力学方程;估算单元,基于所述车辆状态数据、所述卡尔曼滤波方程和所述车辆俯仰动力学方程,计算最优路面坡度角。
28、本申请实施例提供了一种道路坡度估算方法,该道路坡度估算方法在不额外增加传感器的条件下,坡度计算综合考虑了纵向、横向和横摆运动的影响,建立两个扩展卡尔曼滤波器,利用第一状态空间模型和所述第一卡尔曼滤波方程识别横摆角速度和车辆的前后轮的受力等关键参数,利用第二状态空间模型和所述第二卡尔曼滤波方程计算初步路面坡度角,同时,增加俯仰运动补偿,减小了车辆悬架运动导致的干扰,改善了汽车偏离常规工况下的道路坡度估算性能,提高了道路坡度估算的准确性,提升了驾驶体验。
技术特征:
1.一种道路坡度估算方法,其特征在于,包括:
2.根据权利要求1所述的道路坡度估算方法,其特征在于,基于所述三自由度动力学模型建立状态空间模型包括:
3.根据权利要求2所述的道路坡度估算方法,其特征在于,基于所述状态空间模型建立的卡尔曼滤波方程包括第一卡尔曼滤波方程和第二卡尔曼滤波方程;其中,基于所述第一状态空间模型,通过雅克比矩阵进行线性化处理,建立第一卡尔曼滤波方程;基于所述第二状态空间模型,通过雅克比矩阵进行线性化处理,建立第二卡尔曼滤波方程。
4.根据权利要求3所述的道路坡度估算方法,其特征在于,建立所述车辆俯仰动力学方程包括:
5.根据权利要求4所述的道路坡度估算方法,其特征在于,基于所述车辆状态数据、所述卡尔曼滤波方程和所述车辆俯仰动力学方程,计算最优路面坡度角包括:
6.根据权利要求1所述的道路坡度估算方法,其特征在于,在建立所述三自由度动力学模型之前,对三轴加速度传感器进行安装校验,以识别z轴、确定纵向加速度采集轴和确定横向加速度采集轴;
7.根据权利要求5所述的道路坡度估算方法,其特征在于,在汽车的下一次驾驶循环运转开始前,对汽车的静态初始坡度进行校验与学习。
8.根据权利要求7所述的道路坡度估算方法,其特征在于,所述静态初始坡度进行校验与学习包括:
9.根据权利要求8所述的道路坡度估算方法,其特征在于,所述利用几何关系获取车辆在静止状态下的姿态信息包括:
10.一种道路坡度估算装置,其特征在于,包括:
技术总结
本申请涉及车辆智能控制技术领域的一种道路坡度估算方法及装置,道路坡度估算方法包括:建立车辆纵向、横向和横摆运动的三自由度动力学模型;基于所述三自由度动力学模型建立状态空间模型;基于所述状态空间模型,通过雅克比矩阵进行线性化处理,建立卡尔曼滤波方程;建立车辆俯仰动力学方程;获取汽车的车辆状态数据;基于所述车辆状态数据、所述卡尔曼滤波方程和所述车辆俯仰动力学方程,计算最优路面坡度角。本申请的道路坡度估算方法可以改善汽车偏离常规工况下的道路坡度估算性能,提高道路坡度估算的准确性,提升驾驶体验。
技术研发人员:张振,李安迎,牛兴振,位少聪
受保护的技术使用者:潍柴动力股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!