一种模块化可变构型的足轮式机器人
1.本发明涉及一种模块化可变构型的足轮式机器人,属于空间操作领域。
背景技术:
2.随着机器人技术的发展,陆续出现一系列具有良好适应性与机动性的移动机器人,以协助或替代人类完成繁重或危险的工作。移动机器人主流运动方式为足式运动或轮式运动。轮式机器人在平坦连续地形上运动速度快、稳定性好、控制简单、能量利用率高、负载比大,适用于人工修建的室内以及道路环境,但是多数轮式机器人仅能跨越尺寸小于轮半径的障碍,不具备全地形通过性。而足式机器人能够在离散支撑点上落足,具备全地形通过性,适用于非结构化地形上的工作,但是运动规划和运动控制较为复杂,实际运动速度慢,能量利用率低、负载比小。因此出现足轮式机器人,结合轮式机器人和足式机器人的优势,在一般地形下,采用轮式运动以提升移动速度,降低能量消耗,而在崎岖地形下,切换为足式运动进行前进,具有全地形通过性,在以平坦地形为主,同时兼有部分崎岖地形的情况下体现出优异的运动特性。
3.关于足轮式机器人,如申请公布号为cn110525535a,名称为“一种双轮足混合自平衡机器人”的专利申请,公开了一种结构紧凑的一种双轮足混合自平衡机器人;例如申请公布号为cn114348135a,名称为“一种六足轮腿式爬行机器人”的专利申请,公开了一种可以调整构型的六足轮腿式爬行机器人。但是目前的足轮式机器人均为单一构型,仅能以某种单一构型进行运动,而所涉及的调整构型也仅是改变部件间距,没有实现各个模块自由组合,不能满足多样化的任务需求。
技术实现要素:
4.本发明的目的是提供一种模块化可变构型的足轮式机器人,以双足轮式机器人为单体模块,单体模块能够独立运动,也能够任意拼接成不同构型的多足轮式机器人,每个单体模块同时携带不同的载荷,各个单体模块载荷之间协同工作,实现四足、六足、八足等多足轮式运动,解决现有足轮式机器人构型单一,运动方式单一,不能满足多样化任务需求的问题。
5.本发明的目的是通过以下技术方案实现的:
6.本发明公开的一种模块化可变构型的足轮式机器人,基本构成单元包括:双足轮式机器人模块化单体和连接装置;
7.所述双足轮式机器人模块化单体包括:1组机身和2组轮腿结构;
8.2组所述轮腿结构对称固定于所述机身两侧;
9.所述机身包括:外壁、主控板、惯性测量单元、电源管理板、电池以及电池架;
10.所述外壁呈长方体状,包括:前壁、后壁、左壁、右壁、上壁、下壁、块状连接件以及条状连接件;
11.所述前壁、所述后壁、所述左壁、所述右壁、所述上壁以及所述下壁通过所述块状
连接件以及所述条状连接件固接为整体;
12.所述前壁、所述后壁、所述左壁、所述右壁、所述上壁以及所述下壁两两相邻的公共边通过所述条状连接件固定;
13.所述前壁、所述后壁、所述左壁、所述右壁、所述上壁以及所述下壁相邻的公共角通过所述块状连接件固定;
14.所述主控板、所述惯性测量单元、所述电源管理板、所述电池以及所述电池架分别固定于所述外壁内部,所述外壁实现保护以及隔离作用;
15.所述主控板、所述惯性测量单元以及所述电源管理板均为小型电路板,固定在所述后壁上;
16.所述主控板用于实现对所述双足轮式机器人模块化单体的控制;
17.所述惯性测量单元用于获取所述双足轮式机器人模块化单体的三轴线位移、三轴线速度、三轴线加速度、三轴角位移、三轴角速度以及三轴角加速度,并传输给所述主控板用于反馈所述双足轮式机器人模块化单体的运动状态;
18.所述电源管理板根据所述主控板的控制指令,调整所述电池输出功率分配,同时实现对所述电池的过充保护、过放保护以及过流保护;
19.所述电池通过所述电池架固定于所述下壁上,为所述双足轮式机器人模块化单体提供能源;
20.作为优选,所述电池架采用桁架结构,在减轻重量的同时保证强度;
21.所述电池架的底部与所述下壁固连;
22.所述轮腿结构包括:腿部结构以及轮结构;
23.所述腿部结构包括:第一关节电机、关节电机托架、第二关节电机、大腿以及小腿;
24.所述第一关节电机包括:第一关节电机输出端外壳、第一关节电机外壳侧壁、第一关节电机固定端外壳、第一关节电机元件以及第一关节电机输出轴;
25.所述第二关节电机包括:第二关节电机输出端外壳、第二关节电机外壳侧壁、第二关节电机固定端外壳、第二关节电机元件以及第二关节电机输出轴;
26.作为优选,所述第一关节电机与所述第二关节电机为同一型号;
27.作为优选,所述关节电机托架为镂空结构,实现减轻重量以及散热的功能,所述关节电机托架的侧面具有加强筋结构,以提高强度;
28.所述大腿包括:大腿外壳以及大腿杆件;
29.所述大腿外壳包括:大腿连接件、大腿碳管以及膝关节连接件;
30.所述大腿连接件、所述大腿碳管以及所述膝关节连接件依次固连;
31.作为优选,所述大腿连接件以及所述大腿碳管均为中空部件,实现对所述大腿杆件形成包络,起到保护作用,同时内部中空能够排布线缆,使结构紧凑;
32.所述大腿杆件包括:大腿摇杆以及大腿连杆;
33.所述大腿摇杆截面为梨形,大端开孔用于固定连接,小端开孔用于实现铰接;
34.所述大腿连杆为一细长实心杆件,两端开孔用于实现铰接;
35.所述小腿包括:小腿连接件以及小腿碳管;
36.作为优选,所述小腿连接件以及所述小腿碳管均为中空部件,内部中空能够排布线缆,使结构紧凑;
37.两个所述第一关节电机固定端外壳分别通过所述左壁以及所述右壁预留的孔位与所述左壁以及所述右壁固定,所述第一关节电机输出轴通过所述关节电机托架预留的孔位与所述关节电机托架固定;所述第二关节电机固定端外壳与所述关节电机托架的一侧固连,所述第二关节电机输出端外壳与所述大腿连接件的一端固连,所述第二关节电机输出轴与所述大腿摇杆的一端固连;所述大腿摇杆的另一端与所述大腿连杆的一端进行铰接,所述大腿连杆的另一端与所述小腿连接件进行铰接;所述小腿连接件的一端分别与所述大腿连杆以及所述膝关节连接件进行铰接,另一端与所述小腿碳管固连;
38.所述第一关节电机通过所述第一关节电机输出轴的旋转驱动所述关节电机托架旋转,进而带动所述第二关节电机、所述大腿以及所述小腿进行旋转,即所述腿部结构绕所述第一关节电机输出轴进行旋转;
39.所述第二关节电机与所述第一关节电机间仅发生单自由度的旋转,而无其他自由度;
40.所述第二关节电机通过所述第二关节电机输出轴的旋转驱动所述大腿摇杆运动,进而通过所述大腿连杆控制所述小腿绕所述膝关节连接件转动;
41.所述大腿外壳、所述大腿杆件以及所述小腿连接件组成平行四连杆传动结构,当仅控制所述第二关节电机转动时,所述大腿外壳为机架,所述大腿摇杆为主动摇杆,所述大腿连杆为连杆,所述小腿连接件为被动输出摇杆,通过所述第二关节电机输出轴的转动直接控制所述小腿以同样方式运动;
42.所述小腿为所述轮结构提供安装底座,通过所述第一关节电机和所述第二关节电机联动控制足端运动;
43.所述轮结构包括:足端连接件、轮毂电机托架、轮毂电机以及包胶轮毂;
44.作为优选,所述足端连接件为中空结构,在减轻重量的同时,能够将所述轮毂电机线缆引入所述小腿碳管,使结构紧凑;
45.作为优选,所述足端连接件预留标准化接口,能够更换不同型号的所述轮毂电机;
46.作为优选,所述轮毂电机托架为镂空结构,实现减轻重量以及散热的功能,所述轮毂电机托架的侧面具有加强筋结构,以提高强度;
47.所述轮毂电机包括:轮毂电机输出端外壳、轮毂电机外壳侧壁、轮毂电机固定端外壳、轮毂电机元件以及轮毂电机输出轴;
48.作为优选,所述包胶轮毂径向截面为工字形,在与所述轮毂电机输出轴相连的面上布置减重孔,在保证强度的前提下减轻重量,同时降低对整体宽度的影响;
49.所述包胶轮毂外侧包覆胶层,胶层两侧带有切角,以使所述包胶轮毂能够倾斜转动;
50.所述足端连接件的一端与所述小腿碳管的末端固连,所述足端连接件的另一端与所述轮毂电机托架固连,实现连接所述腿部结构和所述轮结构的作用;
51.所述轮毂电机托架的一端与所述足端连接件固连,所述轮毂电机托架的另一端与所述轮毂电机固定端外壳固连,将所述轮毂电机固定端外壳与所述足端连接件固连;
52.所述轮毂电机固定端外壳与所述足端连接件固连,所述轮毂电机输出轴与所述包胶轮毂固连,所述轮毂电机输出轴的旋转驱动所述包胶轮毂相对于所述小腿旋转;
53.所述包胶轮毂与所述轮毂电机输出轴固连,所述包胶轮毂绕所述轮毂电机输出轴
进行旋转,实现在水平面内运动;
54.每组所述连接装置包括:4个管夹以及2根连接杆;
55.作为优选,所述连接杆能够采用不同材质的管件或杆件,以适应不同任务对强度和承载能力的不同需求,所述连接杆的外形包括:常规的直杆、弧形杆或折角杆,以组成不同形状的构型;
56.所述管夹固定在需连接的所述双足轮式机器人模块化单体的所述左壁、所述右壁、所述前壁或所述后壁上,所述连接杆的两端分别穿过两个所述双足轮式机器人模块化单体上的预留好的孔位以及所述管夹,通过所述管夹提供的预紧力使所述连接杆与所述管夹相连接,进而通过一组所述连接装置将两个所述双足轮式机器人模块化单体固定连接,实现不同构型的足轮式机器人。
57.有益效果:
58.本发明的一种模块化可变构型的足轮式机器人包括双足轮式机器人模块化单体和连接装置,通过连接装置能够将不同数量的双足轮式机器人模块化单体以不同尺寸和构型拼接,实现足轮式机器人构型的改变,实现多样化的足式和轮式运动状态,适应不同的地形情况,并通过改变自身构型,调整机身的稳定性、负载比以及所带载荷,完成需要携带不同尺寸、重量负载或者多载荷协同操作的任务,解决现有技术中的足轮式机器人不能根据地形或任务需求调整自身形态的技术问题。
附图说明
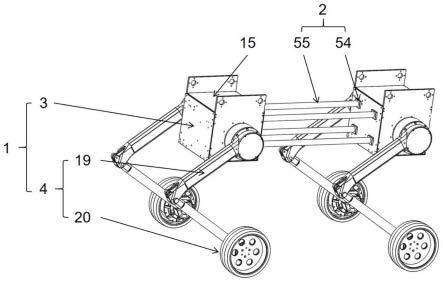
59.图1为本发明的一种模块化可变构型的足轮式机器人的四足轮式机器人构型的示意图;
60.图2为本发明的一种模块化可变构型的足轮式机器人的双足轮式机器人模块化单体的示意图;
61.图3为本发明的一种模块化可变构型的足轮式机器人的机身示意图;
62.图4为本发明的一种模块化可变构型的足轮式机器人的腿部结构示意图;
63.图5为本发明的一种模块化可变构型的足轮式机器人的关节电机示意图;
64.图6为本发明的一种模块化可变构型的足轮式机器人的轮结构示意图;
65.图7为本发明的一种模块化可变构型的足轮式机器人的轮毂电机的示意图;
66.附图标号说明:
[0067][0068]
具体实施方式
[0069]
为了更好的说明本发明的目的和优点,下面结合附图和实例对发明内容做进一步说明。
[0070]
实施例1:
[0071]
如图1所示,实施例为本发明的一种模块化可变构型的足轮式机器人的四足轮式机器人构型,包括:两个双足轮式机器人模块化单体1和两组连接装置2;
[0072]
如图2所示,双足轮式机器人模块化单体1包括:1组机身3和2组轮腿结构4;
[0073]
2组轮腿结构4对称固定于机身3两侧;
[0074]
如图3所示,机身3包括:外壁5、主控板6、惯性测量单元7、电源管理板8、电池9以及电池架10;
[0075]
外壁5呈长方体状,包括:前壁11、后壁12、左壁13、右壁14、上壁15、下壁16、块状连接件17以及条状连接件18;
[0076]
前壁11、后壁12、左壁13、右壁14、上壁15以及下壁16通过块状连接件17以及条状连接件18固接为整体;
[0077]
前壁11、后壁12、左壁13、右壁14、上壁15以及下壁16两两相邻的公共边通过条状连接件18固定;
[0078]
前壁11、后壁12、左壁13、右壁14、上壁15以及下壁16相邻的公共角通过块状连接件17固定;
[0079]
主控板6、惯性测量单元7、电源管理板8、电池9以及电池架10分别固定于外壁5内部,外壁5实现保护以及隔离作用;
[0080]
主控板6、惯性测量单元7以及电源管理板8均为小型电路板,固定在后壁12上;
[0081]
主控板6用于实现对双足轮式机器人模块化单体1的控制;
[0082]
实施例中,主控板6采用树莓派4b;
[0083]
惯性测量单元7用于获取双足轮式机器人模块化单体1的三轴线位移、三轴线速度、三轴线加速度、三轴角位移、三轴角速度以及三轴角加速度,并传输给主控板6用于反馈双足轮式机器人模块化单体1的运动状态;
[0084]
实施例中,惯性测量单元7采用维特智能wt931九轴传感器;
[0085]
电源管理板8根据主控板6的控制指令,调整电池9输出功率分配,同时实现对电池9的过充保护、过放保护以及过流保护;
[0086]
电池9通过电池架10固定于下壁16上,为双足轮式机器人模块化单体1提供能源;
[0087]
电池架10采用桁架结构,在减轻重量的同时保证强度,电池架10的底部与下壁16固连;
[0088]
如图4所示,轮腿结构4包括:腿部结构19以及轮结构20;
[0089]
腿部结构19包括:第一关节电机21、关节电机托架22、第二关节电机23、大腿24以及小腿25;
[0090]
实施例中,第一关节电机21以及第二关节电机23均采用中原动力智能机器人有限公司od-a8120-p1-6电机;
[0091]
如图5所示,第一关节电机21包括:第一关节电机输出端外壳26、第一关节电机外壳侧壁27、第一关节电机固定端外壳28、第一关节电机元件29以及第一关节电机输出轴30;
[0092]
同样如图5所示,第二关节电机23包括:第二关节电机输出端外壳31、第二关节电机外壳侧壁32、第二关节电机固定端外壳33、第二关节电机元件34以及第二关节电机输出轴35;
[0093]
关节电机托架22为镂空结构,实现减轻重量以及散热的功能,关节电机托架22的侧面具有加强筋结构,以提高强度;
[0094]
大腿24包括:大腿外壳36以及大腿杆件37;
[0095]
大腿外壳36包括:大腿连接件38、大腿碳管39以及膝关节连接件40;
[0096]
大腿连接件38、大腿碳管39以及膝关节连接件40依次固连;
[0097]
大腿连接件38以及大腿碳管39均为中空部件,实现对大腿杆件37形成包络,起到保护作用,同时内部中空能够排布线缆,使结构紧凑;
[0098]
大腿杆件37包括:大腿摇杆41以及大腿连杆42;
[0099]
大腿摇杆41截面为梨形,大端开孔用于固定连接,小端开孔用于实现铰接;大腿连杆42为一细长实心杆件,两端开孔用于实现铰接;
[0100]
小腿25包括:小腿连接件43以及小腿碳管44;
[0101]
小腿连接件43以及小腿碳管44均为中空部件,内部中空能够排布线缆,使结构紧凑;
[0102]
两个第一关节电机固定端外壳28分别通过左壁13以及右壁14预留的孔位与左壁13以及右壁14固定,第一关节电机输出轴30通过关节电机托架22预留的孔位与关节电机托架22固定;第二关节电机固定端外壳33与关节电机托架22一侧固连,第二关节电机输出端外壳31与大腿连接件38的一端固连,第二关节电机输出轴35与所述大腿摇杆41的一端固连;大腿摇杆41的另一端与大腿连杆42的一端进行铰接,大腿连杆42的另一端与小腿连接件43进行铰接;小腿连接件43的一端分别与大腿连杆42以及膝关节连接件40进行铰接,另一端与小腿碳管44固连;
[0103]
第一关节电机21通过第一关节电机输出轴30的旋转驱动关节电机托架22旋转,进而带动第二关节电机23、大腿24以及小腿25进行旋转,即腿部结构19绕第一关节电机输出轴30进行旋转;
[0104]
第二关节电机23与第一关节电机21间仅发生单自由度的旋转,而无其他自由度;
[0105]
第二关节电机23通过第二关节电机输出轴35的旋转驱动大腿摇杆41运动,进而通过大腿连杆42控制小腿25绕膝关节连接件40转动;
[0106]
大腿外壳36、大腿杆件37以及小腿连接件43组成平行四连杆传动结构,当仅控制第二关节电机23转动时,大腿外壳36为机架,大腿摇杆41为主动摇杆,大腿连杆42为连杆,小腿连接件43为被动输出摇杆,通过第二关节电机输出轴35的转动直接控制小腿25以同样方式运动;
[0107]
小腿25为轮结构20提供安装底座,通过第二关节电机23直接控制足端运动;
[0108]
如图6所示,轮结构20包括:足端连接件45、轮毂电机托架46、轮毂电机47以及包胶轮毂48;
[0109]
足端连接件45为中空结构,在减轻重量的同时,能够将轮毂电机47线缆引入小腿碳管44,使结构紧凑;
[0110]
足端连接件45预留标准化接口,能够更换不同型号的轮毂电机47;
[0111]
轮毂电机托架46为镂空结构,实现减轻重量以及散热的功能,轮毂电机托架46的侧面具有加强筋结构,以提高强度;
[0112]
如图7所示,轮毂电机47包括:轮毂电机输出端外壳49、轮毂电机外壳侧壁50、轮毂电机固定端外壳51、轮毂电机元件52以及轮毂电机输出轴53;
[0113]
实施例中,轮毂电机47采用中原动力智能机器人有限公司od-a8108-p1-6电机;
[0114]
实施例中,包胶轮毂48径向截面为工字形,在与轮毂电机输出轴53相连的面上布置减重孔,在保证强度的前提下减轻重量,同时降低对整体宽度的影响;
[0115]
包胶轮毂48外侧包覆胶层,胶层两侧带有切角,以使轮子能够倾斜转动;
[0116]
足端连接件45的一端与小腿碳管44的末端固连,足端连接件45的另一端与轮毂电机托架46固连,实现连接腿部结构19和轮结构20的作用;
[0117]
轮毂电机托架46的一端与足端连接件45固连,轮毂电机托架46的另一端与轮毂电机固定端外壳51固连,将轮毂电机固定端外壳51与足端连接件45固连;
[0118]
轮毂电机固定端外壳51与足端连接件45固连,轮毂电机输出轴53与包胶轮毂48固连,轮毂电机输出轴53的旋转驱动包胶轮毂48相对于小腿25旋转;
[0119]
包胶轮毂48与轮毂电机输出轴53固连,包胶轮毂48绕轮毂电机输出轴53进行旋转,实现在水平面内运动;
[0120]
如图1所示,实施例的四足轮式机器人构型,采用连接装置2包括:8个管夹54以及4根连接杆55;
[0121]
实施例中,连接杆55的外形为常规的直杆,采用直径16mm,厚度为3mm的碳管,所用碳纤维型号为t300,抗拉强度为3gpa,抗剪强度为45mpa,能够负载100kg以上重物而不发生断裂;
[0122]
管夹54固定在需连接的双足轮式机器人模块化单体1的左壁13、右壁14、前壁11以及后壁12上,连接杆55的两端分别穿过两个双足轮式机器人模块化单体1上的预留好的孔位以及管夹54,通过管夹54提供的预紧力使连接杆55与管夹54相连接,进而通过两组连接装置2将两个双足轮式机器人模块化单体1固定连接,实现四足轮式机器人构型。
[0123]
以上所述的具体描述,对发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1